Vous aimerez peut-être aussi
- Suport Curs Masini UnelteDocument42 pagesSuport Curs Masini UnelteSzabo Gedeon100% (1)
- MORAR, L., CAMPEAN Emilia, Programarea Echipamentelor CNCDocument359 pagesMORAR, L., CAMPEAN Emilia, Programarea Echipamentelor CNCRudolf-Laszlo Kalmar100% (1)
- MORAR, L., CAMPEAN Emilia, Programarea Echipamentelor CNCDocument359 pagesMORAR, L., CAMPEAN Emilia, Programarea Echipamentelor CNCRudolf-Laszlo Kalmar100% (1)
- Calcul Ambreiaj CCA MathcadDocument31 pagesCalcul Ambreiaj CCA MathcadAndrei PodarPas encore d'évaluation
- Cursuri SMDocument319 pagesCursuri SMAndrei Podar100% (1)
- Fabric Are Counter Mal WDocument1 pageFabric Are Counter Mal WAndrei PodarPas encore d'évaluation
- Sisteme Embedded În Inginerie Electrică Ghid de Aplicații: Ioana-Cornelia GROS Lucian Nicolae PINTILIE Teodor Crișan PANĂDocument153 pagesSisteme Embedded În Inginerie Electrică Ghid de Aplicații: Ioana-Cornelia GROS Lucian Nicolae PINTILIE Teodor Crișan PANĂAndrei PodarPas encore d'évaluation
- Colosm 3Document6 pagesColosm 3Andrei PodarPas encore d'évaluation
- Aspecte Privind Fenomenul de Givraj La Motoarele de Aviatie Cu PistonDocument14 pagesAspecte Privind Fenomenul de Givraj La Motoarele de Aviatie Cu PistonAndrei PodarPas encore d'évaluation
- SD Vide CaptDocument1 pageSD Vide CaptAndrei PodarPas encore d'évaluation
- BX C CounterDocument1 pageBX C CounterAndrei PodarPas encore d'évaluation
- Do Vadas Nep 106384919983Document2 pagesDo Vadas Nep 106384919983Andrei PodarPas encore d'évaluation
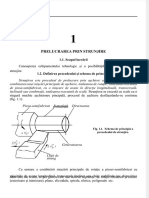
- 1pm L Prelucrarea Prin StrunjireDocument10 pages1pm L Prelucrarea Prin StrunjireAndrei PodarPas encore d'évaluation
- Cam Programare Asistata AvansatDocument36 pagesCam Programare Asistata AvansatAndrei PodarPas encore d'évaluation
- A Doua PaginaDocument1 pageA Doua PaginaAndrei PodarPas encore d'évaluation
- Fisa TehnicaDocument2 pagesFisa TehnicaAndrei PodarPas encore d'évaluation
- Presa Cu Piulita Rotitoare-ProiectDocument19 pagesPresa Cu Piulita Rotitoare-ProiectDoru FechetePas encore d'évaluation
- Precizia AsamblarilorDocument7 pagesPrecizia AsamblarilorBargau AndreiPas encore d'évaluation
- Proiect CCA - Ambreiaj Logan 1.6Document27 pagesProiect CCA - Ambreiaj Logan 1.6Dan PaşcaPas encore d'évaluation
- C C A AmbreajDocument12 pagesC C A AmbreajAndrei PodarPas encore d'évaluation
- Consultatii PDFDocument16 pagesConsultatii PDFAndrei PodarPas encore d'évaluation
- Proiect PCMAIDocument11 pagesProiect PCMAIAndrei PodarPas encore d'évaluation
- Transmisii Cu Suruburi - Calcul Si ProiectareDocument98 pagesTransmisii Cu Suruburi - Calcul Si ProiectareVeronicaNistorPas encore d'évaluation
- Cerere de Reziliere TelekomDocument1 pageCerere de Reziliere TelekomAndrei PodarPas encore d'évaluation
- 10 Caiet+de+practica-UTCNDocument3 pages10 Caiet+de+practica-UTCNRobert BălaşaPas encore d'évaluation
- Bilete CD+MUDocument3 pagesBilete CD+MUAndrei PodarPas encore d'évaluation
- LucrariLab TMDocument103 pagesLucrariLab TMBelu13100% (2)