Vous aimerez peut-être aussi
- PowerPoint Minieolica - PPTDocument10 pagesPowerPoint Minieolica - PPTpaulino_albuque4979Pas encore d'évaluation
- Mi Hycad Portugues Exercicio RevUNIDODocument9 pagesMi Hycad Portugues Exercicio RevUNIDOpaulino_albuque4979Pas encore d'évaluation
- Tecnologia de RedesDocument74 pagesTecnologia de RedesMadaleno Pedro Vicente DalúPas encore d'évaluation
- Guía Didático de Energia EólicaDocument7 pagesGuía Didático de Energia EólicaThiago François Queiroz LefeburePas encore d'évaluation
- Dissertacao Jair MedeirosDocument159 pagesDissertacao Jair Medeirospaulino_albuque4979Pas encore d'évaluation
- 1756 - Programaçao Básica Control LogixDocument76 pages1756 - Programaçao Básica Control LogixMarcus Vinicius MenezesPas encore d'évaluation
- Tutorial Criar Ficheiro Audio PDFDocument15 pagesTutorial Criar Ficheiro Audio PDFpaulino_albuque4979Pas encore d'évaluation
- 2 - Métodos de DiscretizaçãoDocument18 pages2 - Métodos de DiscretizaçãoFabio SplendorPas encore d'évaluation
- Emprego Dos PorquêsDocument1 pageEmprego Dos Porquêspaulino_albuque4979Pas encore d'évaluation
- Apostila MATLABDocument66 pagesApostila MATLABLucas Maldonado MorenoPas encore d'évaluation
- Tutorial Criar Ficheiro Audio PDFDocument15 pagesTutorial Criar Ficheiro Audio PDFpaulino_albuque4979Pas encore d'évaluation
- Ementas Curso de Analise e Desenv SistemasDocument31 pagesEmentas Curso de Analise e Desenv Sistemaspauloxisto100% (1)
- Aula 05Document61 pagesAula 05Marcos TerezanPas encore d'évaluation
- Salário de EngenheirosDocument7 pagesSalário de EngenheirosfernandotinhoPas encore d'évaluation
- Salário de EngenheirosDocument7 pagesSalário de EngenheirosfernandotinhoPas encore d'évaluation
- Esquema Geral Cursos EfaDocument50 pagesEsquema Geral Cursos EfaJose GalasPas encore d'évaluation
- Guia de Identificação Das Pastagens Nativas Do Pantanal (2019)Document223 pagesGuia de Identificação Das Pastagens Nativas Do Pantanal (2019)Andreia CostaPas encore d'évaluation
- Vasos de BarroDocument5 pagesVasos de BarroDaniel Sipriano NetoPas encore d'évaluation
- Proteção de Sistemas PDFDocument23 pagesProteção de Sistemas PDFRafael De Lima Gabardo100% (1)
- Cartilha FNS - Acesso A Recursos Da Saúde 2022Document166 pagesCartilha FNS - Acesso A Recursos Da Saúde 2022vieiraianaPas encore d'évaluation
- Yago CastroDocument21 pagesYago CastroYago CastroPas encore d'évaluation
- A Perdida Arte Da DatilografiaDocument4 pagesA Perdida Arte Da DatilografiaPatricia GomesPas encore d'évaluation
- Óquio: Istema Etro ErroviárioDocument96 pagesÓquio: Istema Etro ErroviárioJLPas encore d'évaluation
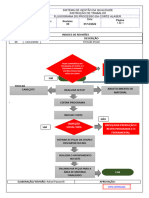
- 10 FLUXO CORTE LASER - Revisado 21-07-2020Document1 page10 FLUXO CORTE LASER - Revisado 21-07-2020Rafael PassarelliPas encore d'évaluation
- Classificacao Geral Vestibular UeaDocument991 pagesClassificacao Geral Vestibular UeamartinselanildaPas encore d'évaluation
- Endometriose 2021Document16 pagesEndometriose 2021Nathalia Vasconcelos Barroso Todt AragãoPas encore d'évaluation
- Relatório de Levantamento MaterialDocument2 pagesRelatório de Levantamento MaterialHeltonsubrg SystemPas encore d'évaluation
- Ficha Rakan (ATUAL)Document3 pagesFicha Rakan (ATUAL)Fiky ColdPas encore d'évaluation
- Programa de Hipertrofia Feminina GRATIS Nivel 1 MescladoDocument11 pagesPrograma de Hipertrofia Feminina GRATIS Nivel 1 MescladoCasa na VilaPas encore d'évaluation
- Regência Nominal Na Construção Do Texto.Document25 pagesRegência Nominal Na Construção Do Texto.carlosjanssenrs100% (1)
- BOVINOCULTURADocument85 pagesBOVINOCULTURAJuliana MouraPas encore d'évaluation
- Requisição de PessoalDocument2 pagesRequisição de PessoalComa Bem RefeiçõesPas encore d'évaluation
- Noção Intuitiva de LimitesDocument14 pagesNoção Intuitiva de LimitesThayla CastroPas encore d'évaluation
- 2017 - Producao Textual-6oAno - Etapa02 Fábulas, Apólogos, Contos Maravilhosos Prova e GabaritoDocument8 pages2017 - Producao Textual-6oAno - Etapa02 Fábulas, Apólogos, Contos Maravilhosos Prova e GabaritoRosimere BritoPas encore d'évaluation
- AutoP03158216425 PDFDocument1 pageAutoP03158216425 PDFwitalo taveiraPas encore d'évaluation
- Moldes - Chapeu de MarinheiroDocument3 pagesMoldes - Chapeu de Marinheiroph mixPas encore d'évaluation
- F10 Hfen11 em Guia Prof Resumo Al 10anoDocument3 pagesF10 Hfen11 em Guia Prof Resumo Al 10anoCatarina StelmashchukPas encore d'évaluation
- Sas2018 4Document17 pagesSas2018 4jgabrielcdaviPas encore d'évaluation
- ANIM-012 - Manual Tosa Cocker SpanielDocument15 pagesANIM-012 - Manual Tosa Cocker SpanielMarcos CelestinoPas encore d'évaluation
- Prova Teorica NR 06Document2 pagesProva Teorica NR 06Lih AssisPas encore d'évaluation
- Proced Criar NOVA CONTA No FusionSolar MONODocument4 pagesProced Criar NOVA CONTA No FusionSolar MONOCharles CardosoPas encore d'évaluation
- Apreciação CríticaDocument1 pageApreciação CríticaSílvia OliveiraPas encore d'évaluation
- BudaKamakura PDFDocument16 pagesBudaKamakura PDFjuniorterapiaPas encore d'évaluation
- AD1Música 2021.2 CEDERJ UNIRIO PEDAGOGIADocument5 pagesAD1Música 2021.2 CEDERJ UNIRIO PEDAGOGIAMaria da Conceição SilvaPas encore d'évaluation
- Guia Local v1810 - CE Crateus - 06-11-2018Document22 pagesGuia Local v1810 - CE Crateus - 06-11-2018Marcelo ClaroPas encore d'évaluation