Vous aimerez peut-être aussi
- Power Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesD'EverandPower Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesPas encore d'évaluation
- A Review On Active Power Electronic TransformerDocument7 pagesA Review On Active Power Electronic TransformerYamini ChauhanPas encore d'évaluation
- Power Electronic TransformerDocument61 pagesPower Electronic TransformerMahidhar Talapaneni100% (2)
- Power TransformersDocument5 pagesPower TransformersBahaa M NadaPas encore d'évaluation
- Analysis of Current Doubler Rectifier Based High Frequency Isolation Stage For Intelligent TransformerDocument6 pagesAnalysis of Current Doubler Rectifier Based High Frequency Isolation Stage For Intelligent Transformerjeos20132013Pas encore d'évaluation
- Electrical Systems and Power Electronics For Aircraft ApplicationsDocument16 pagesElectrical Systems and Power Electronics For Aircraft ApplicationsJulian ManiboPas encore d'évaluation
- Analysis and Design of Power Electronic Transformer For Medium Voltage LevelsDocument5 pagesAnalysis and Design of Power Electronic Transformer For Medium Voltage LevelsSobia SaadiaPas encore d'évaluation
- A Novel Multicell DC-AC Converter For Applications in Renewable Energy SystemsDocument10 pagesA Novel Multicell DC-AC Converter For Applications in Renewable Energy SystemsJie99Pas encore d'évaluation
- Power-Electronics Ktuonline - in PDFDocument68 pagesPower-Electronics Ktuonline - in PDFchippyviswanPas encore d'évaluation
- A Report On Mosfet BasedDocument30 pagesA Report On Mosfet Baseddinesh23723100% (1)
- DC DC ConvertorDocument6 pagesDC DC ConvertorFlorin CristiPas encore d'évaluation
- Estudo CapacitorDocument9 pagesEstudo Capacitorsajo1000Pas encore d'évaluation
- Project Description Block DiagramDocument55 pagesProject Description Block DiagramAnonymous f9RU7fiPas encore d'évaluation
- Power Enhance Technics-Cpe13Document204 pagesPower Enhance Technics-Cpe13Sarath Chandra VPas encore d'évaluation
- Power System Analysis Lab Equipments: ObjectiveDocument12 pagesPower System Analysis Lab Equipments: Objectiveayesha amjadPas encore d'évaluation
- Selected Applications of The Mosfets in Ac-Dc Rectifier Sys-TemsDocument7 pagesSelected Applications of The Mosfets in Ac-Dc Rectifier Sys-TemsFaris MatPas encore d'évaluation
- The Research On Special Electronic Power TransformDocument10 pagesThe Research On Special Electronic Power TransformAnshul GargPas encore d'évaluation
- Project Description Block DiagramDocument50 pagesProject Description Block DiagramRamalingam ShanmugamPas encore d'évaluation
- Current TransformerDocument22 pagesCurrent TransformerSaji S Sajivv100% (1)
- Wireless Power System For Implantable Heart Pumps Based On Energy Injection ControlDocument5 pagesWireless Power System For Implantable Heart Pumps Based On Energy Injection ControlkeplanPas encore d'évaluation
- What Is The Power ElectronicsDocument16 pagesWhat Is The Power ElectronicsashammoudaPas encore d'évaluation
- Sem ReportDocument38 pagesSem ReportSafalsha BabuPas encore d'évaluation
- 1000w Inverter PURE SINE WAVE Schematic DiagramDocument153 pages1000w Inverter PURE SINE WAVE Schematic Diagramjeevapillay100% (4)
- Switched Mode Power SupplyDocument153 pagesSwitched Mode Power SupplyIvan222244Pas encore d'évaluation
- Switched Mode Power SupplyDocument10 pagesSwitched Mode Power SupplySukhminder WaliaPas encore d'évaluation
- UppclDocument25 pagesUppclNARENDRA YADAVPas encore d'évaluation
- CSPDCL, BHILAI (2012-2013) : MemorandumDocument14 pagesCSPDCL, BHILAI (2012-2013) : MemorandumAshish MauryaPas encore d'évaluation
- Power Supplies Module 03Document20 pagesPower Supplies Module 03LeonardoXanMPas encore d'évaluation
- Has High Efficiency. Fault Current Is Limited by The Inductor Output Short Circuit Current Is Easy To ImplementDocument6 pagesHas High Efficiency. Fault Current Is Limited by The Inductor Output Short Circuit Current Is Easy To ImplementRajalakshmi ShivakumarPas encore d'évaluation
- Practical Evaluations of Single-Ended Load-Resonant InverterDocument7 pagesPractical Evaluations of Single-Ended Load-Resonant InverterkarnatisharathPas encore d'évaluation
- Modul 9 Mesin Listrik 1 PDFDocument22 pagesModul 9 Mesin Listrik 1 PDFaswardiPas encore d'évaluation
- IEEE POWER ELECTRONICS 2015 Matlab Projectlist Mtech BeDocument4 pagesIEEE POWER ELECTRONICS 2015 Matlab Projectlist Mtech BeKumar RajPas encore d'évaluation
- Grid Station Report of Internship at IESCO: 2.4.1.2.3. Auto TransformersDocument5 pagesGrid Station Report of Internship at IESCO: 2.4.1.2.3. Auto TransformersMuhammad Asif IqbalPas encore d'évaluation
- TRANSFORMERDocument2 pagesTRANSFORMERsorianoaldrine99Pas encore d'évaluation
- Ijet V2i2p17Document9 pagesIjet V2i2p17International Journal of Engineering and TechniquesPas encore d'évaluation
- Assignment 2: Advanced Power ElectronicsDocument7 pagesAssignment 2: Advanced Power ElectronicsSourabh SenPas encore d'évaluation
- AJ4852Document9 pagesAJ4852Kalveer HunasikattimathPas encore d'évaluation
- Nergy Conversions: University of TechnologyDocument9 pagesNergy Conversions: University of TechnologyFadhil A. HasanPas encore d'évaluation
- 225 230, Tesma410, IJEASTDocument6 pages225 230, Tesma410, IJEASTAkram KareemPas encore d'évaluation
- Xpaper 10 PDFDocument7 pagesXpaper 10 PDFYamini ChauhanPas encore d'évaluation
- Performance of A Current-Fed Soft Switched Full-Bridge Boost Double Stage Converter Using ZVS PWMDocument8 pagesPerformance of A Current-Fed Soft Switched Full-Bridge Boost Double Stage Converter Using ZVS PWMiajerPas encore d'évaluation
- Versatile Power SupplyDocument23 pagesVersatile Power SupplyPrashant BijwePas encore d'évaluation
- IET Power Electronics Volume 4 Issue 9 2011 [Doi 10.1049_iet-Pel.2010.0363] Jung, J.-h.; Ahmed, S. -- Flyback Converter With Novel Active Clamp Control and Secondary Side Post Regulator for Low Standby Power Consumption Under HighDocument10 pagesIET Power Electronics Volume 4 Issue 9 2011 [Doi 10.1049_iet-Pel.2010.0363] Jung, J.-h.; Ahmed, S. -- Flyback Converter With Novel Active Clamp Control and Secondary Side Post Regulator for Low Standby Power Consumption Under HighTuấn Anh PhạmPas encore d'évaluation
- Dubex Semina ProposalDocument18 pagesDubex Semina Proposalannamichelle1001Pas encore d'évaluation
- FPE Micro-ProjectDocument21 pagesFPE Micro-ProjectHarsh PatilPas encore d'évaluation
- 4029INSTRUMENTTRANSFORMERSDocument95 pages4029INSTRUMENTTRANSFORMERSmuaz_aminu1422100% (2)
- Transformerless H6D2 InverterDocument47 pagesTransformerless H6D2 InverterPinnam MallikarjunaPas encore d'évaluation
- Electric CalDocument20 pagesElectric CalRisky RiyanshPas encore d'évaluation
- Report On Power SupplyDocument14 pagesReport On Power SupplyBhavesh MaheshwariPas encore d'évaluation
- INSTRUMENTTRANSFORMERSDocument95 pagesINSTRUMENTTRANSFORMERSmuaz_aminu1422Pas encore d'évaluation
- Power Inverter - Wikipedia, The Free EncyclopediaDocument5 pagesPower Inverter - Wikipedia, The Free EncyclopediaSubbaReddyPas encore d'évaluation
- Methods for Increasing the Quality and Reliability of Power System Using FACTS DevicesD'EverandMethods for Increasing the Quality and Reliability of Power System Using FACTS DevicesPas encore d'évaluation
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2D'EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Pas encore d'évaluation
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1D'EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Évaluation : 2.5 sur 5 étoiles2.5/5 (3)
- Introduction to Power System ProtectionD'EverandIntroduction to Power System ProtectionPas encore d'évaluation
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlD'EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlÉvaluation : 5 sur 5 étoiles5/5 (1)
- Empowering Networks: A Comprehensive Guide to Medium Voltage SwitchgearD'EverandEmpowering Networks: A Comprehensive Guide to Medium Voltage SwitchgearPas encore d'évaluation
- Introduction to Power System ProtectionD'EverandIntroduction to Power System ProtectionÉvaluation : 5 sur 5 étoiles5/5 (1)
- Power Electronics and Energy Conversion Systems, Fundamentals and Hard-switching ConvertersD'EverandPower Electronics and Energy Conversion Systems, Fundamentals and Hard-switching ConvertersPas encore d'évaluation
- Mathematics in The Modern World: Course No. Course Title Dean's InformationDocument5 pagesMathematics in The Modern World: Course No. Course Title Dean's InformationJayson SantelicesPas encore d'évaluation
- S/Mime (Secure/Multipurpose Internet Mail Extensions)Document15 pagesS/Mime (Secure/Multipurpose Internet Mail Extensions)Vishnupriya100% (1)
- Transformation To An Agile and Virtualized World: Operations Center of The FutureDocument1 pageTransformation To An Agile and Virtualized World: Operations Center of The FuturepinardoPas encore d'évaluation
- Visvesvaraya Technological University: "Dijkstra'S Algorithm"Document34 pagesVisvesvaraya Technological University: "Dijkstra'S Algorithm"RASHMIPas encore d'évaluation
- Electricity: ElectromagnetsDocument17 pagesElectricity: ElectromagnetsAyushJaiswalPas encore d'évaluation
- Formula SheetDocument3 pagesFormula SheetgogogogoPas encore d'évaluation
- Introduction To Shadowgraph and Schlieren Imaging: RIT Scholar WorksDocument59 pagesIntroduction To Shadowgraph and Schlieren Imaging: RIT Scholar WorksAnmar HamidPas encore d'évaluation
- AN17825ADocument8 pagesAN17825AJose M PeresPas encore d'évaluation
- Soil Mechanics PowerpointDocument239 pagesSoil Mechanics PowerpointEdcel Angelo TomasPas encore d'évaluation
- MB-339A User ManualDocument196 pagesMB-339A User Manualkepakko75% (4)
- Supercritical CO2: Properties and Technological Applications - A ReviewDocument38 pagesSupercritical CO2: Properties and Technological Applications - A ReviewXuân ĐứcPas encore d'évaluation
- GGDocument8 pagesGGGaurav SharmaPas encore d'évaluation
- SDS-PAGE PrincipleDocument2 pagesSDS-PAGE PrincipledhashrathPas encore d'évaluation
- Image Processing Math Prob1Document13 pagesImage Processing Math Prob1MunmunPas encore d'évaluation
- LRL 1220 DDocument6 pagesLRL 1220 DDEShifPas encore d'évaluation
- MagPi70 PDFDocument100 pagesMagPi70 PDFDaniel TuarezPas encore d'évaluation
- "Fabrication of Impact Testing Machine": Diploma in Mechanical Engineering ProgrammeDocument59 pages"Fabrication of Impact Testing Machine": Diploma in Mechanical Engineering ProgrammemanjaPas encore d'évaluation
- EX - NO:1a Data Definition Languages (DDL) Commands of Base Tables and ViewsDocument44 pagesEX - NO:1a Data Definition Languages (DDL) Commands of Base Tables and Viewslalit thakur100% (1)
- GTG Centaur 50 TurbomachineryDocument86 pagesGTG Centaur 50 TurbomachineryAlfian Aditya100% (3)
- Structural Design and Optimization - Part IIDocument448 pagesStructural Design and Optimization - Part IIFranco Bontempi100% (1)
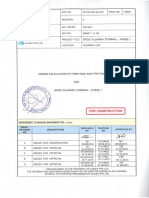
- 20-F201007-SC-010 R0 - Design Calculation of Foam Tank and Fire Pump ShedDocument187 pages20-F201007-SC-010 R0 - Design Calculation of Foam Tank and Fire Pump ShedSaravan KumarPas encore d'évaluation
- Abb Sas GeneralDocument43 pagesAbb Sas Generalsabill arasyidPas encore d'évaluation
- Corirubber: Cori Engineers Private LimitedDocument1 pageCorirubber: Cori Engineers Private LimitedVivace SystmPas encore d'évaluation
- Design and Simulation of A QCA 2 To 1 MultiplexerDocument5 pagesDesign and Simulation of A QCA 2 To 1 MultiplexerzubifayazPas encore d'évaluation
- The Equation of The Straight Line: y MX CDocument6 pagesThe Equation of The Straight Line: y MX CMarc SugruePas encore d'évaluation
- Tutorial On Setting Up OpenERP 6.1Document35 pagesTutorial On Setting Up OpenERP 6.1aryiennePas encore d'évaluation
- 1001451317230Document12 pages1001451317230JulioEdgarHanccoZeaPas encore d'évaluation
- Hydraulic Structure - 16 - 30 - FianalDocument26 pagesHydraulic Structure - 16 - 30 - FianalMahmood YounsPas encore d'évaluation
- S3 3 TrigonometryDocument81 pagesS3 3 TrigonometryEugene ChoongPas encore d'évaluation
- Oracle Process Manufacturing Master SetupsDocument42 pagesOracle Process Manufacturing Master SetupsMadhuri Uppala100% (2)










































![IET Power Electronics Volume 4 Issue 9 2011 [Doi 10.1049_iet-Pel.2010.0363] Jung, J.-h.; Ahmed, S. -- Flyback Converter With Novel Active Clamp Control and Secondary Side Post Regulator for Low Standby Power Consumption Under High](https://imgv2-1-f.scribdassets.com/img/document/220209509/149x198/8baf096670/1429428106?v=1)