Vous aimerez peut-être aussi
- Detección de Problemas en El Hardware Del PCDocument22 pagesDetección de Problemas en El Hardware Del PCDairony100% (3)
- La Biblia de Mysql-Anaya Multimedia PDFDocument841 pagesLa Biblia de Mysql-Anaya Multimedia PDFteacherliz100% (2)
- Cálculo de enlace satelital: atenuación, PIRE y tamaño de antenaDocument13 pagesCálculo de enlace satelital: atenuación, PIRE y tamaño de antenaRainer Rodriguez FLores100% (1)
- MetodologiaDocument66 pagesMetodologiauriel gomez100% (1)
- Cheng Capitulo 7v2Document67 pagesCheng Capitulo 7v2Pedro Andrade100% (1)
- Control LED Arduino con ProcessingDocument59 pagesControl LED Arduino con ProcessingJaime BarraganPas encore d'évaluation
- Manual Desarrollo de Aplicaciones Moviles 1Document158 pagesManual Desarrollo de Aplicaciones Moviles 1Javier Raffo Huaman100% (1)
- Software para El Desarrollo de Aplicaciones Orientada A ObjetosDocument4 pagesSoftware para El Desarrollo de Aplicaciones Orientada A ObjetosOrozco Escalante Karla100% (1)
- Practica Configuracion AsistenteDocument1 pagePractica Configuracion Asistenterg_013Pas encore d'évaluation
- Distancia Azimuth ADocument3 pagesDistancia Azimuth APedro AndradePas encore d'évaluation
- 1 SEO en Pinterest para Aumentar TráficoDocument3 pages1 SEO en Pinterest para Aumentar TráficoPedro AndradePas encore d'évaluation
- 2 Cómo Afrontar Una Estrategia SEO en El 2015Document7 pages2 Cómo Afrontar Una Estrategia SEO en El 2015Roger Reyes BolañosPas encore d'évaluation
- Capítulo 4 SeyboldDocument12 pagesCapítulo 4 SeyboldPedro AndradePas encore d'évaluation
- Clase 2Document17 pagesClase 2Pedro AndradePas encore d'évaluation
- Git ManualDocument40 pagesGit ManualMelina CIsnerosPas encore d'évaluation
- Ficha Tecnica Comprobantes Electrónicos Esquema OfflineDocument111 pagesFicha Tecnica Comprobantes Electrónicos Esquema OfflineLider AndradePas encore d'évaluation
- Ficha Tecnica Comprobantes Electrónicos Esquema OfflineDocument111 pagesFicha Tecnica Comprobantes Electrónicos Esquema OfflineLider AndradePas encore d'évaluation
- Par TrenzadoDocument7 pagesPar TrenzadoPedro AndradePas encore d'évaluation
- Acuerdo Ministerial 029 Norma TecnicaDocument167 pagesAcuerdo Ministerial 029 Norma TecnicaPedro AndradePas encore d'évaluation
- Plan de Gestion para La Construccion de Un Complejo de Condominios en Manuel AntonioDocument151 pagesPlan de Gestion para La Construccion de Un Complejo de Condominios en Manuel AntonioJavier AlvarezPas encore d'évaluation
- Índice Estego PDFDocument4 pagesÍndice Estego PDFPedro AndradePas encore d'évaluation
- FormularioDocument2 pagesFormularioPedro AndradePas encore d'évaluation
- Coordenadas de Los Cerros-SUPERTELDocument5 pagesCoordenadas de Los Cerros-SUPERTELJuan ParedesPas encore d'évaluation
- Distancia Azimuth ADocument3 pagesDistancia Azimuth APedro AndradePas encore d'évaluation
- Prueba Teoria ElectromagneticaDocument13 pagesPrueba Teoria ElectromagneticaPedro AndradePas encore d'évaluation
- Onda de EspacioDocument12 pagesOnda de EspacioPedro AndradePas encore d'évaluation
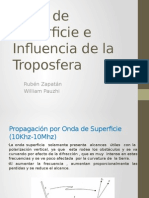
- Onda SuperficieDocument16 pagesOnda SuperficiePedro AndradePas encore d'évaluation
- EjeciciossDocument13 pagesEjeciciossBismarck CarrionPas encore d'évaluation
- Mercados de Factores y La Distribucion de LaDocument35 pagesMercados de Factores y La Distribucion de LaPedro AndradePas encore d'évaluation
- Arduino Apuntes 2013Document35 pagesArduino Apuntes 2013Roberto C Ruiz100% (1)
- Cazadores primitivos: organización y estrategias de cazaDocument1 pageCazadores primitivos: organización y estrategias de cazaPedro AndradePas encore d'évaluation
- Practicas ElectrohidraulicaDocument2 pagesPracticas ElectrohidraulicaPedro AndradePas encore d'évaluation
- Examen Automatizacion 2 UPSDocument2 pagesExamen Automatizacion 2 UPSPedro AndradePas encore d'évaluation
- Estructuras SecuencialesDocument10 pagesEstructuras SecuencialesJüan RojasPas encore d'évaluation
- Captura Basicas de CadenasDocument2 pagesCaptura Basicas de CadenasSaul EspinozaPas encore d'évaluation
- Comandos de Visual Fox Pro en Wrod 1Document7 pagesComandos de Visual Fox Pro en Wrod 1Charito ArangoPas encore d'évaluation
- Graficadores LabviewDocument15 pagesGraficadores LabviewJosé Luis Guzmán Sandoval100% (1)
- Trabajo: Diferencias y Similitudes Entre Eclipse y NetBeansDocument4 pagesTrabajo: Diferencias y Similitudes Entre Eclipse y NetBeansJose CruzadoPas encore d'évaluation
- Informe Proyecto de ProgramacionDocument12 pagesInforme Proyecto de ProgramacionMalena PerazaPas encore d'évaluation
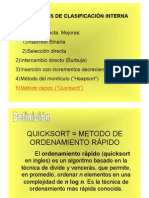
- Transparencias Del Método de Clasificación QuicksortDocument16 pagesTransparencias Del Método de Clasificación QuicksortantoniobecerrateronPas encore d'évaluation
- Marco TeóricoDocument3 pagesMarco Teóricojair eduardo mendez gonzalesPas encore d'évaluation
- Prolog ListasDocument8 pagesProlog ListasGersan Antonio Alduvin AguilarPas encore d'évaluation
- Ensayo Datasheet PIC 16F877Document5 pagesEnsayo Datasheet PIC 16F877Santiago CorreaPas encore d'évaluation
- Es ENetwork SLM v40 PDFDocument310 pagesEs ENetwork SLM v40 PDFGuissela RomeroPas encore d'évaluation
- Modelos matemáticos para estimar costos de mantenimientoDocument14 pagesModelos matemáticos para estimar costos de mantenimientoJuan Jose Perez MondragonPas encore d'évaluation
- Historia de Los Sistemas OperativosDocument12 pagesHistoria de Los Sistemas OperativosErick SaavedraPas encore d'évaluation
- Técnicas Avanzadas de MaldocDocument2 pagesTécnicas Avanzadas de MaldoccomPas encore d'évaluation
- Redes Domestica FimeDocument2 pagesRedes Domestica Fimeyovanni Martinez LicapaPas encore d'évaluation
- Sistema de inventario Hulk Store con JavaDocument1 pageSistema de inventario Hulk Store con JavaJose FelixPas encore d'évaluation
- E R ExtendidoDocument12 pagesE R ExtendidoDanny Martínez LópezPas encore d'évaluation
- ApuntesdeprogramaciondelantDocument64 pagesApuntesdeprogramaciondelantIvan Garcia PancorboPas encore d'évaluation
- Comandos TelnetDocument2 pagesComandos TelnetFrancisco VargasPas encore d'évaluation
- Comandos Básicos de UnixDocument3 pagesComandos Básicos de UnixJuan Carlos LeonPas encore d'évaluation
- Convertir Desde Formatos .CDR A .SVG en GNU/LinuxDocument7 pagesConvertir Desde Formatos .CDR A .SVG en GNU/LinuxLeonardo J. Caballero G.Pas encore d'évaluation
- 8 Herramientas Ticketing Open Source HelpdesksDocument19 pages8 Herramientas Ticketing Open Source HelpdesksWillian PillagaPas encore d'évaluation
- Sistema de Tiempo RealDocument5 pagesSistema de Tiempo RealAndrea MyersPas encore d'évaluation
- Sistemas Operativos y TraductoresDocument5 pagesSistemas Operativos y TraductoresrudavalosPas encore d'évaluation
- Qué Es UNIXDocument4 pagesQué Es UNIXnahun diazPas encore d'évaluation
- Historia de La Memoria RamDocument3 pagesHistoria de La Memoria RamAndres Felipe Castro MonsalvePas encore d'évaluation