Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Positioning & DrapingDocument27 pagesPositioning & DrapingJennifer Solano Cruel100% (5)
- FORM 137-A SampleDocument5 pagesFORM 137-A SampleSherryl S. Dueño80% (5)
- Level 1 Gnome ArtificerDocument3 pagesLevel 1 Gnome ArtificerLauren PolianPas encore d'évaluation
- Christopher Sommer - Basic Ring Strength DevelopmentDocument1 pageChristopher Sommer - Basic Ring Strength Developmentjvincent6657100% (1)
- (DejaScacchi) Advance Level XIDocument15 pages(DejaScacchi) Advance Level XIRamses ChavezPas encore d'évaluation
- Manual Muscle TestingDocument29 pagesManual Muscle TestingImran Ghafoor67% (6)
- Fluid Mechanics - 2009Document18 pagesFluid Mechanics - 2009Paragmoni KalitaPas encore d'évaluation
- Organizational List Draft 2019Document16 pagesOrganizational List Draft 2019catherine renantePas encore d'évaluation
- Is Cricket A Gender Biased Game India in Relation To The WorldDocument12 pagesIs Cricket A Gender Biased Game India in Relation To The WorldSunnyPas encore d'évaluation
- SS 110 - Lecture Notes Part 3Document5 pagesSS 110 - Lecture Notes Part 3Matthew LimboPas encore d'évaluation
- Anatomi Lower LimbDocument55 pagesAnatomi Lower LimbWagiono SuparanPas encore d'évaluation
- Track and Field EventsDocument33 pagesTrack and Field EventsYu Erin83% (6)
- 2015 - Gonzales-Badillo Effects - of - Velocity - Based - Resistance - TrainingDocument10 pages2015 - Gonzales-Badillo Effects - of - Velocity - Based - Resistance - TrainingJuan Ricardo Sandoval SalcedoPas encore d'évaluation
- Thoracic and Lumbar Spine Anatomy: DR .S.NizamudeenDocument57 pagesThoracic and Lumbar Spine Anatomy: DR .S.NizamudeenPogo LocoPas encore d'évaluation
- PT Ortho Assignment Poliomyelitis: Target Organ: Spinal Cord (Ant - Horn Motor Cells) & Brainstem (BulbarDocument3 pagesPT Ortho Assignment Poliomyelitis: Target Organ: Spinal Cord (Ant - Horn Motor Cells) & Brainstem (BulbarLakshita PrajapatiPas encore d'évaluation
- Exercises Module No. 02Document7 pagesExercises Module No. 02Katrix SungaPas encore d'évaluation
- Nine in The AfternoonDocument8 pagesNine in The Afternoonapi-526605468Pas encore d'évaluation
- Parts Cat Mhi Alog For Centranz Parts and ManufacturingDocument64 pagesParts Cat Mhi Alog For Centranz Parts and ManufacturingSebastián Fernando Canul MendezPas encore d'évaluation
- Static Torque PDFDocument43 pagesStatic Torque PDFlylyho91Pas encore d'évaluation
- Conceptest Clicker Questions: Physics, 4 EditionDocument47 pagesConceptest Clicker Questions: Physics, 4 EditionstephensreenivasulutPas encore d'évaluation
- Power Plyometrics The Complete Program by e PDFDocument3 pagesPower Plyometrics The Complete Program by e PDFjoe0% (1)
- Unit 2 - Fashion CategoriesDocument6 pagesUnit 2 - Fashion CategoriesDeepali B MudalgiPas encore d'évaluation
- Burns - Tissue Perfusion, IneffectiveDocument3 pagesBurns - Tissue Perfusion, Ineffectivemakyofrancis20100% (1)
- JEONJU OPEN International Taekwondo Championships 2019: Invitation LetterDocument8 pagesJEONJU OPEN International Taekwondo Championships 2019: Invitation LetterRock2 JangPas encore d'évaluation
- Doug PolkDocument2 pagesDoug Polkshiva balram0% (1)
- SPT Pipe Blasting MachineDocument1 pageSPT Pipe Blasting MachineChris PerryPas encore d'évaluation
- Appendix B Submission Form For Potential TDS Activities 2021-22Document81 pagesAppendix B Submission Form For Potential TDS Activities 2021-22Sam YAOPas encore d'évaluation
- 5 Second Shake DownDocument3 pages5 Second Shake DownmoseyquePas encore d'évaluation
- 5-Speed Manual Gearbox 0AFDocument139 pages5-Speed Manual Gearbox 0AFSalisburPas encore d'évaluation
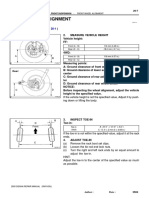
- Wheel AlignmentDocument4 pagesWheel AlignmentdonlynPas encore d'évaluation