Vous aimerez peut-être aussi
- Flip FlopsDocument16 pagesFlip FlopsVictor Hugo López CanPas encore d'évaluation
- Practica #1 Grafcet SemáforosDocument5 pagesPractica #1 Grafcet SemáforosRicardo ChanPas encore d'évaluation
- Diseño de automatismos con GrafcetDocument57 pagesDiseño de automatismos con GrafcetHectorSandovalPas encore d'évaluation
- Buses industriales guía prácticasDocument13 pagesBuses industriales guía prácticasKaarrlozz100% (1)
- infoPLC Net Guia 8 Interfaces Maquinas Humano PDFDocument27 pagesinfoPLC Net Guia 8 Interfaces Maquinas Humano PDFFelipeAlfonsoMuñozMorenoPas encore d'évaluation
- Analisis Daq 6008Document5 pagesAnalisis Daq 6008api-3722750100% (3)
- Elt 3890 Automatica I Laboratorio No. 7 Programación de PLC S s7-1200 SiemensDocument17 pagesElt 3890 Automatica I Laboratorio No. 7 Programación de PLC S s7-1200 SiemensGino LaquiPas encore d'évaluation
- Ejercicos de PLC 1Document6 pagesEjercicos de PLC 1gilberttPas encore d'évaluation
- RE-10-LAB-141 ELECTRONICA DE POTENCIA v7 PDFDocument37 pagesRE-10-LAB-141 ELECTRONICA DE POTENCIA v7 PDFMISPas encore d'évaluation
- Contadores Digitales PDFDocument14 pagesContadores Digitales PDFErick Jesús Rodríguez DávilaPas encore d'évaluation
- Guía Introducción PLC S7-1200Document3 pagesGuía Introducción PLC S7-1200Beli Sofia Calzada AlmercoPas encore d'évaluation
- Automatización reactor químicoDocument10 pagesAutomatización reactor químicoangarrui99Pas encore d'évaluation
- Guia 02 Taladro SemiautomatizadoDocument4 pagesGuia 02 Taladro SemiautomatizadoDavid ChisaguanoPas encore d'évaluation
- Uso de Contactores de Estado SólidoDocument4 pagesUso de Contactores de Estado SólidoDarío GarcíaPas encore d'évaluation
- Clase 15Document4 pagesClase 15Divar CamposPas encore d'évaluation
- Ejercicios SFC PDFDocument38 pagesEjercicios SFC PDFmwueaqpPas encore d'évaluation
- GSK980TDa (Spanish)Document11 pagesGSK980TDa (Spanish)Ever Maunas WidmerPas encore d'évaluation
- Control de ascensor HMIDocument32 pagesControl de ascensor HMIJuan Pablo PoloPas encore d'évaluation
- Laboratorio de Actuadores-Arrancador Suave y Variador de VelocidadDocument9 pagesLaboratorio de Actuadores-Arrancador Suave y Variador de VelocidadJhon Taylor Usma Hurtado100% (1)
- Ejercicios PLC 1 y 2Document9 pagesEjercicios PLC 1 y 2Joffre Calvopiña SegoviaPas encore d'évaluation
- Morajhonattan SensoresDocument42 pagesMorajhonattan SensoresJhonatan MoraPas encore d'évaluation
- 7 Grafcet (Ii) - Programación de Un Cruce Regulado Por Semáforo.Document15 pages7 Grafcet (Ii) - Programación de Un Cruce Regulado Por Semáforo.Alfredo GuzPas encore d'évaluation
- Practica. Dosificador Mezclador AutomáticoDocument2 pagesPractica. Dosificador Mezclador AutomáticoPatriciaBlázquezGarcía75% (4)
- Contador multi-instancia PLC S7-1200Document30 pagesContador multi-instancia PLC S7-1200Jorge VargasPas encore d'évaluation
- Informe LogixproDocument13 pagesInforme LogixproAna MantillaPas encore d'évaluation
- PLC Banda transportadora secuencia operacionesDocument6 pagesPLC Banda transportadora secuencia operacionesAby Valenzuela100% (1)
- Expulsion de Botellas Sin Tapon PDFDocument5 pagesExpulsion de Botellas Sin Tapon PDFNaidelinPas encore d'évaluation
- Introducción a los Microcontroladores PIC16F8XX: Aplicaciones, Periféricos y Programación BásicaDocument31 pagesIntroducción a los Microcontroladores PIC16F8XX: Aplicaciones, Periféricos y Programación BásicacarlosbuitronPas encore d'évaluation
- Reconocimiento del módulo de trabajo electroneumáticoDocument5 pagesReconocimiento del módulo de trabajo electroneumáticoPablo LopezPas encore d'évaluation
- Laboratorio PLC 1Document5 pagesLaboratorio PLC 1ORIANA ALEJANDRA SOLORZANO MARTINEZPas encore d'évaluation
- Manual 385503P Caudalimetro Signet 8550-3 Transmisor de Flujo PDFDocument8 pagesManual 385503P Caudalimetro Signet 8550-3 Transmisor de Flujo PDFArnaldo BenitezPas encore d'évaluation
- Eeid Eeid-419 Trabajofinaleduardo2023eDocument5 pagesEeid Eeid-419 Trabajofinaleduardo2023eEduardo Donovan Calle SulcaPas encore d'évaluation
- Conexión ShuntDocument4 pagesConexión ShuntVin RiioPas encore d'évaluation
- Aplicaciones de Variadores de VelocidadDocument17 pagesAplicaciones de Variadores de VelocidadFranco Follano p.63% (8)
- Pendulo InvertidoDocument6 pagesPendulo InvertidoCarlos ReyesPas encore d'évaluation
- PLC N ADocument8 pagesPLC N AALEX OSWALDOPas encore d'évaluation
- Proyecto Final AscensorDocument10 pagesProyecto Final AscensorFaurer127100% (1)
- Práctica 9 - Variadores de VelocidadDocument8 pagesPráctica 9 - Variadores de VelocidadAnonymous fdPbxTWIPas encore d'évaluation
- Boletines UD2 - Parte 2 - SSP - Automata Programable S7-300 Basico - ResueltoDocument55 pagesBoletines UD2 - Parte 2 - SSP - Automata Programable S7-300 Basico - ResueltoJulio Ignacio Costas ÁlvarezPas encore d'évaluation
- Manual Lvdac EmsDocument69 pagesManual Lvdac EmsGuerrero Pegariuz Pineda IglesiasPas encore d'évaluation
- Mando de un cilindro de doble efecto con retorno temporizadoDocument7 pagesMando de un cilindro de doble efecto con retorno temporizadoAngelicaGalindoPas encore d'évaluation
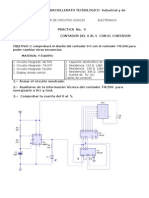
- Practica 9 Contador 0-5 Con El 74LS90Document2 pagesPractica 9 Contador 0-5 Con El 74LS90Gianfranco SatoPas encore d'évaluation
- Comparador de VentanaDocument3 pagesComparador de VentanaCarlos OlivoPas encore d'évaluation
- PLC Logo v8.2Document4 pagesPLC Logo v8.2Luis MizqueroPas encore d'évaluation
- GRAFCET7Document50 pagesGRAFCET7jaimeasisa100% (1)
- Regulación Del Motor de Inducción Por TiristoresDocument20 pagesRegulación Del Motor de Inducción Por TiristoresLuis Fernando Amézquita100% (1)
- Automatización de Máquinas Eléctricas PDFDocument2 pagesAutomatización de Máquinas Eléctricas PDFJulioPas encore d'évaluation
- Practica 9 Control IndustrialDocument1 pagePractica 9 Control IndustrialSebastian TrujilloPas encore d'évaluation
- Configuración Salidas PLC Delta SX2Document6 pagesConfiguración Salidas PLC Delta SX2Javier CamachoPas encore d'évaluation
- Modulo Epc y DaqDocument4 pagesModulo Epc y DaqroriguolPas encore d'évaluation
- Experiencia 3Document8 pagesExperiencia 3Ronal HbPas encore d'évaluation
- Diseño de controladores PIDDocument8 pagesDiseño de controladores PIDChuy LopezPas encore d'évaluation
- Teoría de Control y RobóticaDocument6 pagesTeoría de Control y RobóticaRicardo Páramo BernalPas encore d'évaluation
- Control PID de motores DCDocument6 pagesControl PID de motores DCNiko Garcia MeythalerPas encore d'évaluation
- Guia Lab Control PUCV-PIDDocument16 pagesGuia Lab Control PUCV-PIDManuel OyarzoPas encore d'évaluation
- Compensador Proporcional Integrativo Derivativo PidDocument6 pagesCompensador Proporcional Integrativo Derivativo PidADEMIR SANCHEZ RODRIGUEZPas encore d'évaluation
- Percy Mamani Soncco Control1Document13 pagesPercy Mamani Soncco Control1Anonymous MMLzZjbyPas encore d'évaluation
- Ingeniería de Control IdDocument27 pagesIngeniería de Control IdRony Ynoquio RosalesPas encore d'évaluation
- Nivelador de Luz - ReporteDocument11 pagesNivelador de Luz - ReporteDiego Alonso RodriguezPas encore d'évaluation
- Instalación de equipos y elementos de sistemas de automatización industrial. ELEM0311D'EverandInstalación de equipos y elementos de sistemas de automatización industrial. ELEM0311Évaluation : 2 sur 5 étoiles2/5 (1)
- Simulador de procesos industrialesDocument25 pagesSimulador de procesos industrialesFranzua Le Rennard Oblitas AristondoPas encore d'évaluation
- Aplicaciones Con Raspberry PiDocument6 pagesAplicaciones Con Raspberry PiFranzua Le Rennard Oblitas AristondoPas encore d'évaluation
- Puerto Serial Con Matlab y PIC 16F877ADocument5 pagesPuerto Serial Con Matlab y PIC 16F877AFranzua Le Rennard Oblitas Aristondo100% (2)
- Medidor de TemperaturaDocument5 pagesMedidor de TemperaturaFranzua Le Rennard Oblitas AristondoPas encore d'évaluation
- Centrifugadora de papas fritas extrae aceite en 30 segundosDocument54 pagesCentrifugadora de papas fritas extrae aceite en 30 segundosAlejandro Ochoa100% (4)
- Boquillas cierre máquina embalajeDocument5 pagesBoquillas cierre máquina embalajeCamilo Jose Atehortua QuicenoPas encore d'évaluation
- Apuntes de Dibujo de Proyectos FINALDocument6 pagesApuntes de Dibujo de Proyectos FINALFredy MamaniPas encore d'évaluation
- Mecánica de Fluidos, Definición y Aplicaciones.Document28 pagesMecánica de Fluidos, Definición y Aplicaciones.RENATO JAIR COSTA MINGAPas encore d'évaluation
- Lma16-0136 - Balanza 15000GDocument4 pagesLma16-0136 - Balanza 15000GAnonymous m4FpH1Pas encore d'évaluation
- 27 +templabilidadDocument30 pages27 +templabilidadDavid Zepeda SotoPas encore d'évaluation
- Informe de Laboratoro Conduccion UnidimensionalDocument2 pagesInforme de Laboratoro Conduccion UnidimensionalManuel CardozoPas encore d'évaluation
- Evidencia 1 CarbonoDocument4 pagesEvidencia 1 CarbonoJania SánchezPas encore d'évaluation
- Cooper PracticaDocument1 pageCooper PracticaWILLIAM YOEL PARI CUTIPAPas encore d'évaluation
- Distribuciones de probabilidad en práctica 1Document20 pagesDistribuciones de probabilidad en práctica 1CAMEVA50% (2)
- Series de pagos y alternativas financierasDocument4 pagesSeries de pagos y alternativas financierasNico PedrazaPas encore d'évaluation
- Interacción Nuclear Fuerte - Wikipedia, La Enciclopedia LibreDocument26 pagesInteracción Nuclear Fuerte - Wikipedia, La Enciclopedia LibreOmar SánchezPas encore d'évaluation
- Trabajo 2-3 Estadistica Jhohan Quispe VilcaDocument36 pagesTrabajo 2-3 Estadistica Jhohan Quispe VilcaElvis Chancayauri Ylachoque100% (1)
- Taller 2 Grupo 54Document7 pagesTaller 2 Grupo 54JeissonPas encore d'évaluation
- Ip1 SMDDDocument3 pagesIp1 SMDDdiego SPas encore d'évaluation
- Matriz BAFI MetodologiaDocument5 pagesMatriz BAFI MetodologiaMaritere ValenciaPas encore d'évaluation
- LocomotoraDocument29 pagesLocomotoraFabio RomeroPas encore d'évaluation
- El S7 200 en Una HoraDocument55 pagesEl S7 200 en Una HoraJesus VillalobosPas encore d'évaluation
- C00204 4 2013 C EmailDocument112 pagesC00204 4 2013 C EmailCarlosEduardoAcostaMateusPas encore d'évaluation
- Ejercicios Analisis Estructural IDocument17 pagesEjercicios Analisis Estructural IVICTOR DAGA MENDOZAPas encore d'évaluation
- Población y MuestraDocument8 pagesPoblación y MuestraJosé NavarroPas encore d'évaluation
- CatapultaDocument3 pagesCatapultaJunior Ademir Flores VargasPas encore d'évaluation
- Laboratorio Nro 12 Sistemas de Primer OrdenDocument6 pagesLaboratorio Nro 12 Sistemas de Primer OrdenJOAQUIN ALESSANDRO CABRERA CHAMORROPas encore d'évaluation
- Historia Mecánica FluidosDocument2 pagesHistoria Mecánica Fluidosnelson valenciaPas encore d'évaluation
- Trabajo Conservacion de Los AlimentosDocument12 pagesTrabajo Conservacion de Los Alimentosmarilyn2182Pas encore d'évaluation
- Unidad Didáctica #01: "Conocemos Nuestro Índice de Masa Corporal"Document5 pagesUnidad Didáctica #01: "Conocemos Nuestro Índice de Masa Corporal"ELIZABETH DE LA CRUZ LIBERATOPas encore d'évaluation
- Lab05 FuenteAlimentaciónReguladaCircuitosIntegrados (R)Document9 pagesLab05 FuenteAlimentaciónReguladaCircuitosIntegrados (R)Joaquin SalazarPas encore d'évaluation
- Informe Pruebas Carbohidratos BioquímicaDocument12 pagesInforme Pruebas Carbohidratos BioquímicaDanier Munoz BuitronPas encore d'évaluation
- Ejercicios CroclipDocument4 pagesEjercicios CroclipJavier Nolasco ArguetaPas encore d'évaluation