Vous aimerez peut-être aussi
- Coeducando para una ciudadanía en igualdadD'EverandCoeducando para una ciudadanía en igualdadÉvaluation : 5 sur 5 étoiles5/5 (1)
- Microsoft PowerPoint - Prob - VI - Prob - 6Document8 pagesMicrosoft PowerPoint - Prob - VI - Prob - 6Samuel MuriaPas encore d'évaluation
- Informe Laboratorio de MonitoresDocument6 pagesInforme Laboratorio de MonitoresMaria Angelica RuizPas encore d'évaluation
- Control N°01 Concreto Presforzado - 2022-1Document2 pagesControl N°01 Concreto Presforzado - 2022-1Paolorex777Pas encore d'évaluation
- Ecuacion de Schrodinger II PDFDocument27 pagesEcuacion de Schrodinger II PDFAnderson Yepes MuñozPas encore d'évaluation
- PC2 - Topografía - GRUPO 1 - 2021-2Document8 pagesPC2 - Topografía - GRUPO 1 - 2021-2EisthenPas encore d'évaluation
- Contador 74LS193 y display de 7 segmentosDocument10 pagesContador 74LS193 y display de 7 segmentosJosé DelgadoPas encore d'évaluation
- Clase I. Sistema de Recolección de Aguas NegrasDocument43 pagesClase I. Sistema de Recolección de Aguas NegrasEdwin HurtadoPas encore d'évaluation
- Mediciones y pruebas esenciales amplificador estéreoDocument9 pagesMediciones y pruebas esenciales amplificador estéreoPablo PedrozaPas encore d'évaluation
- Trabajo Practico N°1-Modelo y SimulacionDocument23 pagesTrabajo Practico N°1-Modelo y Simulacionjeat34Pas encore d'évaluation
- SEGUNDO EXAMEN DE TURBO MAQUINAS 2020resagadosDocument6 pagesSEGUNDO EXAMEN DE TURBO MAQUINAS 2020resagadosCesar GuuzPas encore d'évaluation
- CONTADOR BINARIO ASCENDENTE/DESCENDENTE DE 4 BITS CON DISPLAYDocument12 pagesCONTADOR BINARIO ASCENDENTE/DESCENDENTE DE 4 BITS CON DISPLAYAdrian Antonio Sosa SolisPas encore d'évaluation
- Práctica 3 - Contador DescendenteDocument16 pagesPráctica 3 - Contador DescendenteUES ALANPas encore d'évaluation
- 3.S6 HT Ecuacion de La Recta y Aplicaciones MBING 2017 2Document2 pages3.S6 HT Ecuacion de La Recta y Aplicaciones MBING 2017 2Olmer Vega CruzPas encore d'évaluation
- Acoplador de Tierra A Campo M-3921Document1 pageAcoplador de Tierra A Campo M-3921Maicol Luna100% (1)
- Antiderivada e Integral Corregida-Analisis 1Document6 pagesAntiderivada e Integral Corregida-Analisis 1Melissa SánchezPas encore d'évaluation
- Principal ResueltoDocument4 pagesPrincipal ResueltoManuel GuamanPas encore d'évaluation
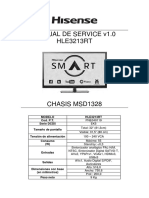
- HLE3213RTDocument38 pagesHLE3213RTJose Maria SantiagoPas encore d'évaluation
- Teoria Clase Metrados 2021-1Document20 pagesTeoria Clase Metrados 2021-1Heysell BenaventePas encore d'évaluation
- Control 2: CI6101-Procesos de Transporte Profesores: Juvenal Letelier, Alberto de La FuenteDocument4 pagesControl 2: CI6101-Procesos de Transporte Profesores: Juvenal Letelier, Alberto de La FuenteHugoPas encore d'évaluation
- Ejercicios ElectrónicaDocument16 pagesEjercicios ElectrónicaRobert Comas GarciaPas encore d'évaluation
- Taller de Cinetica UNSADocument30 pagesTaller de Cinetica UNSAadrianmt410% (1)
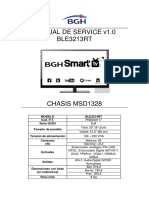
- BGH - BLE3213RT - Chasis MSD1328 - Manual ServiceDocument38 pagesBGH - BLE3213RT - Chasis MSD1328 - Manual Servicejose4445Pas encore d'évaluation
- Métodos Matemáticos Examen #2 S1 2021Document1 pageMétodos Matemáticos Examen #2 S1 2021Rafael AlasPas encore d'évaluation
- ElipseDocument6 pagesElipseBrian Herrera TravezañoPas encore d'évaluation
- MSolidos 2020 02 Parcial1Document5 pagesMSolidos 2020 02 Parcial1Mariana Mahecha SuarezPas encore d'évaluation
- Hh113i Es2020 IDocument4 pagesHh113i Es2020 IRenán SuárezPas encore d'évaluation
- MXTM-Esquema General de Fibra-7ADocument6 pagesMXTM-Esquema General de Fibra-7AAmaury OchoaPas encore d'évaluation
- Eq6 LogicaSecuencia 4SBDocument12 pagesEq6 LogicaSecuencia 4SBYahir ArceoPas encore d'évaluation
- Ejercicios Circuitos ElectricosDocument3 pagesEjercicios Circuitos ElectricosIvan MorettPas encore d'évaluation
- MangoDocument5 pagesMangoEliud OrnelasPas encore d'évaluation
- EDG2019 2 Lista de Exercicios 2Document3 pagesEDG2019 2 Lista de Exercicios 2LucasPeerMartinsPas encore d'évaluation
- MultiplexorDocument8 pagesMultiplexorMartin HernandezPas encore d'évaluation
- Conteo de FigurasDocument8 pagesConteo de FigurasOscar Chunga83% (12)
- Examen 2a - Sicodii - EspejolucanasDocument3 pagesExamen 2a - Sicodii - EspejolucanasRenzo EspejoPas encore d'évaluation
- Teorema de PitagorasDocument9 pagesTeorema de PitagorasAlejandro Enrique ChanganaquiPas encore d'évaluation
- GOF EasyfitDocument9 pagesGOF EasyfitSalvador MolinaPas encore d'évaluation
- Ensayo de Deflexion.2Document8 pagesEnsayo de Deflexion.2Sergio S. Zegarra TumiPas encore d'évaluation
- Proyecto instalaciones pluviales casa JicaltepecDocument7 pagesProyecto instalaciones pluviales casa JicaltepecJuan Carlos Peralta SánchezPas encore d'évaluation
- Ecvv U2 A2 JaqmDocument7 pagesEcvv U2 A2 JaqmJavier Quintero MonsivaisPas encore d'évaluation
- Matemc3a1tica B TP 1 Marzo 2018Document6 pagesMatemc3a1tica B TP 1 Marzo 2018Xavier Jorge100% (1)
- OrbitasCiclos - Control No LinealDocument37 pagesOrbitasCiclos - Control No LinealSERGIO DANIEL CASTRO ALIAGAPas encore d'évaluation
- Cuestionario ResultadosDocument8 pagesCuestionario ResultadosLeonel JacomePas encore d'évaluation
- Habilidad operativa: ejercicios resueltosDocument4 pagesHabilidad operativa: ejercicios resueltosCesar Vital50% (2)
- Problemas Resueltos Tracción-CompresiónDocument0 pageProblemas Resueltos Tracción-CompresióngustmaxPas encore d'évaluation
- Técnicas de muestreo en inventarios forestalesDocument4 pagesTécnicas de muestreo en inventarios forestalesBrandon Mercado EspinozaPas encore d'évaluation
- Ecuacuón de La RectaDocument16 pagesEcuacuón de La RectaAngie Grados MarquinaPas encore d'évaluation
- Examen Parcial 2 CE2 2S2019Document4 pagesExamen Parcial 2 CE2 2S2019Alejandro Benavides AlvaradoPas encore d'évaluation
- Ua 4 PDFDocument18 pagesUa 4 PDFAbelesteban EspinozaPas encore d'évaluation
- Control DigitalDocument5 pagesControl DigitalZes ToalaPas encore d'évaluation
- MSolidos2020 01 P1Document6 pagesMSolidos2020 01 P1Mariana Mahecha SuarezPas encore d'évaluation
- Ejercicios Semana10Document3 pagesEjercicios Semana10marco cruzPas encore d'évaluation
- Funciones - ElementalesasdDocument12 pagesFunciones - ElementalesasdBenjamin RiquelmePas encore d'évaluation
- Matemática para las Ciencias Sociales: Práctica Calificada N° 01Document2 pagesMatemática para las Ciencias Sociales: Práctica Calificada N° 01Alicia ManzanedaPas encore d'évaluation
- PC 01 Mate CC - SS 2018-2Document2 pagesPC 01 Mate CC - SS 2018-2Estefanía BernaolaPas encore d'évaluation
- Examen 2Q Matematicas 1ro B.Document5 pagesExamen 2Q Matematicas 1ro B.Josué IsraelPas encore d'évaluation
- Funciones TrigonométricasDocument3 pagesFunciones TrigonométricasAdrianaNortePas encore d'évaluation
- Tarea 7 257667Document20 pagesTarea 7 257667The3edzon XDPas encore d'évaluation
- Capitulo IiDocument56 pagesCapitulo IiEsteban Correa LeonPas encore d'évaluation
- HT Sem-04 Comma Ing WaDocument2 pagesHT Sem-04 Comma Ing WaJack AlaricoPas encore d'évaluation
- Guia 2.2 ARTISTICA GRADO 11Document5 pagesGuia 2.2 ARTISTICA GRADO 11Lucy Yaneth FrancoPas encore d'évaluation
- Caso Practico U1, OyGDocument8 pagesCaso Practico U1, OyGBackground TeamPas encore d'évaluation
- El Primer Libro de Adan y EvaDocument62 pagesEl Primer Libro de Adan y EvamarcosdinellaPas encore d'évaluation
- Tarea Semana 4 TeoriasDocument5 pagesTarea Semana 4 TeoriasAbigail ChidoriPas encore d'évaluation
- Espacios-Ana Kely Andrade Q.Document15 pagesEspacios-Ana Kely Andrade Q.Kely AndradePas encore d'évaluation
- Antropología Filosófica: Introducción al Estudio del Ser HumanoDocument22 pagesAntropología Filosófica: Introducción al Estudio del Ser Humanoscholasticus2Pas encore d'évaluation
- Ventajas y Desventajas Del To Lateral y ContingenteDocument6 pagesVentajas y Desventajas Del To Lateral y ContingenteeusebiobloodyroarPas encore d'évaluation
- 27 de Marzo - Filosofia y CristianismoDocument23 pages27 de Marzo - Filosofia y CristianismoGabriela Rodriguez CaldasPas encore d'évaluation
- Pre Informe 1 Laboratorio de Física 2Document4 pagesPre Informe 1 Laboratorio de Física 2Juan David Arce MartinezPas encore d'évaluation
- EstimaciónSWDocument22 pagesEstimaciónSWGustavo LemosPas encore d'évaluation
- Capitulo 11 - Yo Aborrezco El DivorcioDocument5 pagesCapitulo 11 - Yo Aborrezco El DivorcioSofía G. Mac FarlanePas encore d'évaluation
- Sistemas de Encofrado - Entibación - ES W 02 1211Document24 pagesSistemas de Encofrado - Entibación - ES W 02 1211Samantha PowellPas encore d'évaluation
- Adm - 2017 - Investigación e Innovación Tecnológica - MaDocument68 pagesAdm - 2017 - Investigación e Innovación Tecnológica - MaIVAN HAROLD LAZO RAMOSPas encore d'évaluation
- Antologia de AniversarioDocument293 pagesAntologia de AniversarioNoelia Franco Comunicaciones100% (1)
- Examen Unidad 3 Regimen FiscalDocument7 pagesExamen Unidad 3 Regimen FiscalmariafPas encore d'évaluation
- Muri, Mura, Muda y Los 7 DesperdiciosDocument9 pagesMuri, Mura, Muda y Los 7 DesperdiciosVictor Hernandez ArchundiaPas encore d'évaluation
- Predicciones Ifá Cuba 2023Document10 pagesPredicciones Ifá Cuba 2023YeneyPas encore d'évaluation
- Semana de Reyes Mayos 9 Al 13 de EneroDocument8 pagesSemana de Reyes Mayos 9 Al 13 de EneroFernanda NolascoPas encore d'évaluation
- Escrito de Promocion de Pruebas en MaterDocument2 pagesEscrito de Promocion de Pruebas en MaterMaria NinoPas encore d'évaluation
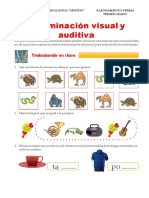
- Discriminación visual y auditivaDocument6 pagesDiscriminación visual y auditivaVia SajaPas encore d'évaluation
- Escuadrilla de La MuerteDocument4 pagesEscuadrilla de La Muerteisis0121mPas encore d'évaluation
- Mapa ZoroastroDocument1 pageMapa ZoroastroFernandoLopezbuitragoPas encore d'évaluation
- Antropología de La EducaciónDocument20 pagesAntropología de La EducaciónPedro MancholaPas encore d'évaluation
- Capítulos 1-2-3-5Document140 pagesCapítulos 1-2-3-5Vanessa CachagoPas encore d'évaluation
- Trabajo de Algoritmos FinalDocument282 pagesTrabajo de Algoritmos FinalBlairPas encore d'évaluation
- HonestidadDocument3 pagesHonestidadTiffany AmayaPas encore d'évaluation
- Plan tutorial sobre el valor del amorDocument7 pagesPlan tutorial sobre el valor del amorclia28Pas encore d'évaluation
- Retracto LegalDocument6 pagesRetracto LegalrebemlrPas encore d'évaluation
- Conociendo Mis EmocionesDocument7 pagesConociendo Mis EmocionesPastor Agustin Cervantes75% (4)
- Rúbrica de involucramiento estudiantilDocument5 pagesRúbrica de involucramiento estudiantilherbyn10Pas encore d'évaluation