Vous aimerez peut-être aussi
- Tinkercad | Pas à pas: Créer des objets 3D (CAO), schémas électroniques et apprendre à programmerD'EverandTinkercad | Pas à pas: Créer des objets 3D (CAO), schémas électroniques et apprendre à programmerPas encore d'évaluation
- Arduino | Pas à pas: Le guide ultime du débutantD'EverandArduino | Pas à pas: Le guide ultime du débutantPas encore d'évaluation
- Presentation Du Pic 16f877 PDFDocument22 pagesPresentation Du Pic 16f877 PDFhamzalabbou83% (6)
- Chapitre 2 Microcontroleur Pic 16f877Document8 pagesChapitre 2 Microcontroleur Pic 16f877Redouane AmianPas encore d'évaluation
- TP 5 Convertisseur ADC PDFDocument3 pagesTP 5 Convertisseur ADC PDFnawzat100% (8)
- Programmation Des PIC en C Part2Document34 pagesProgrammation Des PIC en C Part2marocainissamPas encore d'évaluation
- Formation PICDocument48 pagesFormation PICbking2380% (5)
- Projet À Microcontrôleur PIC 16F876ADocument12 pagesProjet À Microcontrôleur PIC 16F876Aهشام هشام المسيلة0% (1)
- Commande de Deux Moteurs Pas À Pas Via Le Port Paralléle Avec DelphiDocument51 pagesCommande de Deux Moteurs Pas À Pas Via Le Port Paralléle Avec DelphiHachemi Bhe83% (12)
- TP4 Simulation Microcontroleur PICDocument6 pagesTP4 Simulation Microcontroleur PICSalah Dahouathi100% (1)
- Expose MicrocontroleurDocument29 pagesExpose MicrocontroleurAssia Bakali88% (8)
- Cours Systemes Micro-Programmes Parti1Document43 pagesCours Systemes Micro-Programmes Parti1alkassoum100% (3)
- TP MicrocontrôleurDocument38 pagesTP MicrocontrôleurNourallah Aouina100% (3)
- TP1 Programmation en Assembleur PIC 16F84Document5 pagesTP1 Programmation en Assembleur PIC 16F84Rachid Rifai100% (1)
- TD MicrocontroleurDocument20 pagesTD MicrocontroleurMed100% (3)
- Chapitre I Microprocesseur 6809 GSEA12013Document56 pagesChapitre I Microprocesseur 6809 GSEA12013xanafahd78% (9)
- TP Systèmes À MicroContrôleurs - 2019 - 2020Document21 pagesTP Systèmes À MicroContrôleurs - 2019 - 2020Hadjer Bou0% (1)
- COURS ET TRAVAUX PRATIQUES de MICROPROCESSEURDocument151 pagesCOURS ET TRAVAUX PRATIQUES de MICROPROCESSEURهشام درياس100% (10)
- CoursmicroreduitDocument87 pagesCoursmicroreduitapi-3826166100% (2)
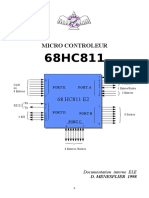
- 68 HC 11Document27 pages68 HC 11زهر الدين ضيفPas encore d'évaluation
- Thermométre À Base Du PIC16F877Document37 pagesThermométre À Base Du PIC16F877Hachemi Bhe87% (15)
- Pic 16 F 84Document14 pagesPic 16 F 84haithemo100% (21)
- Cmpte Rendu TP1Document15 pagesCmpte Rendu TP1groupe88100% (5)
- Projet Montre DigitaleDocument27 pagesProjet Montre DigitaleMalika Hamdi100% (1)
- VHDL Exercices Du CoursDocument16 pagesVHDL Exercices Du CoursNourallah Aouina57% (14)
- Microprocesseur 8086Document21 pagesMicroprocesseur 8086Terry Fian82% (11)
- Cours 8086Document53 pagesCours 8086babilonePas encore d'évaluation
- TP - Programmation D'un PIC Avec FlowcodeDocument15 pagesTP - Programmation D'un PIC Avec FlowcodeMaha BouattourPas encore d'évaluation
- Compte Rendu TP N°1Document7 pagesCompte Rendu TP N°1société ettrisiti oulad fares100% (1)
- Exercices Assembleur MEHDIDocument52 pagesExercices Assembleur MEHDIMehdi Amrani76% (21)
- TP N°1 M1 Embarqué MicrocontrôleurDocument2 pagesTP N°1 M1 Embarqué Microcontrôleurعمر الفاروقPas encore d'évaluation
- 1 Cours Microcontrôleur PIC 16F84Document23 pages1 Cours Microcontrôleur PIC 16F84shileykoss100% (2)
- Rapport PFEDocument36 pagesRapport PFEYoussef Raja100% (2)
- Examens Microprocesseur-Microcontrolleur PDFDocument48 pagesExamens Microprocesseur-Microcontrolleur PDFMeryem Berr100% (1)
- Chap2 Cortex STM32 GL3Document26 pagesChap2 Cortex STM32 GL3Med Taieb Ghodbane100% (1)
- Réalisation D'un Programmateur Des PICDocument52 pagesRéalisation D'un Programmateur Des PICnemraoui0% (1)
- Travaux Dirigés-Microprocesseur MicrocontroleurDocument18 pagesTravaux Dirigés-Microprocesseur MicrocontroleurFatima BettayebPas encore d'évaluation
- Compte Rendu Du TP PIC16F877 Par AIMANE BOURASSDocument13 pagesCompte Rendu Du TP PIC16F877 Par AIMANE BOURASSAyman Brs100% (1)
- 03 - Programmation en MikroCDocument123 pages03 - Programmation en MikroCMouna Soula71% (7)
- Chapitre 9 Les Timers en MikrocDocument14 pagesChapitre 9 Les Timers en MikrocRadwane LourhmatiPas encore d'évaluation
- Jeu D'instructions 16F84A 16F628A 16F88 16F876A 16F886Document4 pagesJeu D'instructions 16F84A 16F628A 16F88 16F876A 16F886MoprometheusPas encore d'évaluation
- Compte Rendu TP MicrocontrôleurDocument51 pagesCompte Rendu TP MicrocontrôleurSamir Salhi100% (1)
- Cours Microcontrôleurs-Tres ImportantDocument132 pagesCours Microcontrôleurs-Tres ImportantNabil Dakhli0% (1)
- Raspberry Pi | Pas à pas: Le guide du débutant avec les bases matériel, logiciel, et programmationD'EverandRaspberry Pi | Pas à pas: Le guide du débutant avec les bases matériel, logiciel, et programmationPas encore d'évaluation
- Les Pic 16F877Document14 pagesLes Pic 16F877Haythem FerjaniPas encore d'évaluation
- Chapitre III Fonctionnement de PIC 16F84Document24 pagesChapitre III Fonctionnement de PIC 16F84Sanae BOUNOUAPas encore d'évaluation
- Étude Et Réalisation D'un Dispositif D'ouverture Automatique D'un Garage Et D'éclairage Intelligent À Base D'un PICDocument32 pagesÉtude Et Réalisation D'un Dispositif D'ouverture Automatique D'un Garage Et D'éclairage Intelligent À Base D'un PICDina Tvadrovski75% (8)
- Calculateur Et InterfacageDocument18 pagesCalculateur Et InterfacageLynda MOKRANIPas encore d'évaluation
- Presentation Pic 16f84a - New1Document6 pagesPresentation Pic 16f84a - New1Davy Jean DrahaPas encore d'évaluation
- Rapport ÉclairageDocument29 pagesRapport ÉclairageHamza EL HASSAKPas encore d'évaluation
- MicroDocument4 pagesMicroKOUASSI INNOCENT YAOPas encore d'évaluation
- Uc-16F877 DIADocument14 pagesUc-16F877 DIAPapeCheikh SYLLAPas encore d'évaluation
- MODULE N°09 TLC-BTS MicrocontrôleursDocument28 pagesMODULE N°09 TLC-BTS MicrocontrôleursWalid MahmoudPas encore d'évaluation
- Chapitre 4Document37 pagesChapitre 4Ahmed JguirimPas encore d'évaluation
- Cours Microcontrôleur Microprocesseur 51Document18 pagesCours Microcontrôleur Microprocesseur 51NasriMohsenPas encore d'évaluation
- Chapitre IIDocument15 pagesChapitre IIdjamalooPas encore d'évaluation
- Pic 16F84 2Document40 pagesPic 16F84 2felkirPas encore d'évaluation
- chapitre 5 microcontroleursDocument28 pageschapitre 5 microcontroleursbenachour ismailPas encore d'évaluation
- Calculateur Et InterfacageDocument9 pagesCalculateur Et InterfacageWissam TizaPas encore d'évaluation
- Robotique Mobile - ENSTA ParisTechDocument164 pagesRobotique Mobile - ENSTA ParisTechHachemi BhePas encore d'évaluation
- Serrure de Sécurité Numérique À 3 CaractéresDocument18 pagesSerrure de Sécurité Numérique À 3 CaractéresHachemi BhePas encore d'évaluation
- Développement Et Implémentation D'une Méthode de Localisation Basée SLAM - BOUICHE HachemiDocument83 pagesDéveloppement Et Implémentation D'une Méthode de Localisation Basée SLAM - BOUICHE HachemiHachemi Bhe100% (1)
- Robotique MobileDocument78 pagesRobotique MobileHachemi Bhe100% (3)
- Thermométre À Base Du PIC16F877Document37 pagesThermométre À Base Du PIC16F877Hachemi Bhe87% (15)
- Asservissement de Position Et de Vitesse D'une Articulation RobotiqueDocument23 pagesAsservissement de Position Et de Vitesse D'une Articulation RobotiqueHachemi Bhe100% (9)
- Différentiation & Intégration NumériqueDocument20 pagesDifférentiation & Intégration NumériqueHachemi Bhe75% (4)
- La Compréssion JPEG D'images FixesDocument25 pagesLa Compréssion JPEG D'images FixesHachemi Bhe100% (17)
- Détecteur de Niveau D'eau de Lave-GlaceDocument70 pagesDétecteur de Niveau D'eau de Lave-GlaceHachemi Bhe83% (12)
- Automatisation Et Contrôle Des Trémies Portuaires Silos CevitalDocument133 pagesAutomatisation Et Contrôle Des Trémies Portuaires Silos CevitalHachemi Bhe100% (10)
- Boucle À Verrouillage de Phase (PLL)Document25 pagesBoucle À Verrouillage de Phase (PLL)Hachemi BhePas encore d'évaluation
- Etude Texturale Et Fractale Des Echos RadarDocument100 pagesEtude Texturale Et Fractale Des Echos RadarHachemi BhePas encore d'évaluation
- Commande de Deux Moteurs Pas À Pas Via Le Port Paralléle Avec DelphiDocument51 pagesCommande de Deux Moteurs Pas À Pas Via Le Port Paralléle Avec DelphiHachemi Bhe83% (12)
- Modélisation D'une Machine Asynchrone Par Réseau de NeuroneDocument29 pagesModélisation D'une Machine Asynchrone Par Réseau de NeuroneHachemi Bhe80% (10)
- Commande Numérique Basée Sur Le Placement de Pôles Des Procédés Linéaires À RetardDocument43 pagesCommande Numérique Basée Sur Le Placement de Pôles Des Procédés Linéaires À RetardHachemi Bhe40% (5)
- Cours de Systemes AsservisDocument82 pagesCours de Systemes Asserviselectroblida86% (7)
- Simulation Des Correcteurs PIDDocument61 pagesSimulation Des Correcteurs PIDHachemi Bhe82% (22)
- CP FpgaDocument56 pagesCP FpgaHachemi Bhe100% (1)
- Compteur À Afficheur Numérique À 3 CaractéresDocument18 pagesCompteur À Afficheur Numérique À 3 CaractéresHachemi BhePas encore d'évaluation
- Régulation PID en PositionDocument8 pagesRégulation PID en PositionHachemi Bhe100% (1)
- Cours KalmanDocument70 pagesCours KalmanHachemi BhePas encore d'évaluation
- Cours ElectrotechniqueDocument156 pagesCours Electrotechniquedjo10Pas encore d'évaluation
- Solutions de Cours PythonDocument30 pagesSolutions de Cours PythonScribdTranslationsPas encore d'évaluation
- Guide ComptaDocument50 pagesGuide ComptajeanphilippePas encore d'évaluation
- Modaris V7R2 de LectraDocument8 pagesModaris V7R2 de Lectrachhiba lahbib100% (1)
- Sage 100 Comptabilite Manuel Pedagogique PDFDocument290 pagesSage 100 Comptabilite Manuel Pedagogique PDFDavila AlomgbaPas encore d'évaluation
- Neware TW06Document1 pageNeware TW06Julio JuarezPas encore d'évaluation
- Tb06exerc1 Enonce CPP TPDocument8 pagesTb06exerc1 Enonce CPP TPnawzatPas encore d'évaluation
- TP hydro-informatiqueDocument30 pagesTP hydro-informatiqueismahen kadriPas encore d'évaluation
- Management Des Systèmes D'information, Architecture Et Urbanisation Des SIDocument41 pagesManagement Des Systèmes D'information, Architecture Et Urbanisation Des SIfrank loic BikongPas encore d'évaluation
- CHAP FCT Amie PDFDocument25 pagesCHAP FCT Amie PDFwissal bentoumiaPas encore d'évaluation
- Suivi Des Investissements1Document8 pagesSuivi Des Investissements1hardykimfumu71Pas encore d'évaluation
- Formation Reseaux Partie 1Document23 pagesFormation Reseaux Partie 1BAMALJoseph FirminPas encore d'évaluation
- Travaux Pratiques - ADCAO PDFDocument7 pagesTravaux Pratiques - ADCAO PDFAlouani KacemPas encore d'évaluation
- TD2 SeDocument2 pagesTD2 SeHamza HamzaPas encore d'évaluation
- Mme Khadija BouzaachaneDocument81 pagesMme Khadija BouzaachaneMohammed TesjalePas encore d'évaluation
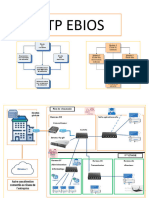
- TP EbiosDocument8 pagesTP EbioszakguitarePas encore d'évaluation
- IntroductionDocument87 pagesIntroductionnajlae alfathiPas encore d'évaluation
- 19ade-Jee TPDocument21 pages19ade-Jee TPfab fabPas encore d'évaluation
- Aide StylageDocument9 pagesAide Stylagesgagne2211Pas encore d'évaluation
- Activer Le Clavier Virtuel Du Système DDocument4 pagesActiver Le Clavier Virtuel Du Système DHellela BelmesPas encore d'évaluation
- IP Product Overview Commercial Brochure FRFR 36028810485459595Document44 pagesIP Product Overview Commercial Brochure FRFR 36028810485459595Cédric LatappyPas encore d'évaluation
- Présentation Du Cours Rédaction Scientifique-1Document55 pagesPrésentation Du Cours Rédaction Scientifique-1freefire06algPas encore d'évaluation
- Introduction Big DataDocument54 pagesIntroduction Big DataAbdelkarim TrabelsiPas encore d'évaluation
- Notice Active Sound GatewayDocument17 pagesNotice Active Sound GatewaylevincePas encore d'évaluation
- Ampl 2021Document20 pagesAmpl 2021pascaltogunaPas encore d'évaluation
- IamracheMassinissa BentoumiNawaleDocument77 pagesIamracheMassinissa BentoumiNawaleMohamed Sghaier Ben MedPas encore d'évaluation
- Cours 3Document16 pagesCours 3andzouanaPas encore d'évaluation
- DHCPDocument6 pagesDHCPMarginel LobilaPas encore d'évaluation
- 22.installation de Windows Server 2012 R2Document1 page22.installation de Windows Server 2012 R2compaore nicolasPas encore d'évaluation
- Curriculum VitaeDocument2 pagesCurriculum VitaeElijah KasandPas encore d'évaluation
- Modèle de PP2 de 5émeDocument13 pagesModèle de PP2 de 5émeBAMALJoseph FirminPas encore d'évaluation