Vous aimerez peut-être aussi
- Automotive Electronic Diagnostics (Course 2)D'EverandAutomotive Electronic Diagnostics (Course 2)Évaluation : 4 sur 5 étoiles4/5 (2)
- Speed Pid AlgDocument1 pageSpeed Pid AlgKicus InamrupPas encore d'évaluation
- Automation of Rotogravure Printing MachineDocument12 pagesAutomation of Rotogravure Printing MachineshraddhaPas encore d'évaluation
- BLDC Sinusoidal ControlDocument6 pagesBLDC Sinusoidal ControlOctavian MîrţiPas encore d'évaluation
- PID Speed Control of DC Motor Using MicrocontrollerDocument7 pagesPID Speed Control of DC Motor Using MicrocontrollerGias NawariPas encore d'évaluation
- PID AlgDocument2 pagesPID AlgAheesha J VadaviPas encore d'évaluation
- Digital TachometerDocument12 pagesDigital TachometerHariniPas encore d'évaluation
- Ijarcce 15Document4 pagesIjarcce 15toninolePas encore d'évaluation
- Microcontroller Based Digital Trigger Circuit For ConverterDocument7 pagesMicrocontroller Based Digital Trigger Circuit For ConverteridescitationPas encore d'évaluation
- RPM IndicatorDocument39 pagesRPM IndicatorAnkur PatelPas encore d'évaluation
- Single Phase Ac DriveDocument4 pagesSingle Phase Ac DriveersathisPas encore d'évaluation
- Design and Implementation of A Digital TachometerDocument3 pagesDesign and Implementation of A Digital TachometerInnovative Research Publications0% (1)
- Microprocessor Based Digital PID Controller For Speed Control of D.C. MotorDocument6 pagesMicroprocessor Based Digital PID Controller For Speed Control of D.C. MotorSwapnica GarrePas encore d'évaluation
- Design and Implementation of Digital Trigger Circuit For ConverterDocument6 pagesDesign and Implementation of Digital Trigger Circuit For ConverterBilal Ali AhmadPas encore d'évaluation
- Mini Report Final1Document33 pagesMini Report Final1kanjisarathPas encore d'évaluation
- 04 SpeedControlDocument5 pages04 SpeedControlAngel ChicchonPas encore d'évaluation
- Design and Implementation of PID Controller For Motor Position ControlDocument5 pagesDesign and Implementation of PID Controller For Motor Position ControlOwais Ahmad KhanPas encore d'évaluation
- Monitoring and Control of Single Phase Induction Motor: Power SupplyDocument16 pagesMonitoring and Control of Single Phase Induction Motor: Power SupplydineshkumarPas encore d'évaluation
- Report Car Parking SystemDocument64 pagesReport Car Parking SystemSebastin AshokPas encore d'évaluation
- Working Principle: 1) System CheckDocument8 pagesWorking Principle: 1) System CheckHans IngolePas encore d'évaluation
- AEM4Document7 pagesAEM4dhaval2430Pas encore d'évaluation
- Electronica - Servo Control of A Dc-Brush Motor An532Document89 pagesElectronica - Servo Control of A Dc-Brush Motor An532Ismael 8877Pas encore d'évaluation
- AN532 - Servo Control of A DC Brush Motor PDFDocument141 pagesAN532 - Servo Control of A DC Brush Motor PDFpierdonnePas encore d'évaluation
- Management-Design and Implementation of Fuel Flow-SharanabasappaDocument8 pagesManagement-Design and Implementation of Fuel Flow-SharanabasappaBESTJournalsPas encore d'évaluation
- Designs of Input and Output Driver Circuits For 16-Bit Electronic Control Unit (Ecu) and Development of Control Strategy For Ecu Using These Io Driver CircuitsDocument5 pagesDesigns of Input and Output Driver Circuits For 16-Bit Electronic Control Unit (Ecu) and Development of Control Strategy For Ecu Using These Io Driver CircuitsInternational Journal of Research in Engineering and TechnologyPas encore d'évaluation
- Speed Control of DC Motor Using Pid Controller BasedDocument16 pagesSpeed Control of DC Motor Using Pid Controller Basedayesha amjadPas encore d'évaluation
- BLDC Motor Speed Control With RPM DisplayDocument19 pagesBLDC Motor Speed Control With RPM Displays.b.v.seshagiri1407Pas encore d'évaluation
- Digital Tachometer Using Arduino Plus Speed Control.: RPM SensorDocument3 pagesDigital Tachometer Using Arduino Plus Speed Control.: RPM SensorJeyadheepan KaPas encore d'évaluation
- DC Motor PI ControllerDocument6 pagesDC Motor PI ControllerPooja MaathPas encore d'évaluation
- Speed Control of DC Motor Using Pid ControllerDocument20 pagesSpeed Control of DC Motor Using Pid ControllerBUBUNPas encore d'évaluation
- Closed Loop DC Motor Speed ControlDocument3 pagesClosed Loop DC Motor Speed ControlKhayaz KunhabduPas encore d'évaluation
- Designs of Input and Output Driver Circuits For 16-Bit Electronic Control Unit (Ecu) and Development of Control Strategy For Ecu Using These I o Driver CircuitsDocument5 pagesDesigns of Input and Output Driver Circuits For 16-Bit Electronic Control Unit (Ecu) and Development of Control Strategy For Ecu Using These I o Driver CircuitsesatjournalsPas encore d'évaluation
- Speed and Control of DC Motors PDF BookDocument12 pagesSpeed and Control of DC Motors PDF BookakylpuMEPas encore d'évaluation
- CECS 347 Spring 2019 Final Project Robot Car With Distance Sensors and LCD DisplayDocument11 pagesCECS 347 Spring 2019 Final Project Robot Car With Distance Sensors and LCD Displayhoussemeddin loudhabachiPas encore d'évaluation
- 1.1 Objective:: MBICTDocument47 pages1.1 Objective:: MBICTsagarparikh31yahoo_cPas encore d'évaluation
- Digital Tachometer Using Arduino Plus Speed ControlDocument3 pagesDigital Tachometer Using Arduino Plus Speed ControlCarioquenhoPas encore d'évaluation
- 00718a - Brush-DC Servomotor Implementation Using PIC17C756ADocument33 pages00718a - Brush-DC Servomotor Implementation Using PIC17C756AadisaksPas encore d'évaluation
- Tachometer Using ArduinoDocument4 pagesTachometer Using ArduinoJamMnx_Pas encore d'évaluation
- AutoSim Manual ENGDocument18 pagesAutoSim Manual ENGLee Tai PoPas encore d'évaluation
- Design and Implementation of Digital Trigger Circuit For Converter IJERTV1IS3229 PDFDocument6 pagesDesign and Implementation of Digital Trigger Circuit For Converter IJERTV1IS3229 PDFShakir HussainPas encore d'évaluation
- Ijsrp p8321Document7 pagesIjsrp p8321Vipul SharmaPas encore d'évaluation
- PSDLDocument22 pagesPSDLHarshal PatilPas encore d'évaluation
- Induction Motor Speed & Direction ControllerDocument3 pagesInduction Motor Speed & Direction ControllerRavikumar PrajapatiPas encore d'évaluation
- Microprocessor Based DC Motor Speed Control SystemDocument12 pagesMicroprocessor Based DC Motor Speed Control SystemDaksh ShahPas encore d'évaluation
- Hybrid Electric VehicleDocument11 pagesHybrid Electric VehicleOnur ATASEVENPas encore d'évaluation
- 02 PIDcontroller PDFDocument5 pages02 PIDcontroller PDFZugravu AndreiPas encore d'évaluation
- PID Wall FollowerDocument12 pagesPID Wall FollowerNilanjana BhattacharyaPas encore d'évaluation
- User Guide 08092: IRMCS3043 System Overview/GuideDocument14 pagesUser Guide 08092: IRMCS3043 System Overview/GuidePedro Leandro SilvaPas encore d'évaluation
- User Guide 08092: IRMCS3043 System Overview/GuideDocument14 pagesUser Guide 08092: IRMCS3043 System Overview/GuidePedro Leandro SilvaPas encore d'évaluation
- An Overview of PLC Based Control Panel System For External Plunge Grinding Machine and CNC MachineDocument3 pagesAn Overview of PLC Based Control Panel System For External Plunge Grinding Machine and CNC MachineIJMERPas encore d'évaluation
- Bimbingan LC Nathanael Ryan C 1614003Document10 pagesBimbingan LC Nathanael Ryan C 1614003Nat_ael11Pas encore d'évaluation
- Novel Method PMDC Motor Speed ControlDocument15 pagesNovel Method PMDC Motor Speed ControlTravis WoodPas encore d'évaluation
- Hand Gesture Control Robot PDFDocument3 pagesHand Gesture Control Robot PDFMd IrfanPas encore d'évaluation
- Speed Control of A DC Motor Using Hand GestureDocument4 pagesSpeed Control of A DC Motor Using Hand GestureArka Prava LahiriPas encore d'évaluation
- Design and Simulation of Microcontroller Based Governor Controlled IC EngineDocument1 pageDesign and Simulation of Microcontroller Based Governor Controlled IC EngineBijil BajiPas encore d'évaluation
- DC Servo Motor ControlDocument14 pagesDC Servo Motor ControlKundan NamadePas encore d'évaluation
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1D'EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Évaluation : 2.5 sur 5 étoiles2.5/5 (3)
- Appendix A - Unit Test - 1 Sample PaperDocument13 pagesAppendix A - Unit Test - 1 Sample PaperManoj KavediaPas encore d'évaluation
- Arduino Board SensorsDocument3 pagesArduino Board SensorsManoj KavediaPas encore d'évaluation
- Establishing JDBC Connection in JavaDocument39 pagesEstablishing JDBC Connection in JavaManoj KavediaPas encore d'évaluation
- Arduino - Basic ProgrammingDocument47 pagesArduino - Basic ProgrammingManoj KavediaPas encore d'évaluation
- 08 - Chapter 2Document107 pages08 - Chapter 2Priya PandeyPas encore d'évaluation
- Experiment No 9 Calculations On Memory LocationsDocument2 pagesExperiment No 9 Calculations On Memory LocationsManoj KavediaPas encore d'évaluation
- BLUETOOTH ArchitectureDocument38 pagesBLUETOOTH ArchitecturenaushadvickyPas encore d'évaluation
- ExpNo 3Document1 pageExpNo 3Manoj KavediaPas encore d'évaluation
- Chapter Wise Question BankDocument15 pagesChapter Wise Question BankManoj KavediaPas encore d'évaluation
- Question Bank - Unit Test-1Document2 pagesQuestion Bank - Unit Test-1Manoj KavediaPas encore d'évaluation
- 22-03-2017 Ste PSTDocument5 pages22-03-2017 Ste PSTManoj KavediaPas encore d'évaluation
- Collections in JavaDocument64 pagesCollections in JavaManoj KavediaPas encore d'évaluation
- Analysis and Prediction of Natural Disaster Ieee PAPERDocument1 pageAnalysis and Prediction of Natural Disaster Ieee PAPERManoj KavediaPas encore d'évaluation
- String InstructionsDocument7 pagesString InstructionsManoj Kavedia100% (1)
- List of Laboratory ExperimentsDocument1 pageList of Laboratory ExperimentsManoj KavediaPas encore d'évaluation
- Chapter 2Document1 pageChapter 2Manoj KavediaPas encore d'évaluation
- UrlDocument1 pageUrlManoj KavediaPas encore d'évaluation
- Se-Comps Sem3 Eccf Dec15Document2 pagesSe-Comps Sem3 Eccf Dec15Manoj KavediaPas encore d'évaluation
- Unit 1Document2 pagesUnit 1Manoj KavediaPas encore d'évaluation
- The 8051 Microcontrollers: Microcontrollers and Embedded Processors, Overview of 8051Document1 pageThe 8051 Microcontrollers: Microcontrollers and Embedded Processors, Overview of 8051Manoj KavediaPas encore d'évaluation
- EC 351 AC-good Practicals PDFDocument46 pagesEC 351 AC-good Practicals PDFManoj KavediaPas encore d'évaluation
- Double-Sideband Suppressed Carrier Modulation (DSB-SC) : T A T A T M T C T SDocument28 pagesDouble-Sideband Suppressed Carrier Modulation (DSB-SC) : T A T A T M T C T SManoj KavediaPas encore d'évaluation
- Simple Calculator Using AppletDocument6 pagesSimple Calculator Using AppletManoj Kavedia50% (2)
- Machine, Domain Specific - Automotive. Peripherals, Memory - RAM, ROM, Types of RAM and ROM, Memory Testing, CRC, Flash MemoryDocument2 pagesMachine, Domain Specific - Automotive. Peripherals, Memory - RAM, ROM, Types of RAM and ROM, Memory Testing, CRC, Flash MemoryManoj KavediaPas encore d'évaluation
- Electronic CircuitsDocument3 pagesElectronic CircuitsManoj KavediaPas encore d'évaluation
- Exception HandlingDocument6 pagesException HandlingManoj KavediaPas encore d'évaluation
- Applet ExamplesDocument34 pagesApplet ExamplesManoj KavediaPas encore d'évaluation
- Integrator and DifferentiatorDocument7 pagesIntegrator and DifferentiatorManoj KavediaPas encore d'évaluation
- Street Lighting Technology ComparisonDocument7 pagesStreet Lighting Technology ComparisonManoj KavediaPas encore d'évaluation
- Peltier Effect Based Solar Powered Air Conditioning SystemDocument6 pagesPeltier Effect Based Solar Powered Air Conditioning SystemManoj Kavedia100% (1)
- Circuito Integrado TA8207KDocument11 pagesCircuito Integrado TA8207KIberê CamposPas encore d'évaluation
- Can CrusherDocument81 pagesCan CrusherJhon Don100% (1)
- Abb Pricelist 2016 16.03.2016 PDFDocument216 pagesAbb Pricelist 2016 16.03.2016 PDFhiralalnhpcPas encore d'évaluation
- Raport: Lucrare de Laborator 4Document7 pagesRaport: Lucrare de Laborator 4Mr.SDPas encore d'évaluation
- Overlapping Contact 800t Td006 en PDocument8 pagesOverlapping Contact 800t Td006 en PDony SaputraPas encore d'évaluation
- HPV 02 VariablePump enDocument36 pagesHPV 02 VariablePump enSorinPas encore d'évaluation
- How To Call - and Answer - A CQDocument22 pagesHow To Call - and Answer - A CQMike HammondsPas encore d'évaluation
- Non-Contact Infrared Thermometers Operating Manual: Downloaded From Manuals Search EngineDocument16 pagesNon-Contact Infrared Thermometers Operating Manual: Downloaded From Manuals Search EngineOmar RodriguezPas encore d'évaluation
- Interfacing 8251 With 8086 PDFDocument10 pagesInterfacing 8251 With 8086 PDFMurthyPas encore d'évaluation
- Areas of Specialisation in GENCO and DISCO - PPDocument33 pagesAreas of Specialisation in GENCO and DISCO - PPchdiPas encore d'évaluation
- Innovative LED Streetlight Replacement PDFDocument50 pagesInnovative LED Streetlight Replacement PDFLiu KennyPas encore d'évaluation
- Xcortech XT301 Compact Airsoft Tracer Unit Manual: Setup ProcessDocument3 pagesXcortech XT301 Compact Airsoft Tracer Unit Manual: Setup ProcessrobertoPas encore d'évaluation
- Image Contrast Enhancement Using Combination of DWT & SWT With CLAHEDocument4 pagesImage Contrast Enhancement Using Combination of DWT & SWT With CLAHEIJRASETPublicationsPas encore d'évaluation
- M100700D - MME For Fanuc 6 - 11 - 12 ManualDocument38 pagesM100700D - MME For Fanuc 6 - 11 - 12 ManualTony AntonyPas encore d'évaluation
- M.tech Advanced Digital Signal ProcessingDocument1 pageM.tech Advanced Digital Signal ProcessingsrinivasPas encore d'évaluation
- Pierlite Led PanelsDocument4 pagesPierlite Led PanelsAzeemPas encore d'évaluation
- ELT 1000 Manual Y1-03-0259AADocument65 pagesELT 1000 Manual Y1-03-0259AARay Adrian CalinawanPas encore d'évaluation
- MATLAB and Simulink Modelling of A Full State Observer Controller of Armature Controlled and Field Controlled DC Motor Using State Space ApproachDocument8 pagesMATLAB and Simulink Modelling of A Full State Observer Controller of Armature Controlled and Field Controlled DC Motor Using State Space ApproachNitsuga PomeloréPas encore d'évaluation
- All About OFDMDocument7 pagesAll About OFDMDheyauldeen NajimPas encore d'évaluation
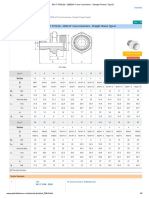
- GB - T 3733 (B) - 200824° Cone Connectors - Straight Thread, Type BDocument3 pagesGB - T 3733 (B) - 200824° Cone Connectors - Straight Thread, Type BEr.Amritpal SinghPas encore d'évaluation
- Assembly-Level Service Guide Counter 53132ADocument252 pagesAssembly-Level Service Guide Counter 53132AJhonSebastianGarcia100% (1)
- ECE 421 Lab4Document39 pagesECE 421 Lab4LuelsonCordovaDeclaradorPas encore d'évaluation
- GSM Based Car Security System: Sandeep Goyal Suhail Mehta Shwetank Panwar SonuDocument19 pagesGSM Based Car Security System: Sandeep Goyal Suhail Mehta Shwetank Panwar SonuSuhail MehtaPas encore d'évaluation
- Testing The PIC Microcontroller 16F84ADocument4 pagesTesting The PIC Microcontroller 16F84AMatt Imri100% (2)
- Mod. SSP-1/EV: Programmable Systems SimulatorDocument2 pagesMod. SSP-1/EV: Programmable Systems Simulatorlusoegyi 1919Pas encore d'évaluation
- Opera:ng Systems: Dr. P. Sateesh KumarDocument26 pagesOpera:ng Systems: Dr. P. Sateesh KumarSurendra ParlaPas encore d'évaluation
- Business PlanDocument25 pagesBusiness PlanMahesan SinthujanPas encore d'évaluation
- List Android New Application and Tools 2012Document58 pagesList Android New Application and Tools 2012Muhammad RizwanPas encore d'évaluation
- Bangaon Division ConsumptionDocument2 pagesBangaon Division ConsumptionJuBeePas encore d'évaluation