Vous aimerez peut-être aussi
- Introduction To Introduction To Computer Numerical Control: Computer Aided Manufacturing TECH 4/53350 1Document11 pagesIntroduction To Introduction To Computer Numerical Control: Computer Aided Manufacturing TECH 4/53350 1BabuRaoThellaPas encore d'évaluation
- Post Test Praktikum8Document14 pagesPost Test Praktikum8MHNDRPRTMA ACTRYPas encore d'évaluation
- Adaptive Control Theory: Direct Self-Tuning Regulators and Internal ModelDocument27 pagesAdaptive Control Theory: Direct Self-Tuning Regulators and Internal ModelThanh NguyenPas encore d'évaluation
- Start: Static Input Data (Beltanalyst™)Document8 pagesStart: Static Input Data (Beltanalyst™)Erlan OlveiraPas encore d'évaluation
- Pukor 11-049e Priced Gsec Pdvsa Gas-Mega-Project 11058a-In-12 (P)Document43 pagesPukor 11-049e Priced Gsec Pdvsa Gas-Mega-Project 11058a-In-12 (P)avaisharmaPas encore d'évaluation
- Fluid Mechanics Ii: ContentsDocument9 pagesFluid Mechanics Ii: ContentsMahmoudPas encore d'évaluation
- Using Tensorflow To Predict Jet Numbers in Cern Proton Collisions (Evaluator-Omid-Baghcheh-Saraei)Document29 pagesUsing Tensorflow To Predict Jet Numbers in Cern Proton Collisions (Evaluator-Omid-Baghcheh-Saraei)David EsparzaArellanoPas encore d'évaluation
- Submission of Term Work': Subject - CpmsDocument25 pagesSubmission of Term Work': Subject - CpmsPrakharPas encore d'évaluation
- C PDFDocument23 pagesC PDFTATATAHERPas encore d'évaluation
- MPT BL Bayesian PDFDocument112 pagesMPT BL Bayesian PDFyuzukiebaPas encore d'évaluation
- Wind load calc O2 reactorDocument5 pagesWind load calc O2 reactormechmohan26Pas encore d'évaluation
- Simulating complex reaction kineticsDocument40 pagesSimulating complex reaction kineticsShahid Z AnsariPas encore d'évaluation
- Okuma Lathe ManualDocument23 pagesOkuma Lathe ManualWong Lee QinPas encore d'évaluation
- The University of Asia Pacific: DC Power Supply 2Document4 pagesThe University of Asia Pacific: DC Power Supply 2sabitavabiPas encore d'évaluation
- Hemi - 521 Restored - MRDocument8 pagesHemi - 521 Restored - MRMiftah HudaPas encore d'évaluation
- Ammar 142014096 Kode4Document45 pagesAmmar 142014096 Kode4Ammar ZakyPas encore d'évaluation
- Exercises 2 UnfinishedDocument8 pagesExercises 2 UnfinishedRio Zain DeogratiasPas encore d'évaluation
- Blueline 3 Belt Drive Slide: Product Finder Home PageDocument6 pagesBlueline 3 Belt Drive Slide: Product Finder Home PageawemetalPas encore d'évaluation
- Binder 1sdfDocument6 pagesBinder 1sdfAnonymous 5qIKYtPas encore d'évaluation
- MATLAB Desktop Keyboard ShortcutsDocument19 pagesMATLAB Desktop Keyboard ShortcutsJuan GomezPas encore d'évaluation
- Natural Gas Pipe Sizing SectionDocument12 pagesNatural Gas Pipe Sizing SectiondpaoluccPas encore d'évaluation
- Parte 1. Problemas Sobre Tema 2.: Unrecognized Function or Variable 'B'Document10 pagesParte 1. Problemas Sobre Tema 2.: Unrecognized Function or Variable 'B'EMILIO RODRIGUEZ CALDERONPas encore d'évaluation
- AR Model Session2 Output: Install - Packages ("Forecast")Document30 pagesAR Model Session2 Output: Install - Packages ("Forecast")karthikmaddula007_66Pas encore d'évaluation
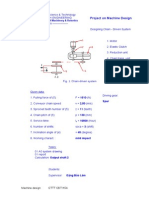
- Machine Design ProjectDocument10 pagesMachine Design ProjectĐỗ Tất ThànhPas encore d'évaluation
- Question Bank: Prist UniversityDocument5 pagesQuestion Bank: Prist Universitykarthik_1977Pas encore d'évaluation
- Reg CDocument43 pagesReg CsarvanmePas encore d'évaluation
- DCS Lab 7 Report (Zain, Umer, Abdullah)Document10 pagesDCS Lab 7 Report (Zain, Umer, Abdullah)Muhammad UmerPas encore d'évaluation
- Wind Energy Preparation 06 Aerodynamics QuizDocument10 pagesWind Energy Preparation 06 Aerodynamics QuizPedro Galvani67% (9)
- Automizing The Design of Francis Turbine Spiral CaseDocument10 pagesAutomizing The Design of Francis Turbine Spiral CaseGökhan ÇiçekPas encore d'évaluation
- ME 581 - Spring 2014 Web Cutter SimulationDocument8 pagesME 581 - Spring 2014 Web Cutter SimulationBlackyPBoatPas encore d'évaluation
- Morphing BlDE FinalDocument21 pagesMorphing BlDE FinalSoumian NarayananPas encore d'évaluation
- API Drill Pipe Specs-1Document26 pagesAPI Drill Pipe Specs-1SACHIN H. DHAMAPURKARPas encore d'évaluation
- All "Data - DC - 2021.xlsx" "A1:A30" "Data - DC - 2021.xlsx" "R1:R30"Document8 pagesAll "Data - DC - 2021.xlsx" "A1:A30" "Data - DC - 2021.xlsx" "R1:R30"Saikat AdhikaryPas encore d'évaluation
- ZF2 Belt Drive Slide: Product Finder Home PageDocument6 pagesZF2 Belt Drive Slide: Product Finder Home PageawemetalPas encore d'évaluation
- Modelado Molecular Modeller T16Document25 pagesModelado Molecular Modeller T16Flor AmarillaPas encore d'évaluation
- Two-Stage Least Squares Estimation ModelDocument13 pagesTwo-Stage Least Squares Estimation ModelCandy SuaybaguioPas encore d'évaluation
- Duct Static Pressure Loss CalculationDocument8 pagesDuct Static Pressure Loss CalculationYe Thiha Min100% (2)
- CW4 Design of vertical and horizontal tail sizingDocument2 pagesCW4 Design of vertical and horizontal tail sizingStan PPas encore d'évaluation
- Mediacharge TrajectoriesDocument8 pagesMediacharge TrajectoriesRolando QuispePas encore d'évaluation
- End Sem External EddelDocument7 pagesEnd Sem External EddelRAHULPas encore d'évaluation
- Handbook EngineerDocument232 pagesHandbook EngineerHendro Suratno100% (1)
- 04 SpeedControlDocument5 pages04 SpeedControlAngel ChicchonPas encore d'évaluation
- MATLAB Command HistoryDocument497 pagesMATLAB Command HistoryRiyadh AbdullaPas encore d'évaluation
- DRILL JIG (Final One)Document21 pagesDRILL JIG (Final One)Varshasonawane962Pas encore d'évaluation
- Lab 3 ReportDocument33 pagesLab 3 ReportdasdasdPas encore d'évaluation
- HPC MPI LAB 2 Vector AdditionDocument9 pagesHPC MPI LAB 2 Vector AdditionMridul HarishPas encore d'évaluation
- Bai Bao Nuoc Ngoai Truoc TS 04Document5 pagesBai Bao Nuoc Ngoai Truoc TS 04EL NeidPas encore d'évaluation
- Equalizer Design ExampleDocument10 pagesEqualizer Design ExamplehaimanhptitPas encore d'évaluation
- T Stack Rev00 CDRDocument47 pagesT Stack Rev00 CDRBabu RajamanickamPas encore d'évaluation
- Helical Gear Calculation Using SoftwareDocument10 pagesHelical Gear Calculation Using SoftwareM036Pas encore d'évaluation
- Perencanaan dan Pengendalian Produksi dengan Teknik PeramalanDocument42 pagesPerencanaan dan Pengendalian Produksi dengan Teknik PeramalanarivvvvvvPas encore d'évaluation
- Pid Loop SimulatorDocument9 pagesPid Loop SimulatorCarlos VidelaPas encore d'évaluation
- 5 - G-CodeDocument55 pages5 - G-CodefamilyumaPas encore d'évaluation
- Duct System Pressure Drop CalculationDocument11 pagesDuct System Pressure Drop CalculationSam Jose100% (1)
- Project Guide L2330HMDocument274 pagesProject Guide L2330HMLeonidas Galanis100% (1)
- Ed - All - D - DetailDocument40 pagesEd - All - D - DetailWahyu Norcahyo100% (2)
- Department of Electrical and Electronics Engineering: Lab ManualDocument53 pagesDepartment of Electrical and Electronics Engineering: Lab ManualgdeepthiPas encore d'évaluation
- Semi-Active Suspension Control Design for VehiclesD'EverandSemi-Active Suspension Control Design for VehiclesÉvaluation : 5 sur 5 étoiles5/5 (1)
- Diffuse Algorithms for Neural and Neuro-Fuzzy Networks: With Applications in Control Engineering and Signal ProcessingD'EverandDiffuse Algorithms for Neural and Neuro-Fuzzy Networks: With Applications in Control Engineering and Signal ProcessingPas encore d'évaluation
- Announcement: Inter-And Intra-Sectoral Dynamics For Transforming Indian AgricultureDocument8 pagesAnnouncement: Inter-And Intra-Sectoral Dynamics For Transforming Indian AgricultureEnamul HaquePas encore d'évaluation
- Antigua and Barbuda, Build Free Back LinksDocument7 pagesAntigua and Barbuda, Build Free Back LinkswaPas encore d'évaluation
- QSK60 G6 PDFDocument2 pagesQSK60 G6 PDFShahzad Ali100% (2)
- 02 Takaful CREDIT & DEBIT CARD AUTOPAY Authorization Form V1.0 2018Document2 pages02 Takaful CREDIT & DEBIT CARD AUTOPAY Authorization Form V1.0 2018UstazFaizalAriffinOriginalPas encore d'évaluation
- m100 Stopswitch ManualDocument12 pagesm100 Stopswitch ManualPatrick TiongsonPas encore d'évaluation
- Chapter 3 Views in ASP - NET CoreDocument23 pagesChapter 3 Views in ASP - NET Coremohammadabusaleh628Pas encore d'évaluation
- Section E Self Assessment Checklist For Metal Control StandardsDocument2 pagesSection E Self Assessment Checklist For Metal Control StandardsMohammed Ishak100% (1)
- Soft ListDocument21 pagesSoft Listgicox89Pas encore d'évaluation
- Royal Harare Golf Club: An Oasis of Excellence in The Midst of Political and Economic DevastationDocument24 pagesRoyal Harare Golf Club: An Oasis of Excellence in The Midst of Political and Economic DevastationCompleatGolferPas encore d'évaluation
- Comparison Between India and ChinaDocument92 pagesComparison Between India and Chinaapi-3710029100% (3)
- Introduction To TQMDocument24 pagesIntroduction To TQMSimantoPreeom100% (1)
- Face Detection PythonDocument5 pagesFace Detection PythonAADISH JAINPas encore d'évaluation
- Fmi-Hd BR PDFDocument16 pagesFmi-Hd BR PDFmin thantPas encore d'évaluation
- Flexi CE in RAS06-NokiaDocument39 pagesFlexi CE in RAS06-NokiaNikan AminiPas encore d'évaluation
- Nonlinear Optimization: Benny YakirDocument38 pagesNonlinear Optimization: Benny YakirMahfuzulhoq ChowdhuryPas encore d'évaluation
- History of Titan Watch IndustryDocument46 pagesHistory of Titan Watch IndustryWasim Khan25% (4)
- List of Yale University GraduatesDocument158 pagesList of Yale University GraduatesWilliam Litynski100% (1)
- The crucial step to a great careerDocument96 pagesThe crucial step to a great careerVinod ThukarulPas encore d'évaluation
- 8 - Vibration - F22-Vibration Isolation and AbsorptionDocument26 pages8 - Vibration - F22-Vibration Isolation and Absorptionالأردني JordanianPas encore d'évaluation
- Business Analysis-Xiaomi 30.8.15Document8 pagesBusiness Analysis-Xiaomi 30.8.15ocgPas encore d'évaluation
- Banking DictionaryDocument499 pagesBanking DictionaryVanessa Jenkins100% (4)
- Jaclyn Hanley ResumeDocument2 pagesJaclyn Hanley Resumeapi-267867788Pas encore d'évaluation
- Trial Balance Entries ListingDocument3 pagesTrial Balance Entries ListingIza ValdezPas encore d'évaluation
- Using the TreeView Control in Visual FoxProDocument5 pagesUsing the TreeView Control in Visual FoxProJulio RojasPas encore d'évaluation
- PT Jayatama 1Document4 pagesPT Jayatama 1afriza zuniaPas encore d'évaluation
- We BradDocument528 pagesWe BradBudi SutomoPas encore d'évaluation
- SG LO2 Apply Fertilizer (GoldTown)Document2 pagesSG LO2 Apply Fertilizer (GoldTown)Mayiendlesslove WhitePas encore d'évaluation
- Vda. de Consuegra v. Government Service Insurance System (1971)Document1 pageVda. de Consuegra v. Government Service Insurance System (1971)Andre Philippe RamosPas encore d'évaluation
- Delhi Metro Rail Corporation LTD Jr. Engineer Results PDFDocument3 pagesDelhi Metro Rail Corporation LTD Jr. Engineer Results PDFedujobnewsPas encore d'évaluation
- Ipocc User Interface enDocument364 pagesIpocc User Interface enMarthaGutnaraPas encore d'évaluation