Vous aimerez peut-être aussi
- Articulo Park y ClarkDocument2 pagesArticulo Park y Clarkelbasandoval80% (5)
- D028-Metodología para El Cálculo de Equivalentes de Red Multipuerto en Estado Estable y Representación en Sistemas Eléctricos de SubtransmDocument17 pagesD028-Metodología para El Cálculo de Equivalentes de Red Multipuerto en Estado Estable y Representación en Sistemas Eléctricos de SubtransmJesus Ortiz LopezPas encore d'évaluation
- Transformadores de Tres DevanadosDocument11 pagesTransformadores de Tres DevanadosSamuel DelgadoPas encore d'évaluation
- Trabajo Con Índice 26.02.2019 2Document137 pagesTrabajo Con Índice 26.02.2019 2djcPas encore d'évaluation
- 3.-Curva de CapabilidadDocument2 pages3.-Curva de CapabilidadMartin LopezPas encore d'évaluation
- Metadinas y AmplidinasDocument13 pagesMetadinas y AmplidinasAlex Ulloa A100% (2)
- TransformadorDocument6 pagesTransformadorJuan CelyPas encore d'évaluation
- Preg 06Document5 pagesPreg 06David RuizPas encore d'évaluation
- Maq Sincrona 2010Document137 pagesMaq Sincrona 2010maximum1130% (2)
- II Examen de Maquinas EléctricasDocument2 pagesII Examen de Maquinas Eléctricasjirosi100% (1)
- Filtro SintonizadoDocument2 pagesFiltro SintonizadoSergio Soruco0% (1)
- Tipos de ExcitatricesDocument99 pagesTipos de ExcitatricesOswaldo Alberto67% (3)
- Modela T2Document1 pageModela T2Bryan Erok Sanchz Leon100% (3)
- Resonancia SubsincronaDocument19 pagesResonancia SubsincronahectorPas encore d'évaluation
- Constante de Inercia HDocument2 pagesConstante de Inercia HAbel Morales Barreto100% (1)
- Compensador Sincrono, Maquina SincronaDocument2 pagesCompensador Sincrono, Maquina SincronaResim Flores BetancurPas encore d'évaluation
- Disrupcion en VacioDocument1 pageDisrupcion en VacioSebastian CachiguangoPas encore d'évaluation
- Arrancadores para Motores de Corriente ContinuaDocument9 pagesArrancadores para Motores de Corriente ContinuaRichard AlvarezPas encore d'évaluation
- Ejercicios KothariDocument8 pagesEjercicios KothariJohan David CarrilloPas encore d'évaluation
- Taller 1 ISEEDocument2 pagesTaller 1 ISEEJohnHernandez100% (1)
- Esta Bili DadDocument89 pagesEsta Bili DadMartinPas encore d'évaluation
- DETERMINACIÓN DEL ESQUEMA DE ALIVIO DE CARGA POR BAJA FRECUENCIA DEL SISTEMA NACIONAL INTERCONECTADO - EcuadorDocument17 pagesDETERMINACIÓN DEL ESQUEMA DE ALIVIO DE CARGA POR BAJA FRECUENCIA DEL SISTEMA NACIONAL INTERCONECTADO - Ecuadordeiv_javPas encore d'évaluation
- LABORATORIO MAQUINAS - Máquina SíncronaDocument11 pagesLABORATORIO MAQUINAS - Máquina SíncronaJon BrownPas encore d'évaluation
- El Motor Trifasico de InduccionDocument5 pagesEl Motor Trifasico de InduccionXJefferXPas encore d'évaluation
- Variador de Velocidad y UPSDocument6 pagesVariador de Velocidad y UPSMario GomezPas encore d'évaluation
- Ohmetro Analogico ClaseDocument14 pagesOhmetro Analogico ClaseRossvin Alvarado PaucarPas encore d'évaluation
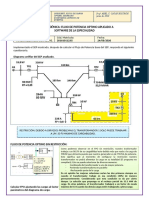
- Informe - Flujo de Potencia Optimo DigsilentDocument4 pagesInforme - Flujo de Potencia Optimo DigsilentLviis Gvstavo Hinostroza HuamaniPas encore d'évaluation
- Generadores SincronosDocument42 pagesGeneradores SincronosAlfonso SaavedraPas encore d'évaluation
- Compensación Reactiva en SEPDocument5 pagesCompensación Reactiva en SEPRaul PalianPas encore d'évaluation
- Generador Sincrono Fraan KDocument9 pagesGenerador Sincrono Fraan KJuan AlvaradoPas encore d'évaluation
- TRANSFORMADORES EN PARALELO FabianDocument8 pagesTRANSFORMADORES EN PARALELO FabianRuben Marcelo PradoPas encore d'évaluation
- Control de Tensión y Frecuencia - Central Solar Fotovoltaica - 1Document7 pagesControl de Tensión y Frecuencia - Central Solar Fotovoltaica - 1Lidia Hmk100% (1)
- Informe Nº1 - Generadores SincronosDocument17 pagesInforme Nº1 - Generadores SincronosMarco Shimabukuro HigaPas encore d'évaluation
- Arrancadores EstáticosDocument16 pagesArrancadores EstáticoscelenyPas encore d'évaluation
- Diagrama Circular de Un Motor de InducciónDocument5 pagesDiagrama Circular de Un Motor de InducciónhardPas encore d'évaluation
- Sep - Practica 5-6Document6 pagesSep - Practica 5-6Jonay Cathyfer Unda0% (1)
- Informe de PracticaDocument7 pagesInforme de PracticaJohann Smith Aranda Ramos0% (1)
- Seccionadores y CortocircuitosDocument4 pagesSeccionadores y CortocircuitosMariano Falcon FernandezPas encore d'évaluation
- Convertidores DC-DC en Dos CuadrantesDocument5 pagesConvertidores DC-DC en Dos CuadrantescarPas encore d'évaluation
- Generacion Sincrona y AsincronaDocument18 pagesGeneracion Sincrona y AsincronaYosef HanderssonPas encore d'évaluation
- Funcionamiento Del Regulador de VelocidadDocument1 pageFuncionamiento Del Regulador de Velocidadmirkoborelli67% (3)
- Maquinas Electricas - Correcion y Ajuste Del F.PDocument8 pagesMaquinas Electricas - Correcion y Ajuste Del F.Proberto dario perez verdugoPas encore d'évaluation
- Matriz y BusDocument15 pagesMatriz y BusPaola MantillaPas encore d'évaluation
- Amplidina PDFDocument12 pagesAmplidina PDFAnthony Hbk JerichoPas encore d'évaluation
- Linea21 22 23Document7 pagesLinea21 22 23caedv77Pas encore d'évaluation
- Importancia de Los Sistemas Electricos de Potencia en La Formacion Del IngenieroDocument5 pagesImportancia de Los Sistemas Electricos de Potencia en La Formacion Del IngenieroJuan Carlos Intriago DelgadoPas encore d'évaluation
- Trabajo Fallas SerieDocument28 pagesTrabajo Fallas Seriejose_mamani_51100% (1)
- Capitulo 11 - Estabilidad TransitoriaDocument76 pagesCapitulo 11 - Estabilidad TransitoriaFelipeBarreraAlvarez100% (2)
- Laboratorio 4 de Conversion Electromecanica de Energia 1 Aquino Mamani Jose AlvaroDocument13 pagesLaboratorio 4 de Conversion Electromecanica de Energia 1 Aquino Mamani Jose AlvaroJose Alvaro Aquino MamaniPas encore d'évaluation
- Accionamientos para Motores de C.ADocument25 pagesAccionamientos para Motores de C.AanonixmenPas encore d'évaluation
- Prelaboratorio InduccionDocument14 pagesPrelaboratorio InduccionJose Gregorio Gonzalez MartinezPas encore d'évaluation
- Arranque de Motor SíncronoDocument14 pagesArranque de Motor SíncronoLuis Enrique Mendez RoblesPas encore d'évaluation
- Reporte Maquina SincronaDocument25 pagesReporte Maquina SincronaIrais MedinaPas encore d'évaluation
- Motores Asincronos o de InduccionDocument16 pagesMotores Asincronos o de Induccionnilson silva cotrinaPas encore d'évaluation
- Máquina Síncrona 2018-ApuntesDocument48 pagesMáquina Síncrona 2018-ApuntesMichelPas encore d'évaluation
- Máquinas de Corriente Alterna Simétrica Trifásica ResumenDocument10 pagesMáquinas de Corriente Alterna Simétrica Trifásica ResumenPivan Hernández ArmijoPas encore d'évaluation
- Teoria de Marco de ReferenciaDocument9 pagesTeoria de Marco de ReferenciaAlfredo Gil VelascoPas encore d'évaluation
- Obtención de ParametrosDocument6 pagesObtención de ParametrosDavid PeñaPas encore d'évaluation
- Modelado de Sistemas HibridosDocument12 pagesModelado de Sistemas HibridosRamon LopezPas encore d'évaluation
- Circuito Equivalente Del Motor de InducciónDocument5 pagesCircuito Equivalente Del Motor de InducciónDiego Alejandro33% (3)
- Ficha de Evaluacion de David MezaDocument1 pageFicha de Evaluacion de David MezaDavid Meza HuamanPas encore d'évaluation
- Cuerpos de RevoluciónDocument9 pagesCuerpos de RevoluciónJavier Fernandez MelchorPas encore d'évaluation
- Areas Poligonos Resueltos Ciclo1Document6 pagesAreas Poligonos Resueltos Ciclo1David Meza Huaman100% (1)
- Areas Poligonos Resueltos Ciclo1Document6 pagesAreas Poligonos Resueltos Ciclo1David Meza Huaman100% (1)
- AirOS 5 Spanish - Ubiquiti WikiDocument37 pagesAirOS 5 Spanish - Ubiquiti WikicldiazpPas encore d'évaluation
- Manual de Adiestramiento de PerrosDocument126 pagesManual de Adiestramiento de Perrosdsa_gp2100% (4)
- Areas Poligonos Resueltos Ciclo1Document6 pagesAreas Poligonos Resueltos Ciclo1David Meza Huaman100% (1)
- SATMEX 8esDocument2 pagesSATMEX 8esDavid Meza HuamanPas encore d'évaluation
- Reg EditDocument0 pageReg EditDavid Meza HuamanPas encore d'évaluation
- Cap 10 Trans Mi SoresDocument52 pagesCap 10 Trans Mi SoresLaura VPas encore d'évaluation
- Cableado de RedDocument7 pagesCableado de RedgesperPas encore d'évaluation
- Funciones DigestivasDocument17 pagesFunciones DigestivasDavid Meza HuamanPas encore d'évaluation
- Ponencia Dr. H. ChuquipulDocument77 pagesPonencia Dr. H. ChuquipulPrevenciondelperuPas encore d'évaluation
- Formato Proy Desarrollo Tipico ProfesorDocument2 pagesFormato Proy Desarrollo Tipico ProfesorDavid Meza HuamanPas encore d'évaluation
- Resumen Por CapitulosDocument5 pagesResumen Por CapitulosDavid Meza Huaman0% (1)
- Requisitos para Inscripcion de Fiscalizacion de Grifos RuralDocument1 pageRequisitos para Inscripcion de Fiscalizacion de Grifos RuralDavid Meza HuamanPas encore d'évaluation
- MATLAB-Analisis de FourierDocument10 pagesMATLAB-Analisis de FourierRonald MorganPas encore d'évaluation
- Tabla Equivalencias LedDocument1 pageTabla Equivalencias LedLeonardo BarzolaPas encore d'évaluation
- Codigo Eléctrico ArgentinoDocument694 pagesCodigo Eléctrico ArgentinoCésar Andrés Barrios Arroyo50% (4)
- AnodosDocument66 pagesAnodosDavid Meza HuamanPas encore d'évaluation
- RudaDocument1 pageRudaDavid Meza HuamanPas encore d'évaluation
- Calibres de CablesDocument26 pagesCalibres de Cablesestebanecheverry1150% (2)
- Equipamiento TelemetricoDocument4 pagesEquipamiento TelemetricoDavid Meza HuamanPas encore d'évaluation
- Tutorial Analisis y Control de Sistemas Usando MATLABDocument44 pagesTutorial Analisis y Control de Sistemas Usando MATLABValmore CamachoPas encore d'évaluation
- Estadistica Inferencial IgnacioDocument60 pagesEstadistica Inferencial IgnacioMaria Jose Paternina HernandezPas encore d'évaluation
- AeropuertoDocument5 pagesAeropuertoAdrianaJAOPas encore d'évaluation
- ELIMED Soldadura Catalogo Viertual MarcasDocument70 pagesELIMED Soldadura Catalogo Viertual MarcaslecabascangoesPas encore d'évaluation
- Guía de Recuperación Computación - ProgramaciónDocument2 pagesGuía de Recuperación Computación - ProgramaciónGuillermo CardonaPas encore d'évaluation
- Format CPP Sellador PDFDocument1 pageFormat CPP Sellador PDFAnthony BMPas encore d'évaluation
- Sintaxis Del Lenguaje JavaDocument31 pagesSintaxis Del Lenguaje JavaLieka RomijnPas encore d'évaluation
- Cuestionario de Metales, Nomenclatura Y CompuestosDocument22 pagesCuestionario de Metales, Nomenclatura Y Compuestosclaudia alejandraPas encore d'évaluation
- IntroducciónDocument8 pagesIntroducciónhdhsdPas encore d'évaluation
- Marketing Digital Desde Cero para Emprendedores y Freelancers.Document5 pagesMarketing Digital Desde Cero para Emprendedores y Freelancers.Lizbeth RMPas encore d'évaluation
- Asientos Contables Ejercicios Guia N 02 Entregar Hoy 16Document3 pagesAsientos Contables Ejercicios Guia N 02 Entregar Hoy 16Edwin Guerrero0% (1)
- 3.-Colorantes y Pigmentos Microbianos en La Belleza CosméticaDocument8 pages3.-Colorantes y Pigmentos Microbianos en La Belleza CosméticaGLORIA ALICIA GRANILLO - DUARTEPas encore d'évaluation
- Proyecto de Operaciones Unitarias IIDocument14 pagesProyecto de Operaciones Unitarias IIAnilis VincesPas encore d'évaluation
- CuadroDocument1 pageCuadroDeicy MartínezPas encore d'évaluation
- Gestion Ambiental en La Industria CarnicaDocument19 pagesGestion Ambiental en La Industria CarnicaPablo Stein100% (1)
- Administración Del Comportamiento organizacionalEXAMEN SEMANA 6Document9 pagesAdministración Del Comportamiento organizacionalEXAMEN SEMANA 6Paulys PalaciosPas encore d'évaluation
- Sistemas Administrativos (Sesion II)Document15 pagesSistemas Administrativos (Sesion II)Roney MezaPas encore d'évaluation
- Cámara de Comercio de Bogotá - Versión para Impresión Orden de CompraDocument2 pagesCámara de Comercio de Bogotá - Versión para Impresión Orden de CompraAriday RomeroPas encore d'évaluation
- EjerciciosDocument5 pagesEjerciciosKathia AlemánPas encore d'évaluation
- Materia Prima de Origen VegetalDocument2 pagesMateria Prima de Origen VegetaljasminPas encore d'évaluation
- Articulo Cientifico (Tratamiento de Aguas Residuales en La Empresa Kimberly Clark en El Periodo 2015)Document12 pagesArticulo Cientifico (Tratamiento de Aguas Residuales en La Empresa Kimberly Clark en El Periodo 2015)JuanaPas encore d'évaluation
- Interpretacion de La Norma Api 1104 168579 Downloable 2351697Document148 pagesInterpretacion de La Norma Api 1104 168579 Downloable 2351697MarioPas encore d'évaluation
- Estándares de ServicioDocument6 pagesEstándares de ServicioViridiana Méndez GonzálezPas encore d'évaluation
- Evaluacion de La Evaluación Continua NacionalDocument41 pagesEvaluacion de La Evaluación Continua NacionalWilma Gladys Forest HerreraPas encore d'évaluation
- Hallar La Solución de Las Siguientes Integrales Paso A PasoDocument10 pagesHallar La Solución de Las Siguientes Integrales Paso A PasoIvan PachecoPas encore d'évaluation
- Taller Requisitos de Norma ISO 9001:2015Document5 pagesTaller Requisitos de Norma ISO 9001:2015soniamparoestebanPas encore d'évaluation
- Especificaciones Tecnicas Ins EléctricasDocument14 pagesEspecificaciones Tecnicas Ins EléctricasUriel Omar Atencio FloresPas encore d'évaluation
- Sopa de Letras SGSSIDocument4 pagesSopa de Letras SGSSIKevinCifuentesPas encore d'évaluation
- 5 2do - BGU. PROYECTO ARTÍSTICADocument3 pages5 2do - BGU. PROYECTO ARTÍSTICAViveres EnGeneralPas encore d'évaluation
- Simulacion de ConcremortecentoDocument21 pagesSimulacion de ConcremortecentoRoger Arevalo TrejoPas encore d'évaluation
- Hidrologia Rio ChontaDocument121 pagesHidrologia Rio Chontacarlosahq8570Pas encore d'évaluation