Vous aimerez peut-être aussi
- HRTEMDocument5 pagesHRTEMRajathi YadavPas encore d'évaluation
- Experiment 1Document9 pagesExperiment 1Shaun Loo50% (2)
- Line Following RobotDocument54 pagesLine Following RobotGautam RaaviPas encore d'évaluation
- Line Following Robot With Color Detection PDFDocument10 pagesLine Following Robot With Color Detection PDFpaishkepeng100% (1)
- Line Follower RobotDocument29 pagesLine Follower RobotSebastin AshokPas encore d'évaluation
- A Line Follower Robot-ICCAE 2010Document6 pagesA Line Follower Robot-ICCAE 2010Ioan DorofteiPas encore d'évaluation
- Line Follower Robot. 03docDocument30 pagesLine Follower Robot. 03docBilal Ali Ahmad0% (1)
- Line Follower Robot Using ArduinoDocument13 pagesLine Follower Robot Using Arduinolizhi2012Pas encore d'évaluation
- Line Follower RobotDocument4 pagesLine Follower Robotmari_euPas encore d'évaluation
- Line FollowerDocument37 pagesLine FollowerZara SaeedPas encore d'évaluation
- Building A Line Following RobotDocument31 pagesBuilding A Line Following RobotRohit WadhwaniPas encore d'évaluation
- Final Copy of Line Follower RobotDocument9 pagesFinal Copy of Line Follower RobotAhuja ShivamPas encore d'évaluation
- Human Following Robot-2 PDFDocument7 pagesHuman Following Robot-2 PDFSUDEEPTA CHANDRA PAULPas encore d'évaluation
- IoT Based Car Parking SystemDocument3 pagesIoT Based Car Parking SystemInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- Line Following Robot Final Year ProjectsDocument37 pagesLine Following Robot Final Year ProjectsOmer Jamal Abdalgbar100% (1)
- PROJECT Report of 3legged RobotDocument13 pagesPROJECT Report of 3legged RobotPrajwal YadavPas encore d'évaluation
- Line Follower Atmega16 Vienna UniversityDocument30 pagesLine Follower Atmega16 Vienna UniversityBuihung HungPas encore d'évaluation
- Chapter 11 Robotics in Manufacturing Processes p182-197Document21 pagesChapter 11 Robotics in Manufacturing Processes p182-197api-152132438Pas encore d'évaluation
- Wireless Robot and Robotic Arm Control With Accelerometer Sensor ProjectDocument51 pagesWireless Robot and Robotic Arm Control With Accelerometer Sensor ProjectAmandeep Singh KheraPas encore d'évaluation
- Line Following Robot ResearchDocument4 pagesLine Following Robot ResearchtherealslimPas encore d'évaluation
- 21.line Following RobotDocument78 pages21.line Following RobotsathishPas encore d'évaluation
- Microcontroller Based Rail Tracking and Accident Avoidance SystemDocument3 pagesMicrocontroller Based Rail Tracking and Accident Avoidance SystemMamatha MarriPas encore d'évaluation
- Microcontroller Based Robotic ArmDocument5 pagesMicrocontroller Based Robotic Armনূর হোসেন সৌরভ0% (1)
- PC Controlled Wireless Multipurpose Robot For Surveillance SystemDocument41 pagesPC Controlled Wireless Multipurpose Robot For Surveillance SystemFiroz Ahmed KhanPas encore d'évaluation
- Gesture Controlled RobotDocument36 pagesGesture Controlled RobotTeena Sharma44% (9)
- Industrial Disaster ManagementDocument68 pagesIndustrial Disaster ManagementMaheshchandra Yadav100% (1)
- Line Follower RobotDocument16 pagesLine Follower RobotSebastian NistoricăPas encore d'évaluation
- Line Follower Robot ArduinoDocument5 pagesLine Follower Robot ArduinoMikoko YanosudaPas encore d'évaluation
- Line Following RobotDocument18 pagesLine Following RobotKamran FaisalPas encore d'évaluation
- Line Follower RobotDocument16 pagesLine Follower RobotVenkat Munnangi100% (1)
- Application of RFID Technology and The Maximum Spanning Tree Algorithum For Solving Vehicle Emission in Cities On IOTDocument71 pagesApplication of RFID Technology and The Maximum Spanning Tree Algorithum For Solving Vehicle Emission in Cities On IOTsrivalli pPas encore d'évaluation
- A Robotic Automatic Assembly System Based On VisioDocument19 pagesA Robotic Automatic Assembly System Based On VisioXavier Eduardo100% (1)
- Line Follower RobotDocument16 pagesLine Follower RobotRohit sharmaPas encore d'évaluation
- Industrial Robotics: History and Definition Classification of Robot Robot Anatomy and Robot Motion Work VolumeDocument73 pagesIndustrial Robotics: History and Definition Classification of Robot Robot Anatomy and Robot Motion Work VolumeSiddharth Gupta0% (1)
- LFR ReportDocument9 pagesLFR ReportBilal ShafiPas encore d'évaluation
- Line Follower RobotDocument5 pagesLine Follower Robotsud93100% (2)
- How Driverless Cars Will WorkDocument14 pagesHow Driverless Cars Will WorkKshitij Sharma0% (1)
- On Minor ProjectDocument21 pagesOn Minor ProjectMANISHA S67% (3)
- Line Tracking RobotDocument45 pagesLine Tracking Robotminaadly100% (1)
- Mini Project SrihariDocument14 pagesMini Project SrihariAshik GRPas encore d'évaluation
- Line Follower Robot Using ArduinoDocument5 pagesLine Follower Robot Using ArduinoJesus Eduardo Campos ArcosPas encore d'évaluation
- Project Report On Obstacle Avoiding RobotDocument8 pagesProject Report On Obstacle Avoiding RobotAmit Chakraborty50% (12)
- Project Report II - ModifiedDocument33 pagesProject Report II - ModifiedRupam MedhiPas encore d'évaluation
- Line FollowerDocument47 pagesLine Followeryogi6804Pas encore d'évaluation
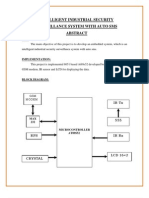
- Intelligent Industrial Security Surveillance System With Auto SmsDocument3 pagesIntelligent Industrial Security Surveillance System With Auto SmsMamatha MarriPas encore d'évaluation
- Dr. Ambedkar Institute of Technology: Under The Guidance ofDocument6 pagesDr. Ambedkar Institute of Technology: Under The Guidance ofSushanth KenguntePas encore d'évaluation
- Hand Gesture Control Robot PDFDocument3 pagesHand Gesture Control Robot PDFMd IrfanPas encore d'évaluation
- 6servo Robot Arm EngDocument18 pages6servo Robot Arm EngĐỗ ThànhPas encore d'évaluation
- Unit - I Lecture Notes PDFDocument12 pagesUnit - I Lecture Notes PDFCody LeePas encore d'évaluation
- Proximity SensorDocument3 pagesProximity SensorAbhay SehgalPas encore d'évaluation
- Exp1 DC Motor Control With Computer Interfacing To MicrocontrollerDocument4 pagesExp1 DC Motor Control With Computer Interfacing To MicrocontrollerKyle Janssen VillanuevaPas encore d'évaluation
- FireDocument56 pagesFireBerihun EngdaPas encore d'évaluation
- Steering Mechanism of Autonomous VehicleDocument27 pagesSteering Mechanism of Autonomous VehicleChetan SwaroopPas encore d'évaluation
- Emedded Systems: Project Lab ReportDocument17 pagesEmedded Systems: Project Lab Reportdilawaiz sultanPas encore d'évaluation
- Face Detection and Recognition on Mobile DevicesD'EverandFace Detection and Recognition on Mobile DevicesÉvaluation : 1 sur 5 étoiles1/5 (1)
- Summer Training Report Line Following Robot Bachelor of Technology ECE (2010-14)Document38 pagesSummer Training Report Line Following Robot Bachelor of Technology ECE (2010-14)Ashutosh DabasPas encore d'évaluation
- Introduction To MicrocontrollersDocument3 pagesIntroduction To MicrocontrollersRohit BaranwalPas encore d'évaluation
- Eex4436 Assignment 01. 416960756Document18 pagesEex4436 Assignment 01. 416960756RusHan SenavirathnaPas encore d'évaluation
- PC Interfacing Fourth Level Lecture Eight RS232 To PIC Microcontroller InterfaceDocument15 pagesPC Interfacing Fourth Level Lecture Eight RS232 To PIC Microcontroller Interfaceأسامة المياحيPas encore d'évaluation
- Embedded SystemDocument39 pagesEmbedded SystemPawan KumawatPas encore d'évaluation
- Air Brake House CouplingDocument4 pagesAir Brake House CouplingcoolmaleankurPas encore d'évaluation
- Misra CDocument59 pagesMisra CcoolmaleankurPas encore d'évaluation
- Angle CockesDocument4 pagesAngle CockescoolmaleankurPas encore d'évaluation
- CC2500Document96 pagesCC2500bharatvishnuPas encore d'évaluation
- Line Follower Using 89s52Document16 pagesLine Follower Using 89s52coolmaleankurPas encore d'évaluation
- System Resets, Interrupts, and Operating Modes, System Control Module (SYS)Document269 pagesSystem Resets, Interrupts, and Operating Modes, System Control Module (SYS)coolmaleankurPas encore d'évaluation
- Onboard Pin ConnectionsDocument2 pagesOnboard Pin ConnectionscoolmaleankurPas encore d'évaluation
- Source CodeDocument5 pagesSource CodecoolmaleankurPas encore d'évaluation
- MSP 430Document18 pagesMSP 430Predrag BukovecPas encore d'évaluation
- PCB DesignDocument1 pagePCB DesigncoolmaleankurPas encore d'évaluation
- SoftwareDocument1 pageSoftwarecoolmaleankurPas encore d'évaluation
- Circuit DiagramDocument3 pagesCircuit DiagramcoolmaleankurPas encore d'évaluation
- L 293 DDocument1 pageL 293 DcoolmaleankurPas encore d'évaluation
- LogicDocument2 pagesLogiccoolmaleankurPas encore d'évaluation
- DC MotorDocument6 pagesDC MotorcoolmaleankurPas encore d'évaluation
- What Is Isp?Document2 pagesWhat Is Isp?coolmaleankurPas encore d'évaluation
- IntroductionDocument1 pageIntroductioncoolmaleankurPas encore d'évaluation
- Function of orDocument1 pageFunction of orcoolmaleankurPas encore d'évaluation
- Fore WardDocument1 pageFore WardcoolmaleankurPas encore d'évaluation
- Infrared SensorsDocument6 pagesInfrared SensorscoolmaleankurPas encore d'évaluation
- Block DiagramDocument1 pageBlock DiagramcoolmaleankurPas encore d'évaluation
- ControllerDocument4 pagesControllercoolmaleankurPas encore d'évaluation
- Data Structures and Algorithms: (CS210/ESO207/ESO211)Document23 pagesData Structures and Algorithms: (CS210/ESO207/ESO211)Moazzam HussainPas encore d'évaluation
- Pmled 6 5K 10a 66Document6 pagesPmled 6 5K 10a 66Eduardo SalgadoPas encore d'évaluation
- Grade 11 Electricity W.sheetDocument6 pagesGrade 11 Electricity W.sheetUsman AmeenPas encore d'évaluation
- High Efficiency Multijunction Solar Cells For Large Scale Solar Electricity Generation KurtzDocument29 pagesHigh Efficiency Multijunction Solar Cells For Large Scale Solar Electricity Generation Kurtzn1261984Pas encore d'évaluation
- Chapter 4. FRC Manufacturing - Fundamental ConceptsDocument5 pagesChapter 4. FRC Manufacturing - Fundamental ConceptsNarendra GadkariPas encore d'évaluation
- Ii.7.2 Alat Kedokteran 2 PDFDocument153 pagesIi.7.2 Alat Kedokteran 2 PDFAguesBudi S TalawangPas encore d'évaluation
- Rail Mechanical PropertiesDocument46 pagesRail Mechanical PropertiesAGnes Stephani MunthePas encore d'évaluation
- Deep Bar and Double Cage 010223Document20 pagesDeep Bar and Double Cage 010223Debankan ChatterjeePas encore d'évaluation
- Owatch VR Games Quotation - 2017!4!24Document3 pagesOwatch VR Games Quotation - 2017!4!24ali4957270Pas encore d'évaluation
- Ds 50 BrochureDocument2 pagesDs 50 BrochureRaulMesaPas encore d'évaluation
- Assignment 2 Ce Law Ethics Contracts Midterm - 103742Document13 pagesAssignment 2 Ce Law Ethics Contracts Midterm - 103742Myka SanchezPas encore d'évaluation
- Grasshopper Optimization Algorithm Based Design of StructuresDocument1 pageGrasshopper Optimization Algorithm Based Design of Structuresinvisible25Pas encore d'évaluation
- Deep Drive - Customer Interface in AR - Oracle Apps EpicenterDocument38 pagesDeep Drive - Customer Interface in AR - Oracle Apps Epicenterjeetu_87Pas encore d'évaluation
- Sony FDR AX1 - E ProDocument68 pagesSony FDR AX1 - E ProTodorPas encore d'évaluation
- Ohm's Law and Kirchhoff's LawsDocument22 pagesOhm's Law and Kirchhoff's LawsTiarra MojelPas encore d'évaluation
- Series 3501 & 3503Document4 pagesSeries 3501 & 3503Tim Stubbs100% (2)
- DSTV Channel PublicDocument3 pagesDSTV Channel PublicCalvin MulaudziPas encore d'évaluation
- Table 1. Data Set and CalculationDocument5 pagesTable 1. Data Set and CalculationliliPas encore d'évaluation
- 1Z0 053 PDFDocument36 pages1Z0 053 PDFOscarRamirezPas encore d'évaluation
- Pre Accion PDFDocument8 pagesPre Accion PDFjhoger2012Pas encore d'évaluation
- Netapp Cabling and Hardware BasicsDocument14 pagesNetapp Cabling and Hardware BasicsAnup AbhishekPas encore d'évaluation
- PD 8010 2 Presentation April 2005 NewDocument40 pagesPD 8010 2 Presentation April 2005 NewSuphi YükselPas encore d'évaluation
- Digital Joints Solutions - Sep-2016-CatalogueDocument102 pagesDigital Joints Solutions - Sep-2016-CatalogueiamlpPas encore d'évaluation
- Build Your First Mobile Flex Application: Lab ExercisesDocument37 pagesBuild Your First Mobile Flex Application: Lab ExercisesSrdjan MarjanovicPas encore d'évaluation
- Electric Circuits 10th Edition Nilsson Solutions ManualDocument89 pagesElectric Circuits 10th Edition Nilsson Solutions ManualKimCoffeyjndf100% (41)
- SJ-20121112095141-003-LTE (V3.10.10) Alarm Handling (FDD) PDFDocument338 pagesSJ-20121112095141-003-LTE (V3.10.10) Alarm Handling (FDD) PDFRahul SharmaPas encore d'évaluation
- Euro Tempered Glass Industries Corp. - Company ProfileDocument18 pagesEuro Tempered Glass Industries Corp. - Company Profileunited harvest corpPas encore d'évaluation
- Cap Screws: Sae J429 Grade IdentificationDocument6 pagesCap Screws: Sae J429 Grade IdentificationHomer SilvaPas encore d'évaluation