Vous aimerez peut-être aussi
- Sistema de información para la operación remota de plantas de generación de energía hidroeléctricaD'EverandSistema de información para la operación remota de plantas de generación de energía hidroeléctricaPas encore d'évaluation
- Wuolah Free Practica 3Document9 pagesWuolah Free Practica 3M CastanPas encore d'évaluation
- Montaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109D'EverandMontaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109Pas encore d'évaluation
- Diseño e Implementación de Un Controlador Difuso Pd+i para El Control de Un Manipulador Robótico 4GDLDocument9 pagesDiseño e Implementación de Un Controlador Difuso Pd+i para El Control de Un Manipulador Robótico 4GDLceprelobix53Pas encore d'évaluation
- Parametros ServomotorDocument6 pagesParametros ServomotorJAVIER ALONSO MURILLO MURILLOPas encore d'évaluation
- 3141-Texto Del Artículo-2435-1-10-20120314Document5 pages3141-Texto Del Artículo-2435-1-10-20120314robinsonramoniPas encore d'évaluation
- Dialnet EstimacionDeParametrosDelMotorDeInduccionAPartirDe 4742467Document5 pagesDialnet EstimacionDeParametrosDelMotorDeInduccionAPartirDe 4742467Ivan Contrreras QuispePas encore d'évaluation
- Proyecto Sistemas Control de Vuelo T8Document30 pagesProyecto Sistemas Control de Vuelo T8Pere DasíPas encore d'évaluation
- Modelo Matematico de Motro DCDocument16 pagesModelo Matematico de Motro DCGómez AndrésPas encore d'évaluation
- Cinemática Directa Del Robot SMARTMAN EDDocument4 pagesCinemática Directa Del Robot SMARTMAN EDMizael MerinoPas encore d'évaluation
- PrimerDocument5 pagesPrimerOctavio Quispe Yucra100% (1)
- Informe VE FinalDocument6 pagesInforme VE FinalAshley AgudeloPas encore d'évaluation
- Avance ProyectoRoboticaDocument11 pagesAvance ProyectoRoboticaEduardo Antonio Guzmán OrtizPas encore d'évaluation
- Tarea4etodologías de Diseño Según Basadas en El Espacio de Estados.-Luis Andres Ramos - Grupo18 PistoDocument8 pagesTarea4etodologías de Diseño Según Basadas en El Espacio de Estados.-Luis Andres Ramos - Grupo18 Pistoluis andres ramosPas encore d'évaluation
- ControladoresDocument25 pagesControladoresutghstghsPas encore d'évaluation
- AvanceeeeDocument12 pagesAvanceeeeGómez Andrés100% (1)
- LabControl 3Document3 pagesLabControl 3Juan S ParraPas encore d'évaluation
- Lab Nº4 - Control de Trayectorias - v1-2012-IIDocument6 pagesLab Nº4 - Control de Trayectorias - v1-2012-IIDarkitmetal ValoPas encore d'évaluation
- Herramienta Matlab Robot ManipuladorDocument6 pagesHerramienta Matlab Robot ManipuladorLuis PinajotaPas encore d'évaluation
- Manipulador Robotico de 3 Grados de LibertadDocument6 pagesManipulador Robotico de 3 Grados de LibertadRICHAR1051100% (4)
- 3141 2435 1 PBDocument5 pages3141 2435 1 PBbryan eduardo villegas carrascoPas encore d'évaluation
- Parametro de Un Motor de CDDocument7 pagesParametro de Un Motor de CDCarlos Isaac Ramirez VelazquezPas encore d'évaluation
- Proyecto Motor DCDocument5 pagesProyecto Motor DCMarlon BoknegraPas encore d'évaluation
- Asignacion 1Document14 pagesAsignacion 1Jadith Vargas OchoaPas encore d'évaluation
- Informe No 1 ControlDocument7 pagesInforme No 1 ControlJuly Gisell Gomez FajardoPas encore d'évaluation
- Lab 2 Sistemas Control IIDocument3 pagesLab 2 Sistemas Control IIAlexander Quiroz CáceresPas encore d'évaluation
- Control Deslizante MRTM 2DOFDocument8 pagesControl Deslizante MRTM 2DOFRicardo Rodriguez BustinzaPas encore d'évaluation
- Primer Informe MT517 19 2Document17 pagesPrimer Informe MT517 19 2André RoblesPas encore d'évaluation
- Practica No 3 Etn807Document5 pagesPractica No 3 Etn807Armandinho Colque VargasPas encore d'évaluation
- ENSAYO - Brazo RoboticoDocument4 pagesENSAYO - Brazo RoboticoHernan SAPas encore d'évaluation
- Sistema de Control Haptico Con Retroalimentacion de FuerzaDocument11 pagesSistema de Control Haptico Con Retroalimentacion de FuerzaCHRISTIAN MENDOZAPas encore d'évaluation
- Simulación y Análisis de Circuitos Con Motores en Simulink.Document3 pagesSimulación y Análisis de Circuitos Con Motores en Simulink.Hugo RuizPas encore d'évaluation
- C098SE Lego ServomotorDocument6 pagesC098SE Lego ServomotorPegasus1986Pas encore d'évaluation
- Plantilla Reporte Electricidad y Magnetismo Ind 2022Document5 pagesPlantilla Reporte Electricidad y Magnetismo Ind 2022Acosta Castillo Ximena AraceliPas encore d'évaluation
- Proyecto FinalDocument16 pagesProyecto FinalGómez AndrésPas encore d'évaluation
- GUIAn5nARRANCADORnDIRECTOnCOMUNICANTEn2Gn2503564nFS 766525965e240fbDocument17 pagesGUIAn5nARRANCADORnDIRECTOnCOMUNICANTEn2Gn2503564nFS 766525965e240fbjaroldmartinezmPas encore d'évaluation
- Implementación de Simulink en Un Robot Paralelo - RobóticaDocument26 pagesImplementación de Simulink en Un Robot Paralelo - RobóticaAdrian RicardezPas encore d'évaluation
- Analisis Cinemático y Dinámico de Un Robot Manipulador Ivan Calle JournalDocument13 pagesAnalisis Cinemático y Dinámico de Un Robot Manipulador Ivan Calle Journalel_mishaPas encore d'évaluation
- U2 Robotica PDFDocument20 pagesU2 Robotica PDFAlex BanalexPas encore d'évaluation
- Grupo Polo Sanchez Toledo UlloaDocument3 pagesGrupo Polo Sanchez Toledo Ulloaseebass srosrPas encore d'évaluation
- Diseño y Modelado de Un Accionamiento MecánicoDocument11 pagesDiseño y Modelado de Un Accionamiento MecánicoYves WRPas encore d'évaluation
- Pendulo InvertidoDocument12 pagesPendulo InvertidoJazahel EspinosaPas encore d'évaluation
- Modelamiento y Análisis Matemático de Prototipo de Grua Tipo PuenteDocument7 pagesModelamiento y Análisis Matemático de Prototipo de Grua Tipo PuenteMartinRodriguezPas encore d'évaluation
- Deber 3 - Cinemática de Robots IndustrialesDocument5 pagesDeber 3 - Cinemática de Robots IndustrialesCristian UrrestaPas encore d'évaluation
- Presentación de Proyecto Mate IIIDocument9 pagesPresentación de Proyecto Mate IIIshengclawPas encore d'évaluation
- Lab 2 - CONTROL DE VELOCIDAD DE UN MOTOR DCDocument17 pagesLab 2 - CONTROL DE VELOCIDAD DE UN MOTOR DCCAMILO ANDRÉS HERNÁNDEZ STERLINGPas encore d'évaluation
- Proyecto-Corto-Pamh ProyectoCorto I 2020 PAMHDocument5 pagesProyecto-Corto-Pamh ProyectoCorto I 2020 PAMHJorge Rodríguez EsquivelPas encore d'évaluation
- Modelacion Posicion Motor DCDocument4 pagesModelacion Posicion Motor DCAdarleen Arevalo VallePas encore d'évaluation
- Informe Robot BalancinDocument7 pagesInforme Robot BalancinDaniel Piña100% (2)
- Control de Posición de Un Motor DCDocument15 pagesControl de Posición de Un Motor DCCAMILO ANDRÉS HERNÁNDEZ STERLINGPas encore d'évaluation
- Etn 7022 ArticuloDocument12 pagesEtn 7022 ArticuloJhonatan GutierrezPas encore d'évaluation
- Analisis Dinamico de Un Robot Hexapodo e PDFDocument19 pagesAnalisis Dinamico de Un Robot Hexapodo e PDFwinder portilloPas encore d'évaluation
- Entrega Final ProyectoDocument5 pagesEntrega Final ProyectoKIi LeePas encore d'évaluation
- 26 Fase2 ConsolidadoDocument12 pages26 Fase2 ConsolidadoFabian Eduardo Baron MorenoPas encore d'évaluation
- Metodologia Tarea4 PDFDocument3 pagesMetodologia Tarea4 PDFhoolmanPas encore d'évaluation
- Aponte Resumen ConferenciaDocument16 pagesAponte Resumen ConferenciaJavier OrtizPas encore d'évaluation
- Practica2 Arte Cinematica InverasaDocument18 pagesPractica2 Arte Cinematica InverasaMarcelo Vasquez GarciaPas encore d'évaluation
- Proyecto Final Etapa 2Document5 pagesProyecto Final Etapa 2Fernan SalvadorPas encore d'évaluation
- Simulación de La Estrategia de Control para Un Robot Manipulador de 3GDLDocument7 pagesSimulación de La Estrategia de Control para Un Robot Manipulador de 3GDLdanielUNIPas encore d'évaluation
- Implementación de Un Robot Con Dos Grados de Libertad (Cinemática)Document9 pagesImplementación de Un Robot Con Dos Grados de Libertad (Cinemática)Israel Jacob Abarca MoralesPas encore d'évaluation
- Mesa GiratoriaDocument1 pageMesa GiratoriajhuamangPas encore d'évaluation
- Reselin Betun - Astech - 243Document1 pageReselin Betun - Astech - 243jhuamangPas encore d'évaluation
- Pistones Sachetera Liquidos Elo - 217 - 11Document1 pagePistones Sachetera Liquidos Elo - 217 - 11jhuamangPas encore d'évaluation
- PLANEAMIENTO B& H 2000Document8 pagesPLANEAMIENTO B& H 2000jhuamangPas encore d'évaluation
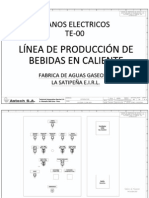
- Satipo FlomixDocument11 pagesSatipo FlomixjhuamangPas encore d'évaluation
- Transformador 380/220 VacDocument2 pagesTransformador 380/220 VacjhuamangPas encore d'évaluation
- Neuro Controlador Motor DCDocument10 pagesNeuro Controlador Motor DCjhuamang100% (2)
- Unidad Educativa Temporal CalumaDocument4 pagesUnidad Educativa Temporal CalumaAlan RecaldePas encore d'évaluation
- Ejemplos ConvecciónDocument16 pagesEjemplos ConvecciónminatominatoPas encore d'évaluation
- Formulario Fis 2 Segundo Parcial PDFDocument4 pagesFormulario Fis 2 Segundo Parcial PDFMisael OrellanoPas encore d'évaluation
- Excel de Laboratorio 7 de Física 2Document9 pagesExcel de Laboratorio 7 de Física 2Abad Estrada VargasPas encore d'évaluation
- Programa Física-IV UESDocument5 pagesPrograma Física-IV UESSergio AguilarPas encore d'évaluation
- Tema 54Document13 pagesTema 54a1_web2_01768100% (2)
- Introducción FisicaDocument16 pagesIntroducción FisicaAnita MejiaPas encore d'évaluation
- Ejer Posicion Desplazamiento 2013Document5 pagesEjer Posicion Desplazamiento 2013Cirilo Armando Solano PinedaPas encore d'évaluation
- Cerchas y BastidoresDocument30 pagesCerchas y Bastidoresjuan ceballosPas encore d'évaluation
- Fatiga de Los MaterialesDocument30 pagesFatiga de Los MaterialesCaruci Alfredo89% (9)
- 01 El Átomo y Su EstructuraDocument15 pages01 El Átomo y Su EstructuraJohn Alberto Vasquez HurtadoPas encore d'évaluation
- Disipadores Sismicos y Refuerzo - Estructural - v2017 PDFDocument120 pagesDisipadores Sismicos y Refuerzo - Estructural - v2017 PDFAnonymous kdD6j8DR4QPas encore d'évaluation
- Informe de Fisica, Segunda Ley de Newton.Document20 pagesInforme de Fisica, Segunda Ley de Newton.Alex J. GonzálezPas encore d'évaluation
- Sem3-Mecanica de FluidosDocument2 pagesSem3-Mecanica de FluidosVale MayorgaPas encore d'évaluation
- Impri MirDocument53 pagesImpri MirNatalia LorenzoPas encore d'évaluation
- Guia Didáctica de La Ley de FaradayDocument3 pagesGuia Didáctica de La Ley de FaradaySilvioChávezPas encore d'évaluation
- Hormigón Armado 1Document71 pagesHormigón Armado 1Luiggi Fernando Diaz AcostaPas encore d'évaluation
- Fuerzas Internas en VigasDocument16 pagesFuerzas Internas en Vigasالكسندر جاروPas encore d'évaluation
- Creacion de Espectro de Respuesta Elastico e Inelastico Segun NEC-DS 2015Document36 pagesCreacion de Espectro de Respuesta Elastico e Inelastico Segun NEC-DS 2015GabrielPantojaPas encore d'évaluation
- Proceso de Laminacion - FinalDocument69 pagesProceso de Laminacion - FinalRoberto Molina RoldánPas encore d'évaluation
- CV - Movimientos CircularesDocument18 pagesCV - Movimientos CircularesjnzhrjPas encore d'évaluation
- Guía de Práctica Semana 10Document4 pagesGuía de Práctica Semana 10Angel Paul LaraPas encore d'évaluation
- Informe Perdida de CargaDocument22 pagesInforme Perdida de Cargaalejj19Pas encore d'évaluation
- Memoria de CálculoDocument159 pagesMemoria de CálculoWilmer J. Carhuas LoyolaPas encore d'évaluation
- Mru - Mruv LlapanaticDocument5 pagesMru - Mruv LlapanaticANGEL FRANCISCO YANAC ROQUEPas encore d'évaluation
- 2017-06-Coi-Madrid-Fisica-Soluc (1) AsccsasaDocument7 pages2017-06-Coi-Madrid-Fisica-Soluc (1) Asccsasaoms 250605Pas encore d'évaluation
- Informe de CalorimetriaDocument4 pagesInforme de Calorimetriajuan pabloPas encore d'évaluation
- Analisis Sismico DinamicoDocument8 pagesAnalisis Sismico DinamicoManuel Colmenares100% (1)
- Sebastian - Leon (Tarea6)Document5 pagesSebastian - Leon (Tarea6)Sebastian León BarrientosPas encore d'évaluation
- Manual Técnico PETROPLAST 2018Document74 pagesManual Técnico PETROPLAST 2018Tomas HaasePas encore d'évaluation
- Psicología oscura: Una guía esencial de persuasión, manipulación, engaño, control mental, negociación, conducta humana, PNL y guerra psicológicaD'EverandPsicología oscura: Una guía esencial de persuasión, manipulación, engaño, control mental, negociación, conducta humana, PNL y guerra psicológicaÉvaluation : 4.5 sur 5 étoiles4.5/5 (766)
- Resetea tu mente. Descubre de lo que eres capazD'EverandResetea tu mente. Descubre de lo que eres capazÉvaluation : 5 sur 5 étoiles5/5 (196)
- Recupera tu mente, reconquista tu vidaD'EverandRecupera tu mente, reconquista tu vidaÉvaluation : 5 sur 5 étoiles5/5 (8)
- Resumen de Pensar rápido pensar despacio de Daniel KahnemanD'EverandResumen de Pensar rápido pensar despacio de Daniel KahnemanÉvaluation : 4.5 sur 5 étoiles4.5/5 (64)
- Contra la ansiedad: Una guía completa para manejar emociones difícilesD'EverandContra la ansiedad: Una guía completa para manejar emociones difícilesÉvaluation : 5 sur 5 étoiles5/5 (58)
- Influencia. La psicología de la persuasiónD'EverandInfluencia. La psicología de la persuasiónÉvaluation : 4.5 sur 5 étoiles4.5/5 (14)
- Yo Pude, ¡Tú Puedes!: Cómo tomar el control de tu bienestar emocional y convertirte en una persona imparable (edición revisada y expandida)D'EverandYo Pude, ¡Tú Puedes!: Cómo tomar el control de tu bienestar emocional y convertirte en una persona imparable (edición revisada y expandida)Évaluation : 5 sur 5 étoiles5/5 (8)
- La violencia invisible: Identificar, entender y superar la violencia psicológica que sufrimos (y ejercemos) en nuestra vida cotidianaD'EverandLa violencia invisible: Identificar, entender y superar la violencia psicológica que sufrimos (y ejercemos) en nuestra vida cotidianaÉvaluation : 4 sur 5 étoiles4/5 (2)
- El poder del optimismo: Herramientas para vivir de forma más positivaD'EverandEl poder del optimismo: Herramientas para vivir de forma más positivaÉvaluation : 5 sur 5 étoiles5/5 (16)
- Escritura terapéutica. El poder curativo de la expresión escritaD'EverandEscritura terapéutica. El poder curativo de la expresión escritaÉvaluation : 5 sur 5 étoiles5/5 (2)
- Terapia cognitivo-conductual (TCC) y terapia dialéctico-conductual (TDC): Cómo la TCC, la TDC y la ACT pueden ayudarle a superar la ansiedad, la depresión, y los TOCSD'EverandTerapia cognitivo-conductual (TCC) y terapia dialéctico-conductual (TDC): Cómo la TCC, la TDC y la ACT pueden ayudarle a superar la ansiedad, la depresión, y los TOCSÉvaluation : 5 sur 5 étoiles5/5 (1)
- 7 tendencias digitales que cambiarán el mundoD'Everand7 tendencias digitales que cambiarán el mundoÉvaluation : 4.5 sur 5 étoiles4.5/5 (87)
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroD'EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroÉvaluation : 4 sur 5 étoiles4/5 (1)
- Una mente en calma: Técnicas para manejar los pensamientos intrusivosD'EverandUna mente en calma: Técnicas para manejar los pensamientos intrusivosÉvaluation : 4.5 sur 5 étoiles4.5/5 (142)
- No desperdicies tus emociones: Cómo lo que sientes te acerca a Dios y le da gloriaD'EverandNo desperdicies tus emociones: Cómo lo que sientes te acerca a Dios y le da gloriaÉvaluation : 5 sur 5 étoiles5/5 (13)
- Cómo romper el ciclo de pensamientos negativosD'EverandCómo romper el ciclo de pensamientos negativosÉvaluation : 4.5 sur 5 étoiles4.5/5 (274)
- Tu cerebro emocional: Saca partido de lo que sientes y transforma tu vidaD'EverandTu cerebro emocional: Saca partido de lo que sientes y transforma tu vidaÉvaluation : 5 sur 5 étoiles5/5 (2)
- El Tesoro Escondido (Hidden Treasure): La vida interior de niños y adolescentes. Terapia infanto-juvenilD'EverandEl Tesoro Escondido (Hidden Treasure): La vida interior de niños y adolescentes. Terapia infanto-juvenilÉvaluation : 5 sur 5 étoiles5/5 (4)
- The Coaching Habit: Las 7 preguntas clave para liderar equipos y organizaciones del siglo XXID'EverandThe Coaching Habit: Las 7 preguntas clave para liderar equipos y organizaciones del siglo XXIÉvaluation : 4.5 sur 5 étoiles4.5/5 (166)
- La soledad: Comprenderla y gestionarla para no sentirse soloD'EverandLa soledad: Comprenderla y gestionarla para no sentirse soloÉvaluation : 4.5 sur 5 étoiles4.5/5 (10)
- Yo, ego. Una guía para dejar de sufrir, conectar contigo mismo y alcanzar la paz mentalD'EverandYo, ego. Una guía para dejar de sufrir, conectar contigo mismo y alcanzar la paz mentalÉvaluation : 4.5 sur 5 étoiles4.5/5 (7)
- Cómo terminar lo que empiezas: El arte de perseverar, pasar a la acción, ejecutar los planes y tener disciplinaD'EverandCómo terminar lo que empiezas: El arte de perseverar, pasar a la acción, ejecutar los planes y tener disciplinaÉvaluation : 4.5 sur 5 étoiles4.5/5 (6)
- Maneja tus emociones: Curso intensivo de mindfulness y regulación emocionalD'EverandManeja tus emociones: Curso intensivo de mindfulness y regulación emocionalÉvaluation : 4.5 sur 5 étoiles4.5/5 (140)