Vous aimerez peut-être aussi
- Benzin Motor TasarımıDocument49 pagesBenzin Motor TasarımıMertBolçay100% (4)
- 01 Kaplin&KavramaDocument26 pages01 Kaplin&KavramaEren SağnakPas encore d'évaluation
- Yapilara Etki̇ Eden Rüzgar Yükleri̇ni̇n Eurocode 1-4 Ve Asce 7-05 Standardlari Kullanilarak Karşilaştirilmasi Yüksek Li̇sans Tezi̇.Document195 pagesYapilara Etki̇ Eden Rüzgar Yükleri̇ni̇n Eurocode 1-4 Ve Asce 7-05 Standardlari Kullanilarak Karşilaştirilmasi Yüksek Li̇sans Tezi̇.GurkanPas encore d'évaluation
- KAVRAMALAR DönüştürüldüDocument28 pagesKAVRAMALAR DönüştürüldüCan KayaPas encore d'évaluation
- H Tipi Hidrolik Pres Govdesinin Yapisal Analizi VeDocument12 pagesH Tipi Hidrolik Pres Govdesinin Yapisal Analizi VeYASİRPas encore d'évaluation
- TEKNOFEST 2022 Roket Yarışması - Şartname aDLQqDocument31 pagesTEKNOFEST 2022 Roket Yarışması - Şartname aDLQqMAVİ KIRTASİYEPas encore d'évaluation
- 88 KW Motor TasarımDocument65 pages88 KW Motor TasarımMertBolçayPas encore d'évaluation
- Roket Yarışması Teknik Sorular (004) CevaplıDocument3 pagesRoket Yarışması Teknik Sorular (004) CevaplıSign UpPas encore d'évaluation
- Makasli Yuk Kaldirma Platformu TasarimiDocument32 pagesMakasli Yuk Kaldirma Platformu TasarimigladioreisPas encore d'évaluation
- Makine Dinamiği ÖdeviDocument2 pagesMakine Dinamiği ÖdeviAyse KabakPas encore d'évaluation
- Kırılma Mekaniği Ders NotlarıDocument28 pagesKırılma Mekaniği Ders NotlarıErdi ergülPas encore d'évaluation
- Makina A09c5 PDFDocument78 pagesMakina A09c5 PDFOsman DalPas encore d'évaluation
- Harmoni̇k Kuvvetlerle Zorlanmiş Sönümsüz Si̇stemi̇n Ti̇treşi̇mi̇Document16 pagesHarmoni̇k Kuvvetlerle Zorlanmiş Sönümsüz Si̇stemi̇n Ti̇treşi̇mi̇latif_cevik100% (2)
- Otomatik Vites KutulariDocument40 pagesOtomatik Vites KutulariBerk TekinPas encore d'évaluation
- UuTeorisiveTemelUakBilgisi TantmDocument16 pagesUuTeorisiveTemelUakBilgisi Tantmorhan198021Pas encore d'évaluation
- asansör320KG HesapDocument13 pagesasansör320KG HesapselisenPas encore d'évaluation
- KavramaDocument9 pagesKavramacihanPas encore d'évaluation
- Kroki Perspektif Ve Yapim ResmiDocument67 pagesKroki Perspektif Ve Yapim Resmi61zephyr61Pas encore d'évaluation
- Santrifüj Pompa Ve Modal AnalizDocument103 pagesSantrifüj Pompa Ve Modal AnalizyusufPas encore d'évaluation
- 11-Güç Aktarma Ve Kavrama Sistemi SorularıDocument8 pages11-Güç Aktarma Ve Kavrama Sistemi SorularıFerhat KayaPas encore d'évaluation
- Kavrama Elemanlari123Document5 pagesKavrama Elemanlari123Koray BAYAZITPas encore d'évaluation
- Pistona Etki Eden Gerilmelerin Analizi PDFDocument111 pagesPistona Etki Eden Gerilmelerin Analizi PDFBurak YılmazPas encore d'évaluation
- Bitirme Tezi. Umur KABACAOĞLUDocument167 pagesBitirme Tezi. Umur KABACAOĞLUUmur KabacaogluPas encore d'évaluation
- Dili Arklarin Standartlara GRE Hesaplanmasi Ve Bilgisayar Destekli Tasarimla Kontrol The Design of Spur and Helical Involute Gears With Computer SupportDocument125 pagesDili Arklarin Standartlara GRE Hesaplanmasi Ve Bilgisayar Destekli Tasarimla Kontrol The Design of Spur and Helical Involute Gears With Computer SupportCan CemrePas encore d'évaluation
- CivataDocument102 pagesCivataFatih YıldızPas encore d'évaluation
- Cekme Deneyi Ve Elastisite Modülü HesabıDocument5 pagesCekme Deneyi Ve Elastisite Modülü Hesabıfree37740Pas encore d'évaluation
- Kompozit Malzemelerin Test Metotlari Prof DR Bilsen Besergil PDFDocument200 pagesKompozit Malzemelerin Test Metotlari Prof DR Bilsen Besergil PDFselogokPas encore d'évaluation
- Nasıl Vinç Yaparım - M.Güven KutayDocument12 pagesNasıl Vinç Yaparım - M.Güven KutayUlasimuuPas encore d'évaluation
- Bitirme TeziDocument48 pagesBitirme TezialiceliktasarimPas encore d'évaluation
- Sonlu Elemanlar Metodu - Ahmet TOPÇU - 2Document152 pagesSonlu Elemanlar Metodu - Ahmet TOPÇU - 2Umut TuranPas encore d'évaluation
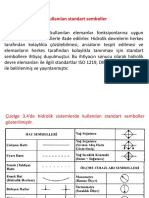
- Hidrolik Sistemlerde Kullanılan Standart Semboller Murat KoruDocument27 pagesHidrolik Sistemlerde Kullanılan Standart Semboller Murat KoruMehmet Akif Ersoy100% (1)
- 10a Yaylar PDFDocument81 pages10a Yaylar PDFkkkprot100% (1)
- Kompozit Malzemeler Ders NotlarıDocument97 pagesKompozit Malzemeler Ders NotlarıAbdulkadir ErogluPas encore d'évaluation
- Sayfa 104 107Document12 pagesSayfa 104 107alperenacar0% (1)
- Cup Anemometre KalibrasyonDocument8 pagesCup Anemometre KalibrasyonSüleyman Hilmi GülPas encore d'évaluation
- Electrical MotorDocument47 pagesElectrical MotordaywalkeryPas encore d'évaluation
- Stall İkaz Ve Önleme Sistemleri: Şekil 12.1. Kanat Üzerinde Stall Stripler Ve Oluşturduğu TürbülanslarDocument9 pagesStall İkaz Ve Önleme Sistemleri: Şekil 12.1. Kanat Üzerinde Stall Stripler Ve Oluşturduğu TürbülanslarDeniz YiğitPas encore d'évaluation
- Mekanik Titresimler Dersi 2Document34 pagesMekanik Titresimler Dersi 2asdasdadasPas encore d'évaluation
- Santri̇füj Pompalarin Boyutlandirilmasi Ve Çi̇zi̇mi̇Document28 pagesSantri̇füj Pompalarin Boyutlandirilmasi Ve Çi̇zi̇mi̇Merdingo Auditore da FirenzePas encore d'évaluation
- Mekanik Titresimler Ve Izolasyonu TeorikDocument9 pagesMekanik Titresimler Ve Izolasyonu TeorikBurla KasimPas encore d'évaluation
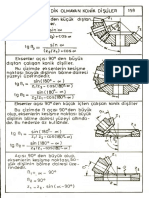
- Konik Disli Hesabi Eksen Acilari Dik Olmayan Konik DislilerDocument1 pageKonik Disli Hesabi Eksen Acilari Dik Olmayan Konik DislilerAhmet CoşkunPas encore d'évaluation
- Metal Mesleğinde TablolarDocument160 pagesMetal Mesleğinde TablolarBorga YurtPas encore d'évaluation
- Staj DefteriDocument45 pagesStaj DefteriHaNif'i KaraCaPas encore d'évaluation
- 41 00 Cel Kons Giris+ozetDocument51 pages41 00 Cel Kons Giris+ozetmsenerPas encore d'évaluation
- Taşıt Modeli PIDDocument20 pagesTaşıt Modeli PIDAhmet ÖzarslanPas encore d'évaluation
- Sozluk Turkce IngDocument28 pagesSozluk Turkce IngErcan KırıntılıPas encore d'évaluation
- TS 88 24 Iso 128 24Document20 pagesTS 88 24 Iso 128 24mehmet tekinPas encore d'évaluation
- 1 MKM 308 Makina Dinamigi GirisDocument46 pages1 MKM 308 Makina Dinamigi GirisMAHMOD SHERMOHAMMADPas encore d'évaluation
- TS 10465Document17 pagesTS 10465Selmin UsluPas encore d'évaluation
- Yeni Aks MilDocument31 pagesYeni Aks Milmehmetozer1905Pas encore d'évaluation
- Pekleşme KurallarıDocument20 pagesPekleşme KurallarıDenemePas encore d'évaluation
- Frenler SunumuDocument29 pagesFrenler SunumuasdasdresPas encore d'évaluation
- 10.hafta - YaylarDocument23 pages10.hafta - Yaylarbora berat demirPas encore d'évaluation
- Motor Çevrimleri Ve YakıtlarDocument138 pagesMotor Çevrimleri Ve YakıtlarAbdullah Tombak100% (1)
- Asenkron Motor Lard A V F Orani Tutularak Hiz AyariDocument32 pagesAsenkron Motor Lard A V F Orani Tutularak Hiz Ayarimehmet_altılıPas encore d'évaluation
- 3 FAZLI ASENKRON MOTOR Hız KontrolüDocument4 pages3 FAZLI ASENKRON MOTOR Hız KontrolüSayah SayaPas encore d'évaluation
- Asenkron Motorlar Hakkinda Genel BilgiDocument11 pagesAsenkron Motorlar Hakkinda Genel BilgiAhmet TuncaPas encore d'évaluation
- 10 Mfeem - 3010 257 286Document29 pages10 Mfeem - 3010 257 286Arda ŞenPas encore d'évaluation
- Asenkron Maki̇nalar - 2003Document40 pagesAsenkron Maki̇nalar - 2003Yusuf AlırPas encore d'évaluation