Vous aimerez peut-être aussi
- Dimensionamento de HelicesDocument13 pagesDimensionamento de HelicesKamilla Friás100% (1)
- Atividade de Recuperação Paralela 3 AnoDocument1 pageAtividade de Recuperação Paralela 3 AnofelupealmeidqPas encore d'évaluation
- Questões AL 1.1Document2 pagesQuestões AL 1.1Diogo AlexandrePas encore d'évaluation
- Fisico Quimica ADocument51 pagesFisico Quimica AGisa Jacques100% (2)
- Acesso VenosoDocument25 pagesAcesso VenosoRodrigo Cruz100% (1)
- Verificando MD5 e SHA-256 de Arquivos Pelo Terminal No LinuxDocument3 pagesVerificando MD5 e SHA-256 de Arquivos Pelo Terminal No LinuxMarcos PaparaziPas encore d'évaluation
- DBF para SisvarDocument3 pagesDBF para SisvarEdi Alves PurificaçãoPas encore d'évaluation
- Teste - MecânicaDocument6 pagesTeste - MecânicaLuciana SilvaPas encore d'évaluation
- Nivelamento - Eletricidade BásicaDocument52 pagesNivelamento - Eletricidade BásicaNayara MercesPas encore d'évaluation
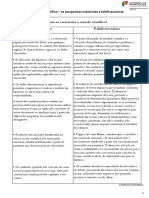
- O Metodo Cientifico Nas Perspetiva Indutivista e FalsificacionistaDocument2 pagesO Metodo Cientifico Nas Perspetiva Indutivista e Falsificacionistalulu laranjeiraPas encore d'évaluation
- SO InformáticaDocument39 pagesSO InformáticaDavi OliveiraPas encore d'évaluation
- Rev 03Document285 pagesRev 03William Dos SantosPas encore d'évaluation
- 6 Argumentos Teistas Contemporâneos PDFDocument15 pages6 Argumentos Teistas Contemporâneos PDFzwinglioPas encore d'évaluation
- Componentes Do Tubo de Raios X - Fisica Da RadiologiaDocument16 pagesComponentes Do Tubo de Raios X - Fisica Da RadiologiajacksongalvaoPas encore d'évaluation
- 2 Lista de Exercícios de Química Do 3o Ano (2013)Document6 pages2 Lista de Exercícios de Química Do 3o Ano (2013)Valério LondePas encore d'évaluation
- Aula 1 2 e 3 - Etiopatogênese Geral Das LesõesDocument21 pagesAula 1 2 e 3 - Etiopatogênese Geral Das Lesõescamilla fPas encore d'évaluation
- AVALIAÇÃO BIMESTRAL DE FISICA - 2º Bimestre - 3º AnoDocument4 pagesAVALIAÇÃO BIMESTRAL DE FISICA - 2º Bimestre - 3º AnoÉder MunizPas encore d'évaluation
- Soraya Dar EghmaDocument325 pagesSoraya Dar EghmarksouthPas encore d'évaluation
- Estruturas Metálicas - Dimensionamento À Tração: Disciplina: Projeto de Instalações Hidráulicas Prof. Msc. Igor LimaDocument69 pagesEstruturas Metálicas - Dimensionamento À Tração: Disciplina: Projeto de Instalações Hidráulicas Prof. Msc. Igor LimaALAN DOURADO DE CASTROPas encore d'évaluation
- 6º Caderno de Matemátca - 7º AnoDocument12 pages6º Caderno de Matemátca - 7º AnoJacky Riquielme100% (1)
- Fundamentos Da HarmoniaDocument108 pagesFundamentos Da HarmoniaJoao Roberto Pereira100% (3)
- NBR Iec 60079-28Document37 pagesNBR Iec 60079-28Lugo EngenhariaPas encore d'évaluation
- Aula 2 Eletroquímica (Modo de Compatibilidade)Document43 pagesAula 2 Eletroquímica (Modo de Compatibilidade)Ronan MullerPas encore d'évaluation
- D2 Matemática SAEB - PENSE EXATODocument43 pagesD2 Matemática SAEB - PENSE EXATOfbmendesPas encore d'évaluation
- Escala de Vulnerabilidade ... Stresse No Trabalho (Document19 pagesEscala de Vulnerabilidade ... Stresse No Trabalho (Lenisa Veiga100% (1)
- 4GL Manual PDFDocument65 pages4GL Manual PDFMaique AlmeidaPas encore d'évaluation
- De Stijl ManifestoDocument2 pagesDe Stijl ManifestoRogeri O LiveiraPas encore d'évaluation
- Memorial Descritivo AutomaçãoDocument13 pagesMemorial Descritivo AutomaçãoregfsdgfPas encore d'évaluation
- Brousseau G. SlidesDocument67 pagesBrousseau G. SlidesE_RCARVALHO100% (1)
- Potência Máquinas Metais, Cabos e CobreDocument3 pagesPotência Máquinas Metais, Cabos e CobreadailsonPas encore d'évaluation