Vous aimerez peut-être aussi
- 1.objetos y Objetivos: 1.1 Información Básica Del ProyectoDocument17 pages1.objetos y Objetivos: 1.1 Información Básica Del ProyectoAlejandro HuaiquilPas encore d'évaluation
- Requerimiento tecnicoERP-SAP PDFDocument61 pagesRequerimiento tecnicoERP-SAP PDFAESAPas encore d'évaluation
- Mercado Del Pellet en Chile AChBIOM - TEMUCO - 2017Document21 pagesMercado Del Pellet en Chile AChBIOM - TEMUCO - 2017Alejandro HuaiquilPas encore d'évaluation
- Mercado Del Pellet en Chile AChBIOM - TEMUCO - 2017Document21 pagesMercado Del Pellet en Chile AChBIOM - TEMUCO - 2017Alejandro HuaiquilPas encore d'évaluation
- Requerimiento tecnicoERP-SAP PDFDocument61 pagesRequerimiento tecnicoERP-SAP PDFAESAPas encore d'évaluation
- Estructura Organizacional CMPC ChileDocument4 pagesEstructura Organizacional CMPC ChileAlejandro HuaiquilPas encore d'évaluation
- Estructura Organizacional CMPC ChileDocument4 pagesEstructura Organizacional CMPC ChileAlejandro HuaiquilPas encore d'évaluation
- Boletín 1T 2014 Los LagosDocument3 pagesBoletín 1T 2014 Los LagosAlejandro HuaiquilPas encore d'évaluation
- 4.2.2. Metodo Del SimpsonDocument7 pages4.2.2. Metodo Del SimpsonJames Jim Huamán CamachoPas encore d'évaluation
- Estudio Sobre Desarrollo EconomicoDocument35 pagesEstudio Sobre Desarrollo EconomicoMarco Antonio CatuntaPas encore d'évaluation
- Cadenas de MarkovDocument27 pagesCadenas de MarkovTonny BSPas encore d'évaluation
- Atenuación de Las Fibras ÓpticasDocument3 pagesAtenuación de Las Fibras ÓpticasAlejandro HuaiquilPas encore d'évaluation
- 4.2.4. Método de Cuadratura GaussianaDocument8 pages4.2.4. Método de Cuadratura GaussianaGerman Diaz AvendañoPas encore d'évaluation
- Ejercicios Resueltos Series de FourierDocument22 pagesEjercicios Resueltos Series de Fourierzttelio75% (4)
- Ejercicio Práctico para PruebaDocument1 pageEjercicio Práctico para PruebaAlejandro HuaiquilPas encore d'évaluation
- Problemas Transporte Medicion FluidosDocument4 pagesProblemas Transporte Medicion FluidosAlejandro HuaiquilPas encore d'évaluation
- Estudio Sobre Desarrollo EconomicoDocument35 pagesEstudio Sobre Desarrollo EconomicoMarco Antonio CatuntaPas encore d'évaluation
- Cálculo de Enlace Fibra ÓpticaDocument11 pagesCálculo de Enlace Fibra ÓpticaBrody DanPas encore d'évaluation
- Balances de Materia Sin Reaccin Qumica en Flujo ContinuoDocument8 pagesBalances de Materia Sin Reaccin Qumica en Flujo ContinuoAlejandro HuaiquilPas encore d'évaluation
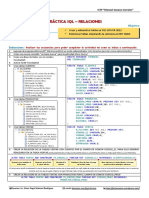
- Prc3a1ctica SQL 3Document3 pagesPrc3a1ctica SQL 3StevenWilliamsCastilloAbrilPas encore d'évaluation
- Manual Contestador AvanzadoDocument15 pagesManual Contestador AvanzadoFrancisco Domingo Noya PerezPas encore d'évaluation
- Esquema Plan de Comunicación FestivalDocument4 pagesEsquema Plan de Comunicación Festivalberdinsareazoom5508Pas encore d'évaluation
- PRUEBA de Matemáticas 4° BasicoDocument7 pagesPRUEBA de Matemáticas 4° Basicocristina torresPas encore d'évaluation
- Diseño PID de Una Planta de Separcion de CrudoDocument21 pagesDiseño PID de Una Planta de Separcion de CrudoEdison SegoviaPas encore d'évaluation
- Regresión Lineal Simple - ChsDocument7 pagesRegresión Lineal Simple - ChsranmachanPas encore d'évaluation
- Hebra HiloDocument5 pagesHebra HiloFco TzPas encore d'évaluation
- DiseñoDocument4 pagesDiseñoosvi007Pas encore d'évaluation
- Proyecto Comercio ElectronicoDocument29 pagesProyecto Comercio ElectronicoValentina EscobarPas encore d'évaluation
- Teoría de Conjuntos (Fernando Hernández Hernández)Document353 pagesTeoría de Conjuntos (Fernando Hernández Hernández)Miguel Ángel Valencia Bucio100% (5)
- Especificaciones Tecnicas CCTV Lineas l4 L4a l2 FinalDocument38 pagesEspecificaciones Tecnicas CCTV Lineas l4 L4a l2 FinalHilton Taylor NavarroPas encore d'évaluation
- INSTRUCTIVO Campaña Prevención de CaídasDocument8 pagesINSTRUCTIVO Campaña Prevención de CaídasAddyDayanaLunaDrithPas encore d'évaluation
- 10 Acta de Cierre y Entrega Del Proyecto1Document2 pages10 Acta de Cierre y Entrega Del Proyecto1Marco AguirrePas encore d'évaluation
- Momentos Evolutivos Del Proceso de La Lengua EscritaDocument8 pagesMomentos Evolutivos Del Proceso de La Lengua EscritaFRANCISCO JAVIER CABRERA CASTILLEJOSPas encore d'évaluation
- Fundamentos de ProgramaciónDocument36 pagesFundamentos de ProgramaciónLiz IribePas encore d'évaluation
- Qué Es Un Autómata ProgramableDocument6 pagesQué Es Un Autómata ProgramableAnonymous gEeZc15peQPas encore d'évaluation
- IE AP02 AA3 EV02 Espec Requerimientos SI Casos UsoDocument4 pagesIE AP02 AA3 EV02 Espec Requerimientos SI Casos UsoANDREA SANABRIAPas encore d'évaluation
- Como Convertir Un Archivo de Word A PDF Yahoo PDFDocument2 pagesComo Convertir Un Archivo de Word A PDF Yahoo PDFLarryPas encore d'évaluation
- Ibm PC Rom Bios - WikipediaDocument5 pagesIbm PC Rom Bios - WikipediaEduardo RamirezPas encore d'évaluation
- Practica - 02 - Álgebra de Boole y Teoremas de MorganDocument9 pagesPractica - 02 - Álgebra de Boole y Teoremas de MorganKevinHonoresSalvatierraPas encore d'évaluation
- Analisis No Lineal de EstruccturasDocument3 pagesAnalisis No Lineal de EstruccturasElmer Santiago LeonPas encore d'évaluation
- AutorespondedoresDocument5 pagesAutorespondedoresMaria H. GómezPas encore d'évaluation
- Material WorkShop Tableau - UAIDocument15 pagesMaterial WorkShop Tableau - UAIPedroBrainValenzuelaPas encore d'évaluation
- Cuadro SinopticoDocument5 pagesCuadro SinopticoFrancisco Ricardo Alvarez Constantino100% (1)
- Guia de Orientacion RAP 1Document5 pagesGuia de Orientacion RAP 1george424Pas encore d'évaluation
- Señales en Tiempo-Discreto PDFDocument4 pagesSeñales en Tiempo-Discreto PDFOtrebor RaplPas encore d'évaluation
- Física Computacional PDFDocument3 pagesFísica Computacional PDFLuciano Diburga RicciPas encore d'évaluation
- Medida CanadienseDocument3 pagesMedida CanadienseKiara Vásquez100% (1)
- Referencia de Maquina y Material Base en Torno CNC HaasDocument4 pagesReferencia de Maquina y Material Base en Torno CNC HaasJefe sector Metalmecánico0% (1)
- Aportadores de La CienciaDocument15 pagesAportadores de La CienciaMarjhori VelizPas encore d'évaluation