Académique Documents
Professionnel Documents
Culture Documents
Manual Robot Comau
Transféré par
jorge130494Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Manual Robot Comau
Transféré par
jorge130494Droits d'auteur :
Formats disponibles
Manuales NM
Comau Robotics
Manual de instrucciones
SMART NM in line
SMART NM off set
SMART NM 16 3.1
SMART NM Foundry
SMART NM 45 2.0 Wash
Especificaciones Tcnicas
CR 00757404_es-07/1108
La informacin contenida en este manual es de propiedad de COMAU S.p.A.
Est prohibida su reproduccin, tambin parcial, sin la autorizacin escrita previa de COMAU S.p.A.
COMAU se reserva el derecho de modificar, sin previo aviso, las caractersticas del producto presentado en
este manual.
Copyright 2005 by COMAU - Publicado con fecha 02/2006
Sumario
SUMARIO
PRLOGO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .V
Simbologa adoptada en el manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . V
Documentacin de referencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .VI
1.
PRESCRIPCIONES GENERALES DE SEGURIDAD . . . . . . . . . . . . . . . . . . . . . . . . ..1.1
Responsabilidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.1
Prescripciones de seguridad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.2
Finalidad. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.2
Definiciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.2
Aplicabilidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.3
Modos operativos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.4
2.
DESCRIPCIN GENERAL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ..2.1
Robot SMART NM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.1
Mecnica del robot. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.5
Intercambiabilidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.7
Calibrado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.7
3.
CARACTERSTICAS TCNICAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ..3.1
Generalidades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.1
4.
REAS OPERATIVAS Y DIMENSIONES MXIMAS DEL ROBOT. . . . . . . . . . . . . ..4.1
SMART NM 25-2.2 In line SMART NM 25-2.2 Foundry - rea operativa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
SMART NM 25-2.2 In line SMART NM 25-2.2 Foundry - rea operativa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
SMART NM 45-2.0 In line SMART NM 45-2.0 Foundry rea operativa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
SMART NM 45-2.0 In line SMART NM 45-2.0 Foundry rea operativa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
SMART NM 25-2.2 off-set SMART NM 25-2.2 Foundry - rea operativa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
SMART NM 25-2.2 off-set SMART NM 25-2.2 Foundry - rea operativa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
SMART NM 45-2.0 off-set SMART NM 45-2.0 Foundry - rea operativa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
lb-rc-nh1-sptTOC.fm
Sumario
SMART NM 45-2.0 off-set SMART NM 45-2.0 Foundry - rea operativa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
SMART NM 16 3.1 rea Operativa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
SMART NM 16 3.1 rea Operativa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
SMART NM 25-2.2 In line SMART NM 25-2.2 Foundry - Limitacin rea operativa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
SMART NM 45-2.0 In line SMART NM 45-2.0Foundry - Limitacin rea operativa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
SMART NM 25-2.2 off-set SMART NM 25-2.2Foundry - Limitacin rea operativa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
SMART NM 45-2.0 off-set SMART NM 45-2.0 Foundry -Limitacin rea operativa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
SMART NM 16-3.1 Limitacin rea operativa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
5.
BRIDA ROBOT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5.1
Brida portaherramientas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.1
6.
CARGAS AL PULSO Y ADICIONALES. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6.1
Generalidades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6.1
Determinacin cargas mx. en la brida del pulso (QF) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6.2
Cargas adicionales (QS) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6.9
7.
PREDISPOSICIONES PARA LA INSTALACIN DEL ROBOT . . . . . . . . . . . . . . . . .7.1
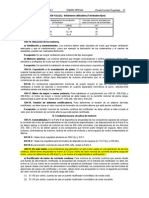
Condiciones ambientales. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.1
Datos ambientales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.1
Espacio operativo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.1
Fijacin a una placa en acero . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.1
Fijacin de placa nivelable (opcional) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.1
Esfuerzos transmitidos a la estructura de soporte. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.3
Instalacin del robot sobre un plano inclinado. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.4
8.
OPCIONES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8.1
Descripcin general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8.1
Grupo final de carrera mecnico regulable eje 1 (cdigo 82212100) . . . . . . . . . . . . . . . . . . . . 8.2
Descripcin. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8.2
Grupo final de carrera mecnico regulable eje 2 (cdigo 82212200) . . . . . . . . . . . . . . . . . . . . 8.4
Descripcin. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8.4
Grupo final de carrera mecnico regulable eje 3 (cdigo 82212300) . . . . . . . . . . . . . . . . . . . . 8.6
Descripcin. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8.6
II
lb-rc-nh1-sptTOC.fm
Sumario
Grupo parcializacin del rea de trabajo eje 1 (cdigo CR82213400) . . . . . . . . . . . . . . . . . . . 8.8
Descripcin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8.8
Grupo placa nivelable (cdigo 82212700) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8.11
Descripcin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8.11
Kit para calibracin manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8.13
Descripcin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8.13
Grupo til calibrado (cdigo 81783801 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8.16
SMART NM). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8.16
SMART NM off set . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8.17
SMART NM 16-3.1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8.18
Descripcin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8.18
Grupo plataforma elevadora de horquillas (cdigo 82212600) . . . . . . . . . . . . . . . . . . . . . . . . 8.19
Descripcin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8.19
Grupo proteccin de las conexiones de clasificacin (marchable cdigo 82284200) . . . . . . . 8.20
Descripcin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8.20
Unidad tornillos y clavijas para la fijacin del robot (cdigo 82211900) . . . . . . . . . . . . . . . . . 8.20
Descripcin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8.20
lb-rc-nh1-sptTOC.fm
III
Sumario
IV
lb-rc-nh1-sptTOC.fm
Prlogo
PRLOGO
Simbologa adoptada en el manual
Seguidamente se indican los smbolos que representan: ADVERTENCIAS,
ATENCIN y NOTAS y su respectivo significado
El smbolo indica procedimientos de funcionamiento, informaciones tcnicas y
precauciones que si no son respetadas y/o realizadas correctamente pueden
causar lesiones al personal.
El smbolo indica procedimientos de funcionamiento, informaciones tcnicas y
precauciones que si no son respetadas y/o realizadas correctamente pueden
causar daos a los equipos.
El smbolo indica procedimientos de funcionamiento, informaciones tcnicas y
precauciones que es esencial poner en evidencia.
mc-rc-NM_16-pref_01.fm
01/0708
Prlogo
Documentacin de referencia
El presente documento se refiere a los robots en equipamiento estndar:
SMART NM in line
SMART NM off set
SMART NM foundry
SMART NM wash
SMART NM 16 3.1
El set completo de los manuales que documentan el sistema robot y control est
compuesto por:
Comau
Robot:
SMART NM in line;
SMART NM off set
SMART NM foundry
SMART NM wash
SMART NM 16 3.1
Especificaciones Tcnicas
Transporte e instalacin
Mantenimiento
Esquema elctrico
Estos manuales deben integrarse con los siguientes documentos:
Comau
Unidad de Control
C4G
Programacin
VI
Especificaciones Tcnicas
Transporte e instalacin
Gua para la integracin, seguridades,
I/O, comunicaciones
Mantenimiento
Uso de la Unidad de Control
Esquema elctrico
EZ PDL2 Ambiente de programacin
facilitado
PDL2 Programming Language Manual
VP2 Visual PDL2
Programacin del movimiento
mc-rc-NM_16-pref_01.fm
01/0708
Prescripciones Generales de Seguridad
1.
PRESCRIPCIONES GENERALES
DE SEGURIDAD
1.1 Responsabilidad
El integrador debe realizar la instalacin y el desplazamiento del Sistema Robot y
Control de conformidad con las normas de Seguridad vigentes en el Pas donde
se realiza la instalacin. La aplicacin y el empleo de los dispositivos de proteccin
y seguridad necesarios, la emisin de la declaracin de conformidad y la eventual
marcacin CE del sistema, estn a cargo del Integrador.
COMAU Robotics & Service declina cualquier responsabilidad por incidentes
causados por el uso incorrecto o impropio del Sistema Robot y Control por
manumisiones de circuitos, de componentes, del software y del empleo de
repuestos que no se encuentren en la lista de las piezas de repuesto.
La responsabilidad de la aplicacin de las presentes prescripciones de seguridad
est a cargo de los encargados que dirigen / vigilan las actividades mencionadas
en el prrafo Aplicabilidad, los cuales deben asegurarse de que el Personal
encargado conozca y observe escrupulosamente las prescripciones contenidas en
este documento, adems de las normas de seguridad vigentes en el pas en el que
se realiza la instalacin.
La no observacin de las Normas de Seguridad puede causar lesiones al personal
y daar el Sistema Robot y Control.
La instalacin debe ser efectuada por Personal cualificado y debe ser conforme
a todas las codificaciones nacionales y locales.
ge-0-0-0_01.fm
07/1007
1-1
Prescripciones Generales de Seguridad
1.2 Prescripciones de seguridad
1.2.1
Finalidad
Estas prescripciones de seguridad tienen la finalidad de definir una serie de
comportamientos y obligaciones a los cuales hay que atenerse al efectuar las
actividades enunciadas en el prrafo Aplicabilidad.
1.2.2
Definiciones
Sistema Robot y Control
Se define Sistema Robot y Control al conjunto funcional formado por: Unidad de
Control, robot, Terminal de programacin y eventuales opciones.
Espacio protegido
Se define espacio protegido a la zona delimitada por las barreras de proteccin y
destinada a la instalacin y funcionamiento del robot
Personal autorizado
Se define personal autorizado al conjunto de personas oportunamente instruidas y que
deben realizar las actividades mencionadas en el prrafo Aplicabilidad.
Personal encargado
Se define encargado al personal que dirige o controla las actividades que realizan los
trabajadores subordinados definidos en el punto precedente
Instalacin y Puesta en funcionamiento
Se define instalacin a la integracin mecnica, elctrica, software del Sistema Robot
y Control en cualquier ambiente que requiera la manipulacin controlada de los ejes del
Robot, en conformidad con los requisitos de seguridad previstos en la Nacin donde se
instala el Sistema.
Funcionamiento en programacin
Modo operativo bajo control del operador, que excluye el funcionamiento automtico y
que permite las siguientes actividades: movimiento manual de los ejes del robot y
programacin de ciclos de trabajo a velocidad reducida, ensayo del ciclo programado a
velocidad reducida y, cuando est admitido, a velocidad de trabajo.
Funcionamiento en Auto / Remote
Modo operativo en que el robot ejecuta autnomamente el ciclo programado a la
velocidad de trabajo, con personal en el exterior del espacio protegido, con las barreras
de proteccin cerradas e introducidas en el circuito de seguridad, con puesta en
marcha/paro local (situado en el exterior del espacio protegido) o remoto.
Mantenimiento y reparacin
Se define intervencin de mantenimiento y reparacin a las actividades de
comprobacin peridica y/o de sustitucin de piezas (mecnicas, elctricas, software)
o de componentes del Sistema Robot y Control y a las actividades para identificar la
causa de una falla ocurrida, que se concluye con el restablecimiento del Sistema Robot
y Control en las condiciones funcionales de proyecto.
1-2
ge-0-0-0_01.fm
07/1007
Prescripciones Generales de Seguridad
Puesta fuera de servicio y Desmantelamiento
Se define puesta fuera de servicio a la actividad de extraccin mecnica y elctrica del
Sistema Robot y Control de una realidad productiva o de un ambiente de estudio.
El desmantelamiento consiste en la actividad de demolicin y eliminacin de los
componentes que constituyen el Sistema Robot y Control.
Integrador
Se define Integrador a la figura profesional responsable de la instalacin y puesta en
servicio del Sistema Robot y Control.
Uso incorrecto
Se define uso incorrecto al empleo del sistema que no respeta los lmites especificados
en la Documentacin tcnica.
Campo de accin
Por campo de accin del Robot se entiende el volumen de envoltura de la zona ocupada
por el Robot y por sus dispositivos durante el movimiento en el espacio.
1.2.3
Aplicabilidad
Las presentes Prescripciones deben ser aplicadas durante la ejecucin de las
siguientes actividades:
ge-0-0-0_01.fm
07/1007
Instalacin y puesta en servicio;
Funcionamiento en Programacin;
Funcionamiento en Auto / Remote;
Desfrenado de los ejes robot;
Espacios de parada (casos lmites)
Mantenimiento y reparacin;
Puesta fuera de servicio y Desmantelamiento
1-3
Prescripciones Generales de Seguridad
1.2.4
Modos operativos
Instalacin y puesta en servicio
1-4
La puesta en servicio est permitida slo cuando el Sistema Robot y Control est
instalado correctamente y de manera completa.
La instalacin y puesta en servicio del sistema est permitida nicamente al
personal autorizado.
La instalacin y la puesta en servicio del sistema est permitida exclusivamente
en el interior de un espacio protegido, con dimensiones adecuadas para alojar el
robot y el dispositivo con el cual est equipado, sin salir de las barreras. Es
necesario verificar adems que en las condiciones de movimiento normal del
robot, se evite su choque con partes internas del espacio protegido (por ej.
columnas de la estructura, lneas de alimentacin, etc.) o con las barreras. De ser
necesario, delimitar la zona de trabajo del robot por medio de topes mecnicos de
fin de carrera (vanse las unidades opcionales).
Los eventuales puestos fijos de mando del robot deben estar colocados afuera del
espacio protegido y en un punto tal que permita observar completamente los
movimientos del robot.
En la medida de lo posible, la zona de instalacin del robot debe estar libre de
materiales que puedan impedir o limitar la visual.
Durante las fases de instalacin, el robot y la Unidad de Control deben ser
manipulados como se indica en la Documentacin tcnica del producto; en caso
de elevacin, comprobar la fijacin correcta de los bulones de suspensin y utilizar
nicamente eslingas y dispositivos adecuados.
Fijar el robot al soporte de sujecin con todos los bulones y los pasadores
previstos, apretados con los pares de torsin indicados en la Documentacin
tcnica del producto.
De estar presentes, extraer los estribos de fijacin de los ejes y comprobar la
correcta fijacin del dispositivo con el cual est equipado el robot.
Verificar que los resguardos del robot estn fijados correctamente y que no hayan
piezas mviles o flojas; controlar adems la integridad de los componentes de la
Unidad de Control.
Instalar la Unidad de Control en el exterior del espacio protegido: la Unidad de
Control no debe ser utilizada como parte de los vallados.
Verificar la coherencia entre la tensin predispuesta en la Unidad de Control
indicada en la placa y el valor de tensin de la red de distribucin de energa.
Antes de conectar elctricamente la Unidad de Control, verificar que el disyuntor
en la red de distribucin est bloqueado en posicin de apertura.
La conexin entre la Unidad de Control y el disyuntor de red debe realizarse
mediante un cable blindado cuadripolar (3 fases + tierra) de dimensiones
adecuadas a la potencia instalada en la Unidad de Control; vase la
Documentacin tcnica del producto.
El cable de alimentacin debe entrar en la Unidad de Control a travs del
apropiado aislador pasapanel y estar bloqueado correctamente.
Conectar el conductor de tierra (PE) y luego conectar los conductores de potencia
al interruptor general.
ge-0-0-0_01.fm
07/1007
Prescripciones Generales de Seguridad
Conectar el cable de alimentacin, conectando primero el conductor de tierra al
disyuntor en la red de distribucin de energa luego de haber comprobado
mediante el instrumento apropiado que los bornes del disyuntor estn sin tensin.
Se recomienda conectar la armadura del cable a tierra.
Conectar los cables de seales y potencia entre la Unidad de Control y el robot.
Conectar el robot a tierra o a la Unidad de Control o a una toma de tierra cercana.
Comprobar que la/las puerta/s de la Unidad de Control estn cerradas con la llave
correspondiente.
La conexin incorrecta de los conectores puede provocar daos permanentes a
los componentes de la Unidad de Control.
La Unidad de Control C4G administra en su interior los principales interbloqueos
de seguridad (barreras de proteccin, botn de habilitacin, etc.). Conectar los
interbloqueos de seguridad de la Unidad de Control C4G con los circuitos de
seguridad de la lnea teniendo cuidado de realizarlos como lo requieren las
Normas de Seguridad. La seguridad de las seales de interbloqueo provenientes
de la lnea de transferencia (paro de emergencia, seguridad barreras de
proteccin, etc.), es decir la realizacin de circuitos correctos y seguros est a
cargo del integrador del Sistema Robot y Control.
En el circuito de paro de emergencia de la celda/lnea es necesario incluir los
contactos de los botones de paro de emergencia de la unidad de control,
disponibles en X30. Los botones no estn interbloqueados internamente al
circuito de paro de emergencia de la unidad de Control.
En el caso de una realizacin incorrecta, incompleta o que no posea dichos
interbloqueos, no se garantiza la seguridad del sistema.
En el circuito de seguridad est previsto el paro controlado (IEC 60204-1 , paro de
categora 1) para las entradas de seguridad Auto Stop/ General Stop y
Emergencia. El paro controlado est activo slo en estado Automtico; en
Programacin, la exclusin de la potencia (apertura de los contactores de
potencia) se realiza de manera inmediata. La modalidad para la seleccin del
tiempo de paro controlado (se programa en la tarjeta ESK) se describe en el
Manual de Instalacin.
En la realizacin de las barreras de proteccin, especialmente para las barreras
pticas y las puertas de entrada, hay que tener presente que los tiempos y los
espacios de paro del robot estn en funcin de la categora de paro (0 1) y de la
masa del robot.
Verificar que el tiempo de parocontrolado sea coherente con el tipo de Robot
conectado a la Unidad de Control. El tiempo de paro se selecciona a travs de los
selectores SW1 y SW2 en la tarjeta ESK.
ge-0-0-0_01.fm
07/1007
Comprobar que las condiciones ambientales y operativas de trabajo no excedan
los lmites especificados en la Documentacin Tcnica del producto especfico.
Las operaciones de calibracin deben efectuarse con la mxima atencin, como
indicado en la Documentacin Tcnica del producto especfico, y se deben
concluir con la verificacin de la posicin correcta de la mquina.
Para las fases de carga o actualizacin del software de sistema (por ejemplo luego
de la sustitucin de tarjetas), utilizar nicamente el software original entregado por
COMAU Robotics & Service. Atenerse escrupulosamente al procedimiento de
carga del software de sistema descrito en la Documentacin Tcnica suministrada
1-5
Prescripciones Generales de Seguridad
con el producto especfico. Luego de la carga, efectuar siempre algunos ensayos
de manipulacin del Robot, a velocidad reducida permaneciendo afuera del
espacio protegido.
Verificar que las barreras del espacio protegido estn colocadas correctamente.
Funcionamiento en Programacin
1-6
La programacin del robot est permitida nicamente al personal autorizado.
Antes de efectuar la programacin, el operador debe controlar el Sistema Robot y
Control para asegurarse de que no subsistan condiciones anmalas
potencialmente peligrosas y que no hayan personas en el espacio protegido.
En la medida de lo posible, la programacin debe ser comandada quedndose en
el exterior del espacio protegido.
Antes de trabajar en el interior del Espacio protegido, el operador debe
asegurarse, quedndose en el exterior del espacio protegido, que todas las
protecciones necesarias y los dispositivos de seguridad estn presentes y
funcionantes, y especialmente que el Terminal de Programacin funcione
correctamente (velocidad reducida, enabling device, dispositivo de paro de
emergencia, etc.).
Durante las fases de programacin, la presencia en el interior del Espacio
protegido est permitida solamente al operador que posee el Terminal de
Programacin.
Si es indispensable la presencia de un segundo operador en la zona de trabajo
durante el control del programa, l deber disponer de su enabling device
(dispositivo de habilitacin) interbloqueado con los dispositivos de seguridad.
La activacin de los motores (Drive On) debe estar comandada siempre desde una
posicin externa al campo de accin del robot, luego de haber verificado que en la
zona interesada no hayan personas. La operacin de activacin de los motores se
considera concluida cuando aparece la relativa indicacin de estado mquina.
Durante la programacin, el operador debe mantenerse a una distancia del robot
tal que le permita evitar eventuales movimientos anmalos de la mquina, e
igualmente en una posicin que evite posibles riesgos de forzamiento entre el
robot y partes de la estructura (columnas, barrera, etc.), o entre partes mviles del
robot mismo.
Durante la programacin, el operador debe evitar encontrarse en correspondencia
de partes del robot que pueden, por el efecto de la gravedad, cumplir movimientos
hacia abajo o hacia arriba o lateralmente (en el caso de montaje sobre un plano
inclinado).
El ensayo del ciclo programado a la velocidad de trabajo, en algunas situaciones
en que se haga necesario efectuar un control visivo a breve distancia, con la
presencia del operador en el interior del espacio protegido, debe activarse slo
luego de haber efectuado un ciclo completo de ensayo a velocidad reducida. El
ensayo debe ser comandado desde una distancia de seguridad.
Hay que prestar particular atencin cuando se programa mediante Terminal de
Programacin: en tal caso, aunque todos los dispositivos de seguridad hardware
y software estn en funcionamiento, el movimiento del robot depende igualmente
del operador.
La primera ejecucin de un nuevo programa puede implicar el movimiento del
robot a lo largo de una trayectoria diversa de aquella esperada.
ge-0-0-0_01.fm
07/1007
Prescripciones Generales de Seguridad
La modificacin de pasos del programa (por ej. desplazamiento de un paso de un
punto a otro del flujo, registro equivocado de un paso, modificacin de la posicin
del robot afuera de la trayectoria que empalma dos pasos del programa), puede
dar origen a movimientos no previstos por el operador en la fase de ensayo del
programa mismo.
En ambos casos, trabajar con atencin, mantenindose igualmente por afuera del
campo de accin del robot y ensayar el ciclo a velocidad reducida.
Funcionamiento en Auto / Remote
La activacin del funcionamiento en automtico (estados AUTO y REMOTE) est
permitida nicamente con el Sistema Robot y Control integrado en un rea dotada
de barreras de proteccin correctamente interbloqueadas, como prescrito por las
Normas de Seguridad vigentes en el Pas donde se realiza la instalacin.
Antes de activar el funcionamiento en automtico, el operador debe verificar el
Sistema Robot y Control y el espacio protegido para asegurarse de que no
subsistan condiciones anmalas potencialmente peligrosas.
El operador puede activar el funcionamiento automtico slo luego de haber
comprobado:
que el Sistema Robot y Control no est en estado de mantenimiento o
reparacin;
que las barreras de proteccin estn colocadas correctamente;
que no haya personal en el interior del espacio protegido;
que las puertas de la unidad de Control estn cerradas con la llave
correspondiente;
que los dispositivos de seguridad (paro de emergencia, seguridades de las
barreras de proteccin) funcionen correctamente;
Hay que prestar una particular atencin a la seleccin del estado remote, en el que
el PLC de la lnea puede cumplir operaciones automticas de encendido de los
motores e inicio del programa.
Desfrenado de los ejes robot
En ausencia de la fuerza motriz, el desplazamiento de los ejes del robot es factible
por medio de dispositivos opcionales para desfrenado y de adecuados medios de
elevacin. Dichos dispositivos permiten nicamente la desactivacin del freno de
cada eje. En este caso, todas las seguridades del sistema (incluido el paro de
emergencia y el botn de habilitacin) estn excluidas; adems, los ejes robot
pueden moverse hacia arriba o hacia abajo gracias a las fuerzas generadas por el
sistema de equilibrado o por la gravedad.
Antes de utilizar los dispositivos para el desfrenado manual, se recomienda
eslingar el robot o engancharlo a un puente-gra.
Espacios de parada (casos lmites)
ge-0-0-0_01.fm
07/1007
Para cada tipo de Robot se pueden pedir a COMAU Robotics & Service los
espacios de parada lmite.
Ejemplo: Considerando el robot en modalidad automtica, en las condiciones de
mxima extensin, mxima carga y mxima velocidad, luego de la presin del
botn de stop (seta roja en WiTP) se obtiene el paro completo de un Robot NJ
370-2.7 en aproximadamente 85 de movimiento correspondientes a
aproximadamente 3000 mm de desplazamiento, medidos sobre la brida TCP. En
1-7
Prescripciones Generales de Seguridad
las condiciones indicadas, el tiempo de paro del Robot NJ 370-2.7 es de 1,5
segundos.
Considerando el robot en modalidad programacin (T1), luego de la presin del
botn de stop (seta roja en WiTP) se obtiene el paro completo de un Robot NJ
370-2.7 en aproximadamente 0,5 segundos.
Mantenimiento y Reparacin
En el montaje en COMAU Robotics & Service, el robot es abastecido con
lubricantes que no contienen sustancias peligrosas para la salud; sin embargo, en
algunos casos, la exposicin reiterada y prolongada al producto puede provocar
manifestaciones cutneas irritantes o malestar en el caso de ingestin.
Medidas de Primeros Auxilios. En caso de contacto con los ojos o con la piel:
lavar con abundante agua las zonas contaminadas; si la irritacin persiste,
consultar con un mdico.
En caso de ingestin no provocar el vmito ni suministrar productos por va oral;
consultar un mdico lo antes posible.
Las operaciones de mantenimiento, la bsqueda de fallas y la reparacin estn
permitidas nicamente al personal autorizado.
Las actividades de mantenimiento y reparacin en curso deben estar advertidas
con un apropiado cartel que indique el estado de mantenimiento, situado en la
consola de mandos de la unidad de Control, hasta que se termine la operacin
aunque est temporneamente suspendida.
Las operaciones de mantenimiento y sustitucin de componentes o de la unidad
de Control, deben ser efectuadas con el interruptor general en posicin abierta y
bloqueado con un candado de seguridad.
Aunque la Unidad de Control no est alimentada (interruptor general abierto),
pueden haber presentes tensiones interconectadas, provenientes de la conexin
con unidades perifricas o con fuentes de alimentaciones externas (por ej.
input/output a 24 Vcc). Desactivar las fuentes externas cuando se trabaja sobre las
partes interesadas del sistema.
La extraccin de paneles, pantallas protectivas, rejas, etc. est permitida slo con
el interruptor general abierto y bloqueado con candado de seguridad.
Los componentes fallados deben ser sustituidos con otros del mismo cdigo o
equivalentes, definidos por COMAU Robotics & Service.
Despus de la sustitucin del mdulo ESK, en el nuevo mdulo verificar que la
programacin del tiempo de paro sobre los selectores SW1 y SW2 sea coherente
con el tipo de Robot conectado a la Unidad de Control.
1-8
Las actividades de bsqueda de fallas y de mantenimiento deben ser efectuadas,
en la medida de lo posible, en el exterior del espacio protegido.
Las actividades de bsqueda de fallas efectuadas en el control deben, en la
medida de lo posible, ser efectuadas sin alimentacin.
Si durante las actividades de bsqueda de fallas fuese necesario efectuar
intervenciones con la Unidad de Control alimentada, debern tomarse todas las
precauciones requeridas por las Normas de Seguridad cuando se trabaja ante la
presencia de tensiones peligrosas.
La actividad de bsqueda de fallas en el robot debe efectuarse con la alimentacin
de potencia desactivada (Drive off).
ge-0-0-0_01.fm
07/1007
Prescripciones Generales de Seguridad
ge-0-0-0_01.fm
07/1007
Al final de la intervencin de mantenimiento y bsqueda de fallas, deben
restablecerse las seguridades desactivadas (paneles, pantallas protectivas,
interbloqueos, etc.).
La intervencin de mantenimiento, reparacin y bsqueda de fallas debe
concluirse con la comprobacin del correcto funcionamiento del Sistema Robot y
Control y de todos los dispositivos de seguridad, efectuada quedndose afuera del
espacio protegido.
Durante las fases de carga del software (por ejemplo tras la sustitucin de tarjetas
electrnicas) es necesario utilizar el software original entregado por COMAU
Robotics & Service. Atenerse escrupulosamente al procedimiento de carga del
software de sistema descrito en la Documentacin Tcnica del producto
especfico; luego de la carga, efectuar siempre un ciclo de ensayo por seguridad,
quedndose afuera del espacio protegido.
El desmontaje de componentes del robot (por ej. motores, cilindros para
equilibrado, etc.) puede provocar movimientos incontrolados de los ejes en
cualquier direccin: antes de iniciar un desmontaje es entonces necesario referirse
a las tarjetas de advertencias aplicadas en el robot y a la Documentacin Tcnica
suministrada.
Est terminantemente prohibido extraer la cobertura de proteccin de los muelles
del robot.
1-9
Prescripciones Generales de Seguridad
Puesta fuera de servicio y Desmantelamiento
1-10
La puesta fuera de servicio y la extraccin del Sistema Robot y Control est
permitida nicamente al Personal autorizado.
Poner el robot en posicin de transporte y montar los estribos de bloqueo de los
ejes (cuando previsto) refirindose a la tarjeta aplicada en el robot y a su
Documentacin Tcnica.
Antes de efectuar la puesta fuera de servicio, es obligatorio desconectar la tensin
de red en la entrada de la unidad de Control (desconectar el disyuntor en la red de
distribucin de energa y bloquearlo en posicin abierta).
Luego de haber comprobado con el instrumento correspondiente que los bornes
estn sin tensin, desconectar el cable de alimentacin del disyuntor en la red de
distribucin de energa, quitando primero los conductores de potencia y luego el
de tierra. Desconectar el cable de alimentacin de la Unidad de Control y extraerlo.
Desconectar primero los cables de conexin entre el robot y la Unidad de Control
y luego el conductor de tierra.
De estar presente, desconectar el sistema neumtico del robot de la red de
distribucin del aire.
Comprobar que el robot est correctamente equilibrado y, de ser necesario,
eslingarlo correctamente; entonces desmontar los bulones de fijacin del robot del
soporte de sujecin.
Extraer el robot y la Unidad de Control de la zona de trabajo, adoptando todas las
prescripciones indicadas en la Documentacin Tcnica de los productos; si se
hace necesario elevarlo, comprobar la correcta fijacin de los bulones de
suspensin y utilizar nicamente eslingas y dispositivos adecuados.
Antes de efectuar operaciones de desmantelamiento (desmontaje, demolicin y
eliminacin) de los componentes que constituyen el Sistema Robot y Control,
consultar con COMAU Robotics & Service, o con una de sus filiales, que indicar,
en funcin del tipo de robot y de Unidad de Control, las modalidades operativas en
el respeto de los principios de seguridad y de salvaguardia ambiental.
La eliminacin de desechos debe realizarse satisfaciendo la legislacin de la
Nacin en la que est instalado el Sistema Robot y Control.
ge-0-0-0_01.fm
07/1007
Descripcin General
2.
DESCRIPCIN GENERAL
2.1 Robot SMART NM
SMART NM es la familia de robot COMAU de mediana capacidad de carga, compuesta
por mquinas dedicadas a aplicaciones en las cuales se requiere la posibilidad de
programar "punto a punto" o en "control de trayectoria".
Las aplicaciones ms comunes son:
manipulacin
soldadura
ensamblaje
aplicacin de adhesivos, selladores, protectores
elaboraciones para la eliminacin de virutas (por ej.: desbarbado, amolado)
Las versiones disponibles en el interior de la familia de robot SMART NM se enumeran
a continuacin:
Tab. 2.1 - Versiones disponibles del robot SMART NM
Versin
Payload (kg)
Reach (mm)
25-22
25
2200
45-2.0
45
2000
SMART NM 25-2.2 Off-set
SMART NM 25-2.2 Foundry
25-22
25
2200
SMART NM 45-2.0 Off-set
SMART NM 45-2.0 Foundry
45-2.0
45
2000
SMART NM 16 3.1
16-3.1
16
3100
Modelo
SMART NM 25-2.2 In -line
SMART NM 25-2.2 Foundry
SMART NM 45-2.0 In -line
SMART NM 45-2.0 Foundry
SMART NM 45-2.0 Wash
Las versiones Foundry son aptas para aplicaciones en ambientes de elevada
temperatura; en efecto, garantizan un grado de proteccin IP67 en el pulso y los
motores.
Las versiones Wash son aptas para aplicaciones en sistemas de lavado donde se
utilizan sustancias agresivas. Adems del grado de proteccin IP67 garantizado en el
pulso y los motores, los robots cuentan con particulares mejoramientos tcnicos que
garantizan su aislamiento contra eventuales acciones corrosivas causadas por el
ambiente de trabajo.
mc-rb-NM_16-spt_01.FM
03/0608
2-1
Descripcin General
2-2
Fig. 2.1
- SMART NM 25-2.2 In -line
SMART NM 25-2.2 Foundry
Fig. 2.2
- SMART NM 45-2.0 In -line
SMART NM 45-2.0 Foundry
mc-rb-NM_16-spt_01.FM
03/0608
Descripcin General
mc-rb-NM_16-spt_01.FM
03/0608
Fig. 2.3
- SMART NM 45-2.0 Wash
Fig. 2.4
- SMART NM 25-2.2 Off-set
SMART NM 25-2.2 Foundry
2-3
Descripcin General
2-4
Fig. 2.5
- SMART NM 45-2.0 Off-set
SMART NM 45-2.0 Foundry
Fig. 2.6
- SMART NM 16 3.1
mc-rb-NM_16-spt_01.FM
03/0608
Descripcin General
Las cargas declaradas (al pulso y adicionales) aplicadas sobre el robot pueden ser
movidas al mximo de las prestaciones en el interior de todo el volumen de trabajo,
gracias a un software especfico que, permitiendo alcanzar las mximas velocidades en
las aplicaciones en las cuales las carreras del robot sean lo suficientemente amplias,
maximiza las aceleraciones en funcin de la carga declarada y del ciclo.
El diseo ha sido optimizado gracias a la ayuda de CAD tridimensional y las estructuras
deben sus dimensiones a anlisis de elementos finitos (FEA); ello ha conducido a
elevados resultados en trminos de prestaciones y fiabilidad.
El cuidado por los detalles ha permitido facilitar el uso cotidiano de la mquina,
reduciendo la cantidad de las piezas y favoreciendo la accesibilidad de aquellas sobre
las cuales eventualmente ser necesario intervenir.
Las intervenciones de mantenimiento son mnimas, intuitivas y no requieren de equipos
especiales.
La Intercambiabilidad entre los robot de la misma versin est garantizada: un robot
puede ser sustituido rpidamente sin requerir importantes intervenciones para corregir
el programa.
Cada robot est equipado con un Sistema de Control que satisface las normativas de
seguridad de la Comunidad europea y los estndares ms importantes.
Los cables de conexin entre el control y el robot cuentan con conectores del tipo
"plug-in".
La predisposicin para una serie de opciones, permite utilizar los robot en condiciones
de seguridad, respetando las ms severas normativas europeas e internacionales.
2.2 Mecnica del robot
El robot es del tipo antropomorfo con 6 grados de libertad.
La base fija est anclada al piso con 4 tornillos M16x60 y referida de manera exacta
respecto a la placa de fijacin, mediante dos clavijas especiales 30 mm.
Una columna que lleva el motorreductor del eje 2, gira alrededor del eje de rotacin
vertical (eje 1) sobre la base fija.
Un brazo conecta el eje 2 al antebrazo. El antebrazo incluye los motorreductores de los
ejes 3-4 y adems soporta los motores de los ejes 4-5-6.
En el extremo del antebrazo se encuentra el pulso que se interconecta con el rbol de
salida del movimiento del eje 5 y soporta el grupo reduccin eje 6.
En la versin NM 16 3.1, el antebrazo est alargado mediante un distanciador y en su
extremo delantero est fijado el pulso para la manipulacin de los ejes 5-6.
Los ejes de los robot cuentan con finales de carrera software (programables) y/o
mecnicos amortiguados en suministro estndar u opcional; en los ejes principales
(ejes 1-2-3), en funcin de las necesidades aplicativas, se puede limitar la carrera del
eje mediante finales de carrera mecnicos adicionales amortiguados.
Para el eje 1 hay disponible una opcin especfica que permite personalizar el rea de
trabajo en funcin de la aplicacin requerida, permitiendo una parcializacin de la
carrera del eje 1.
Tab. 2.2 - Disponibilidad final de carrera ejes
mc-rb-NM_16-spt_01.FM
03/0608
2-5
Descripcin General
Estndar
Modelo Robot
Opcionales
Final de carrera
software
Final de carrera
mecnico
Final de carrera
mecnico
regulable
Axes 1-2-3-4-5-6
Axes 1-2-3-4-5
Axe 1
SMART NM
SMART NM Off Set
SMART NM 16 3.1
Los reductores son del tipo con huelgo nulo, especficos para aplicaciones robticas.
Para garantizar la mejor eficiencia, la lubricacin de todos los reductores es con aceite,
con exclusin del reductor del eje 6 en la versin SMART NM 16 3.1; la sustitucin del
lubricante est prevista slo cada 15.000 h, equivalentes a aproximadamente 3 aos de
funcionamiento en tres turnos de trabajo.
Los motores son del tipo AC brushless y en su interior llevan integrados el freno y el
encoder.
2-6
mc-rb-NM_16-spt_01.FM
03/0608
Descripcin General
2.3 Intercambiabilidad
La intercambiabilidad entre robot de la misma versin es la caracterstica fundamental
para permitir una rpida sustitucin o para transferir el mismo programa a otra estacin
robotizada.
Esta caracterstica se garantiza mediante:
tolerancias de fabricacin adecuadas de todas las piezas que forman la estructura
referencia precisa del robot respecto a la placa de fijacin mediante dos clavijas
(entregadas con el robot)
posibilidad de llevar los ejes a una posicin conocida (Calibrado) mediante el
empleo de equipos especficos (nico para todos los ejes y para todos los
modelos).
Estos detalles permiten transferir los programas entre robots de la misma versin.
Las caractersticas mencionadas son indispensables para una eficaz "programacin
fuera de lnea" efectuada en un ambiente virtual.
2.4 Calibrado
El calibrado es la operacin que permite llevar los ejes del robot a una posicin
conocida para garantizar la correcta repeticin de los ciclos programados y la
intercambiabilidad entre mquinas de la misma versin.
Hay previstas dos modalidades de calibrado:
mc-rb-NM_16-spt_01.FM
03/0608
calibrado preciso: se realiza mediante el uso de un equipo especfico que es nico
para todos los ejes y para todos los modelos; debe efectuarse tras una
intervencin de mantenimiento extraordinario que implique la descomposicin de
la cadena cinemtica entre el motor y el eje del robot o en los casos en que se
ejecuten ciclos particularmente exigentes en trminos de precisin.
calibrado en muescas de referencia: permite un calibrado rpido pero impropio y
con una limitada precisin, lo cual podra no restablecer la precisin de
manipulacin del robot requerida en la aplicacin especfica. El calibrado mediante
muescas consiste en poner los ejes del robot sobre las muescas de calibrado
alinendolas con precisin visiva sin utilizar herramientas especficas y ejecutar
los mandos de calibrado eje por eje.
2-7
Descripcin General
2-8
mc-rb-NM_16-spt_01.FM
03/0608
Caractersticas Tcnicas
3.
CARACTERSTICAS TCNICAS
3.1 Generalidades
El presente captulo presenta las vistas y las caractersticas de los modelos de robot
SMART NM1.
Fig. 3.1 - SMART NM 25-2.2 In-line - SMART NM 25-2.2 Foundry vista general
Fig. 3.2 - SMART NM 45-2.0 In -line - SMART NM 45-2.0 Foundry vista general
Fig. 3.3 - SMART NM 25-2.2 Off-set - SMART NM 25-2.2 Foundry vista general
Fig. 3.4 - SMART NM 16 3.1 vista general
Fig. 3.5 - SMART NM 45-2.0 In-line Wash vista general
Tab. 3.1 - Caractersticas y prestaciones SMART NM
Tab. 3.2 - Caractersticas y prestaciones SMART NM off-set
Tab. 3.3 - Caractersticas y prestaciones SMART NM 16-3.1
Tab. 3.4 - Caractersticas y prestaciones SMART NM 45-2.0 In-line Wash
Las reas operativas y las dimensiones mximas de todos los robot disponibles, se
presentan en el Cap. reas Operativas y Dimensiones Mximas del Robot
mc-rc-NM_16-spt_01.FM
05/1108
3-1
Caractersticas Tcnicas
Fig. 3.1
3-2
- SMART NM 25-2.2 In-line SMART NM 25-2.2 Foundry vista general
mc-rc-NM_16-spt_01.FM
05/1108
Caractersticas Tcnicas
Fig. 3.2
mc-rc-NM_16-spt_01.FM
05/1108
- SMART NM 45-2.0 In -line SMART NM 45-2.0 Foundry vista general
3-3
Caractersticas Tcnicas
Fig. 3.3
3-4
- SMART NM 25-2.2 Off-set SMART NM 25-2.2 Foundry vista general
mc-rc-NM_16-spt_01.FM
05/1108
Caractersticas Tcnicas
Fig. 3.4
mc-rc-NM_16-spt_01.FM
05/1108
- SMART NM 16 3.1 vista general
3-5
Caractersticas Tcnicas
Fig. 3.5
3-6
- SMART NM 45-2.0 In-line Wash vista general
mc-rc-NM_16-spt_01.FM
05/1108
Caractersticas Tcnicas
Tab. 3.1 - Caractersticas y prestaciones SMART NM
VERSIN
SMART NM 25-2.2
SMART NM 45-2.0
Antropomorfo / 6 ejes
Antropomorfo / 6 ejes
Carga en el pulso
25kg(1)
45kg (1)
Carga adicional en el antebrazo
40kg(2)
40kg(2)
Par eje 4
176,58Nm
176,58Nm
Par eje 5
176,58Nm
176,58Nm
Par eje 6
117,72Nm
117,72Nm
Eje 1
+/-180(160/s)
+/-180(160/s)
Eje 2
+130/-53(150/s)
+130/-53(150/s)
Eje 3
+110/-170(160/s)
+110/-170(160/s)
Eje 4
+/- 2700 (250/s)
+/- 2700 (250/s)
Eje 5
+/-123 (250/s)
+/-123 (250/s)
Eje 6
+/-2700 (340/s)
+/-2700 (340/s)
+/- 0,1 mm
+/- 0,1 mm
685kg
680kg
ISO 9409-1-A100
ISO 9409-1-A100
Motores
AC brushless
AC brushless
Sistema de medicin de la posicin
con encoder
con encoder
12 kVA / 18,5 A
12 kVA / 18,5 A
Grado de proteccin
IP65 /IP67
IP65 /IP67
Temperatura de ejercicio
0 + 45[C]
0 + 45[C
- 40[C] + 60[C]
- 40 [C] + 60[C]
Rojo RAL 3020
Rojo RAL 3020
Al piso de techo; inclinado
(45 mx)
Al piso; de techo; inclinado
(45 mx.)
Estructura / n ejes
Carrera /(Velocidad)
Repetibilidad
Peso robot
Brida portaherramientas
Potencia total instalada
Temperatura de almacenamiento
Color robot (estndar)
Posicin de montaje
(1) Vase: el Cap.6. - Cargas al Pulso y Adicionales el prr. 6.2 Determinacin cargas mx. en la brida del pulso
(QF) a la pg. 6-2
(2) Vase: el Cap.6. - Cargas al Pulso y Adicionales el prr. 6.3 Cargas adicionales (QS) a la pg. 6-9
(*) Est disponible la versin Foundry con grado de proteccin IP67 en el pulso y los motores, para
garantizar la proteccin en ambientes con elevada temperatura.
mc-rc-NM_16-spt_01.FM
05/1108
3-7
Caractersticas Tcnicas
Tab. 3.2 - Caractersticas y prestaciones SMART NM off-set
VERSIN
SMART NM 25-2.2 off-set (*) SMART NM 45-2.0 off-set (*)
Estructura / n ejes
Antropomorfo / 6 ejes
Antropomorfo / 6 ejes
Carga en el pulso
25kg(1)
45kg (1)
Carga adicional en el antebrazo
40kg(2)
40kg(2)
Par eje 4
176,58Nm
176,58Nm
Par eje 5
176,58Nm
176,58Nm
Par eje 6
98,1Nm
98,1Nm
Eje 1
+/-180(160/s)
+/-180(160/s)
Eje 2
+130/-53(150/s)
+130/-53(150/s)
Eje 3
+110/-170(160/s)
+110/-170(160/s)
Eje 4
+/- 2700 (250/s)
+/- 2700 (250/s)
Eje 5
+/- 2700 (250/s)
+/- 2700 (250/s)
Eje 6
+/-2700 (340/s)
+/-2700 (340/s)
+/- 0,06 mm
+/- 0,06 mm
685kg
680kg
ISO 9409-1-A100
ISO 9409-1-A100
Motores
AC brushless
AC brushless
Sistema de medicin de la posicin
con encoder
con encoder
12 kVA / 18,5 A
12 kVA / 18,5 A
Grado de proteccin
IP65 /IP67
IP65 /IP67
Temperatura de ejercicio
0 + 45[C]
0 + 45[C
- 40[C] + 60[C]
- 40 [C] + 60[C]
Rojo RAL 3020
Rojo RAL 3020
Al piso de techo; inclinado
(45 mx)
Al piso de techo; inclinado
(45 mx)
Carrera /(Velocidad)
Repetibilidad
Peso robot
Brida portaherramientas
Potencia total instalada
Temperatura de almacenamiento
Color robot (estndar)
Posicin de montaje
(1) Vase: el Cap.6. - Cargas al Pulso y Adicionales el prr. 6.2 Determinacin cargas mx. en la brida del pulso
(QF) a la pg. 6-2
(2) Vase: el Cap.6. - Cargas al Pulso y Adicionales el prr. 6.3 Cargas adicionales (QS) a la pg. 6-9
(*) Est disponible la versin Foundry con grado de proteccin IP67 en el pulso y los motores, para
garantizar la proteccin en ambientes con elevada temperatura.
3-8
mc-rc-NM_16-spt_01.FM
05/1108
Caractersticas Tcnicas
Tab. 3.3 - Caractersticas y prestaciones SMART NM 16-3.1
VERSIN
SMART NM 16-3.1
Estructura / n ejes
Antropomorfo / 6 ejes
Carga en el pulso
16kg(1)
Carga adicional en el antebrazo
10kg(2)
Par eje 4
41Nm
Par eje 5
41Nm
Par eje 6
23Nm
Carrera /(Velocidad)
Repetibilidad
Peso robot
Brida portaherramientas
Eje 1
+/-180(120/s)
Eje 2
+130/-53(100/s)
Eje 3
+110/-170(100/s)
Eje 4
+/- 2700 (250/s)
Eje 5
+/-120(350/s)
Eje 6
+/-2700 (340/s)
+/- 0,1 mm
685kg
ISO 9409-1-A63
Motores
AC brushless
Sistema de medicin de la posicin
con encoder
Potencia total instalada
12 kVA / 18,5 A
Grado de proteccin
IP65 / IP67
Temperatura de ejercicio
0 + 45[C]
Temperatura de almacenamiento
Color robot (estndar)
Posicin de montaje
- 40[C] + 60[C]
Rojo RAL 3020
Al piso; de techo;
inclinado (45 mx)
(1) Vase: el Cap.6. - Cargas al Pulso y Adicionales el prr. 6.2 Determinacin cargas mx. en la brida del pulso
(QF) a la pg. 6-2
(2) Vase: el Cap.6. - Cargas al Pulso y Adicionales el prr. 6.3 Cargas adicionales (QS) a la pg. 6-9
mc-rc-NM_16-spt_01.FM
05/1108
3-9
Caractersticas Tcnicas
Tab. 3.4 - Caractersticas y prestaciones
SMART NM 45-2.0 In-line Wash
VERSIN
SMART NM 45-2.0 In-line Wash
Estructura / n ejes
Antropomorfo / 6 assi
Carga en el pulso
45 kg (1)
Carga adicional en el antebrazo
40 kg (2)
Par eje 4
176,58 Nm
Par eje 5
176,58 Nm
Par eje 6
117,72Nm
Carrera /(Velocidad)
Eje 1
+/-180 (160/s)
Eje 2
+130/-53 (150/s)
Eje 3
+110/-170 (160/s)
Eje 4
+/- 2700 (250/s)
Eje 5
+/- 123 (250/s)
Eje 6
+/-2700 (340/s)
Mx. extensin horizontal
Repetibilidad
Peso robot
Brida portaherramientas
2000mm
+/- 0,06 mm
680 kg
ISO 9409-1-A100
Motores
AC brushless
Sistema de medicin de la posicin
con encoder
Potencia total instalada
12 kVA / 18,5 A
Grado de proteccin (3)
IP67
Temperatura de ejercicio
0 + 45[C]
Mx. presin de el jet para la equipo que lava
Temperatura de almacenamiento
Posicin de montaje
600 bar
- 40[C] + 60[C]
Al piso;
(1) Vase: el Cap.6. - Cargas al Pulso y Adicionales el prr. 6.2 Determinacin cargas mx. en la brida del pulso
(QF) a la pg. 6-2
(2) Vase: el Cap.6. - Cargas al Pulso y Adicionales el prr. 6.3 Cargas adicionales (QS) a la pg. 6-9
(3) Le robot no se puede exponer a la presin del waterjet en manera directa
3-10
mc-rc-NM_16-spt_01.FM
05/1108
reas Operativas y Dimensiones Mximas del Robot
4.
REAS OPERATIVAS Y
DIMENSIONES MXIMAS DEL
ROBOT
El presente captulo presenta los dibujos de las reas operativas que se puede obtener
con los robots SMART NM y los dibujos relativos a las limitaciones de las reas
resultantes en el caso que se instale los finales de carrera mecnicos
SMART NM 25-2.2 In line - SMART NM 25-2.2 Foundry - rea operativa
SMART NM 45-2.0 In line - SMART NM 45-2.0 Foundry rea operativa
SMART NM 25-2.2 off-set - SMART NM 25-2.2 Foundry - rea operativa
SMART NM 45-2.0 off-set - SMART NM 45-2.0 Foundry - rea operativa
SMART NM 16 3.1 rea Operativa
SMART NM 25-2.2 In line - SMART NM 25-2.2 Foundry - Limitacin rea operativa
SMART NM 45-2.0 In line - SMART NM 45-2.0Foundry - Limitacin rea operativa
SMART NM 25-2.2 off-set - SMART NM 25-2.2Foundry - Limitacin rea operativa
SMART NM 45-2.0 off-set - SMART NM 45-2.0 Foundry -Limitacin rea operativa
SMART NM 16-3.1 Limitacin rea operativa
Las reas operativas estn trazadas en el centro del pulso.
mc-rc-NM_16-spt_02.FM
01/1106
4-1
reas Operativas y Dimensiones Mximas del Robot
SMART NM 25-2.2 In line SMART NM 25-2.2 Foundry - rea operativa
4-2
mc-rc-NM_16-spt_02.FM
01/1106
reas Operativas y Dimensiones Mximas del Robot
SMART NM 25-2.2 In line SMART NM 25-2.2 Foundry - rea operativa
Pos
Ax.2
Ax.3
[mm]
[mm]
[deg]
[deg]
567,4
279,47
+40
-170
179,47
-479,8
+130
-110
1810,61
-278,46
+130
-13,24
-832,15
2118,44
-42
-13,24
-870,33
532,86
-42
+80
-520,99
660,29
-15
+110
828,19
1570,32
+108,13
+110
8
9
861,13
1462,4
941,79
1750
-53
-53
0
-136,48
-170
-90
Juntas en posicin de calibracin (pos.9)
Eje 1
0
mc-rc-NM_16-spt_02.FM
01/1106
Eje 2
0
Eje 3
-90
Eje 4
0
Eje 5
0
Eje 6
0
4-3
reas Operativas y Dimensiones Mximas del Robot
SMART NM 45-2.0 In line SMART NM 45-2.0 Foundry rea operativa
4-4
mc-rc-NM_16-spt_02.FM
01/1106
reas Operativas y Dimensiones Mximas del Robot
SMART NM 45-2.0 In line SMART NM 45-2.0 Foundry rea operativa
[mm]
[mm]
[deg]
[deg]
526,21
383,81
+70
-170
296,63
-244,87
+130
-120
1625,67
-278,46
+130
-17,10
-670,61
1939,03
-42
-17,10
-658,32
664,84
-42
+80
-316,2
803,68
-15
+110
618,52
1434,16
+88,43
+110
8
9
638,37
1212,4
1055,29
1750
-53
-53
0
-144,21
-170
-90
Juntas en posicin de calibracin (pos.9)
Eje 1
0
mc-rc-NM_16-spt_02.FM
01/1106
Eje 2
0
Eje 3
-90
Eje 4
0
Eje 5
0
Eje 6
0
4-5
reas Operativas y Dimensiones Mximas del Robot
SMART NM 25-2.2 off-set SMART NM 25-2.2 Foundry - rea operativa
4-6
mc-rc-NM_16-spt_02.FM
01/1106
reas Operativas y Dimensiones Mximas del Robot
SMART NM 25-2.2 off-set SMART NM 25-2.2 Foundry - rea operativa
Pos
1
Ax.2
Ax.3
[mm]
[mm]
[deg]
[deg]
567,4
279,47
+40
-170
179,47
-479,8
+130
-110
1810,61
-278,46
+130
-13,24
-832,15
2118,44
-42
-13,24
-805,47
532,86
-42
+80
-520,99
660,29
828,19
1570,32
8
9
861,13
1462,4
941,79
1750
-15
+110
+108,13
+110
-53
-53
0
-136,48
-170
-90
Juntas en posicin de calibracin (pos.9)
Eje1
0
mc-rc-NM_16-spt_02.FM
01/1106
Eje 2
0
Eje 3
-90
Eje 4
0
Eje 5
+90
Eje 6
0
4-7
reas Operativas y Dimensiones Mximas del Robot
SMART NM 45-2.0 off-set SMART NM 45-2.0 Foundry - rea operativa
4-8
mc-rc-NM_16-spt_02.FM
01/1106
reas Operativas y Dimensiones Mximas del Robot
SMART NM 45-2.0 off-set SMART NM 45-2.0 Foundry - rea operativa
Pos
1
Ax.2
Ax.3
[mm]
[mm]
[deg]
[deg]
526,21
383,81
+70
-170
296,63
-244,87
+130
-120
1625,67
-278,46
+130
-17,10
-670,61
1939,03
-42
-17,10
-658,32
664,84
-42
+80
-316,2
803,68
618,52
1434,16
8
9
638,37
1212,4
1055,29
1750
-15
+110
+88,43
+110
-53
-53
0
-144,21
-170
-90
Juntas en posicin de calibracin (pos.9)
Eje1
0
mc-rc-NM_16-spt_02.FM
01/1106
Eje 2
0
Eje 3
-90
Eje 4
0
Eje 5
+90
Eje 6
0
4-9
reas Operativas y Dimensiones Mximas del Robot
SMART NM 16 3.1 rea Operativa
4-10
mc-rc-NM_16-spt_02.FM
01/1106
reas Operativas y Dimensiones Mximas del Robot
SMART NM 16 3.1 rea Operativa
Pos
1
2
3
4
5
6
X
Z
[mm]
[mm]
+540,56 +166,72
-70,99
-747,32
+2468,32 -985,52
-1756,31 +2374,90
-1466,68
+216
-1007,30 +778,63
+900,64
+2065,55
8
9
+958,04
+1929,70
+970,37
+2150
Eje 2
[deg]
+45
+130
+130
-53
-53
-15
Eje 3
[deg]
-170
-145
-9,28
-9,28
+80
+110
+94,67
+110
-53
-53
0
-128,56
-170
-90
Juntas en posicin de calibracin (pos.10)
Eje 1
0
mc-rc-NM_16-spt_02.FM
01/1106
Eje 2
0
Eje 3
-90
Eje 4
0
Eje 5
0
Eje 6
0
4-11
reas Operativas y Dimensiones Mximas del Robot
SMART NM 25-2.2 In line SMART NM 25-2.2 Foundry - Limitacin rea
operativa
(1) Curva rea operativa resultante con limitaciones de las carreras
(2) Curva rea operativa estndar sin limitacin de las carreras
4-12
mc-rc-NM_16-spt_02.FM
01/1106
reas Operativas y Dimensiones Mximas del Robot
SMART NM 45-2.0 In line SMART NM 45-2.0Foundry - Limitacin rea
operativa
(1) Curva rea operativa resultante con limitaciones de las carreras
(2) Curva rea operativa estndar sin limitacin de las carreras
mc-rc-NM_16-spt_02.FM
01/1106
4-13
reas Operativas y Dimensiones Mximas del Robot
SMART NM 25-2.2 off-set SMART NM 25-2.2Foundry - Limitacin rea
operativa
(1) Curva rea operativa resultante con limitaciones de las carreras
(2) Curva rea operativa estndar sin limitacin de las carreras
4-14
mc-rc-NM_16-spt_02.FM
01/1106
reas Operativas y Dimensiones Mximas del Robot
SMART NM 45-2.0 off-set SMART NM 45-2.0 Foundry -Limitacin rea
operativa
(1) Curva rea operativa resultante con limitaciones de las carreras
(2) Curva rea operativa estndar sin limitacin de las carreras
mc-rc-NM_16-spt_02.FM
01/1106
4-15
reas Operativas y Dimensiones Mximas del Robot
SMART NM 16-3.1 Limitacin rea operativa
(1) Curva rea operativa resultante con limitaciones de las carreras
(2) Curva rea operativa estndar sin limitacin de las carreras
4-16
mc-rc-NM_16-spt_02.FM
01/1106
Brida Robot
5.
BRIDA ROBOT
5.1 Brida portaherramientas
Este captulo presenta el diseo de la brida portaherramientas con dimensiones e
interejes de los agujeros para el acoplamiento de los dispositivos y el diseo de la
opcin til Calibrado, utilizado para calcular con precisin la referencia del centro de la
brida en el caso de instalacin de dispositivos especficos de la aplicacin.
mc-rc-NM_16-spt_03.FM
00/0205
Fig. 5.1 - SMART NM Brida portaherramientas
Fig. 5.2 - SMART NM off-set Brida portaherramientas
Fig. 5.3 - SMART NM 16 - 3.1 Brida portaherramientas
5-1
Brida Robot
Fig. 5.1
1.
2.
5-2
- SMART NM Brida portaherramientas
Clavija de centraje dispositivos
til calibrado (cdigo 81783801)
mc-rc-NM_16-spt_03.FM
00/0205
Brida Robot
Fig. 5.2
1.
2.
mc-rc-NM_16-spt_03.FM
00/0205
- SMART NM off-set Brida portaherramientas
Clavija de centraje dispositivos
til calibrado (cdigo 81783801)
5-3
Brida Robot
Fig. 5.3
1.
5-4
- SMART NM 16 - 3.1 Brida portaherramientas
til calibrado (cdigo 81783801)
mc-rc-NM_16-spt_03.FM
00/0205
Cargas al Pulso y Adicionales
6.
CARGAS AL PULSO Y
ADICIONALES
6.1 Generalidades
El presente captulo describe los procedimientos para determinar la carga mxima
aplicable en la brida del robot y la eventual carga adicional aplicada en el antebrazo.
Capacidad de carga aplicable en la brida robot en relacin a la distancia
baricntrica
Fig. 6.3 - SMART NM 25-2.2 Capacidad carga mxima en la brida
Fig. 6.4 - SMART NM 45-2.0 Capacidad carga mxima en la brida
Fig. 6.5 - SMART NM 25-2.2 off-set Capacidad carga mxima en la brida
Fig. 6.6 - SMART NM 45-2.0 off-set Capacidad carga mxima en la brida
Fig. 6.7 - SMART NM 16-3.1 Capacidad carga mxima en la brida
reas en las cuales est admitida la posicin del baricentro relativo a la carga
adicional
Fig. 6.8 - SMART NM Posicin baricentro cargas adicionales
Interejes y dimensiones de los agujeros para el acoplamiento de eventuales
cargas adicionales aplicadas en el antebrazo del robot.
Fig. 6.10 - SMART NM Perforaciones para el acoplamiento de los
dispositivos en el antebrazo
Abreviaciones
En el captulo se han adoptado las siguientes abreviaciones:
QF =Carga mx. aplicada en la brida;
QS = Carga adicional aplicada en el antebrazo;
QT = Carga total mx. aplicada sobre el robot;
LZ = Distancia baricentro carga P del plano brida unin tiles;
LXY = Distancia baricentro carga P del eje 6
L2 = Distancia eje 5 del plano brida unin tiles (vase el esquema).
mc-rc-NM_16-spt_04.FM
00/0306
6-1
Cargas al Pulso y Adicionales
Fig. 6.1
- Coordinadas baricentro carga aplicada en la brida
6.2 Determinacin cargas mx. en la brida del
pulso (QF)
La carga mx. aplicable en la brida se define utilizando los grficos de carga al pulso
donde las curvas de carga mxima QF son trazadas en funcin de las coordinadas LZ
y LXY del baricentro de la carga.
El rea subtensa por las curvas de carga define las distancias baricntricas admitidas
para la aplicacin de la carga especificada en la misma.
Fig. 6.2
6-2
- Notas para la definicin de los grficos de carga
mc-rc-NM_16-spt_04.FM
00/0306
Cargas al Pulso y Adicionales
Para valores de carga o inercia diversos de aquellos indicados en los grficos, se
puede trazar una curva especfica utilizando las siguientes frmulas:
Kz = (a - 0,25 x J0) / M
L1 = 2000 [- b + (c + Kz)0,5]
Kxy = (d - 0,25 x J0) / M
Lxy = 2000 x [ - e +(f + Kxy)0,5]
donde:
a, b; c; d; e; f = constantes numricas dependientes del tipo de pulso (vanse los
grficos de Capacidad de Carga).
J0 (kgm2) = momento de inercia mximo baricntrico de la carga total aplicada a
la brida
M (kg) = masa total aplicada a la brida
L2 = distancia del plano brida del eje 5 correspondiente al punto de centro de la
curva L1 (vase el esquema)
De todas maneras hay que verificar las siguientes condiciones:
L1 H / M; Lxy N / M
donde: H y N = constantes numricas dependientes del tipo de pulso
mc-rc-NM_16-spt_04.FM
00/0306
6-3
Cargas al Pulso y Adicionales
Lz [mm]
Fig. 6.3
- SMART NM 25-2.2 Capacidad carga mxima en la brida
900
800
(a) = 15 kg
(b) = 3 kgm2
700
(a) = 18 kg
(b) = 3,5 kgm2
600
(a) = 20 kg
(b) = 4 kgm2
(a) = 23 kg
(b) = 4,5 kgm2
500
(a) =25 kg
(b) = 5 kgm2
400
300
200
100
0
0
100
200
300
400
500
600
700
800
900
Lxy [mm]
1.
2.
(a) Masa
(b) Inercia
Constantes numricas a aplicar a las frmulas presentadas en Determinacin
cargas mx. en la brida del pulso (QF):
a=9,045; b=0,243; c=0,059; d=5,355; e=0,263; f=0,069;
H=18000; N=12000; L2 = 175mm
La inercia especificada en las curvas del grfico se refiere al baricentro de la
carga aplicada en la brida.
6-4
mc-rc-NM_16-spt_04.FM
00/0306
Cargas al Pulso y Adicionales
Lz [mm]
Fig. 6.4
- SMART NM 45-2.0 Capacidad carga mxima en la brida
700
600
500
(a) =25 kg
(b) = 3 kgm2
400
(a) = 30 kg
(b) = 3,5 kgm2
(a) = 35 kg
(b) = 4 kgm2
300
(a) = 40 kg
(b) = 4,5 kgm2
200
(a) = 45 kg
(b) = 5 kgm2
100
0
0
100
200
300
400
500
600
700
Lxy [mm]
1.
2.
(a) Masa
(b) Inercia
Constantes numricas a aplicar a las frmulas presentadas en Determinacin
cargas mx. en la brida del pulso (QF)a=8,709; b=0,225; c=0,051; d=4,866;
e=0,227; f=0,052;
H=18000; N=12000; L2 = 175mm
La inercia especificada en las curvas del grfico se refiere al baricentro de la
carga aplicada en la brida.
mc-rc-NM_16-spt_04.FM
00/0306
6-5
Cargas al Pulso y Adicionales
Lz [mm]
Fig. 6.5
- SMART NM 25-2.2 off-set Capacidad carga mxima en
la brida
900
(a) = 15 kg
(b) = 3 kgm2
800
(a) = 18 kg
(b) = 3,5 kg m2
700
(a) = 20 kg
(b) = 4 kgm2
600
(a) = 23 kg
(b) = 4,5 kgm2
500
(a) =25 kg
(b) = 5 kgm2
400
300
200
100
0
0
100
200
300
400
500
600
700
800
900
Lxy [mm]
1.
2.
(a) Masa
(b) Inercia
Constantes numricas a aplicar a las frmulas presentadas en Determinacin
cargas mx. en la brida del pulso (QF)
a=8,787; b=0,243; c=0,059; d=4,618; e=0,289; f=0,084;
H=18000; N=10000; L2 = 170mm
La inercia especificada en las curvas del grfico se refiere al baricentro de la
carga aplicada en la brida.
6-6
mc-rc-NM_16-spt_04.FM
00/0306
Cargas al Pulso y Adicionales
Fig. 6.6
- SMART NM 45-2.0 off-set Capacidad carga mxima en
la brida
Lz [mm]
700
600
(a) =25 kg
(b) = 3 kg m2
500
(a) = 30 kg
(b) = 3,5 kg m2
400
(a) = 35 kg
(b) = 4 kg m2
300
(a) = 40 kg
(b) = 4,5 kg m2
200
(a) = 45 kg
(b) = 5 kg m2
100
0
0
100
200
300
400
500
600
700
Lxy [mm]
1.
2.
(a) Masa
(b) Inercia
Constantes numricas a aplicar a las frmulas presentadas en Determinacin
cargas mx. en la brida del pulso (QF)a=8,709; b=0,225; c=0,051; d=3,600;
e=0,198; f=0,039;
H=18000; N=10000; L2 = 170mm
La inercia especificada en las curvas del grfico se refiere al baricentro de la
carga aplicada en la brida.
mc-rc-NM_16-spt_04.FM
00/0306
6-7
Cargas al Pulso y Adicionales
Lz [mm]
Fig. 6.7
(a) = 6 kg
(b) = 0,2 kg*m2
- SMART NM 16-3.1 Capacidad carga mxima en la brida
500
450
400
(a) = 8 kg
(b) = 0,25 kg*m2
350
(a) = 10 kg
(b) = 0,3 kg*m2
300
250
(a) = 12 kg
(b) = 0,35 kg*m2
200
(a) = 14 kg
(b) = 0,4 kg*m2
150
(a) = 16 kg
(b) = 0,5 kg*m2
100
50
0
0
50
100
150
200
250
300
350
400
450
500
550
Lxy [mm]
1.
2.
(a) Masa
(b) Inercia
Constantes numricas a aplicar a las frmulas presentadas en Determinacin
cargas mx. en la brida del pulso (QF)
a=1,576; b=0,281; c=0,079; d=0,632; e=0,207; f=0,043;
H=4160; N=2320; L2 = 120mm
Linerzia specificata nelle curve del grafico riferita al baricentro del carico
applicato sulla flangia.
6-8
mc-rc-NM_16-spt_04.FM
00/0306
Cargas al Pulso y Adicionales
6.3 Cargas adicionales (QS)
Adems de la carga en la brida QF, con excepcin de los robot de versiones SH, se
puede aplicar en el antebrazo una carga adicional QS; los valores de dichas cargas se
presentan en la Tab. 6.1 - Cargas mximas aplicables.
En cada aplicacin, el baricentro de la carga aplicada sobre la brida QF debe estar
dentro del rea subtensa por las curvas de los grficos presentados en las Fig. 6.3,
Fig. 6.4, Fig. 6.7, adems, el baricentro de la carga adicional QS debe estar dentro del
rea del grfico presentado en la Fig. 6.8 - SMART NM Posicin baricentro cargas
adicionales y la Fig. 6.9 - SMART NM 16-3.1 Posicin baricentro cargas adicionales.
Para la instalacin de dispositivos especiales en el robot se pueden utilizar las
perforaciones obtenidas en su antebrazo y que se ilustran en la Fig. 6.10 - SMART NM
Perforaciones para el acoplamiento de los dispositivos en el antebrazo.
Tab. 6.1 - Cargas mximas aplicables
SMART NM
25-2.2 / off-set
SMART NM
45-2.0 / off-set
SMART NM 16-3.1
65
85
26 kg
En la brida QF
25kg
45kg
16kg
Adicional en el antebrazo QS
40kg
40kg
10kg
Carga total mx.
Carga total mx. aplicable al robot QT
mc-rc-NM_16-spt_04.FM
00/0306
6-9
Cargas al Pulso y Adicionales
6-10
Fig. 6.8
- SMART NM Posicin baricentro cargas adicionales
Fig. 6.9
- SMART NM 16-3.1 Posicin baricentro cargas
adicionales
mc-rc-NM_16-spt_04.FM
00/0306
Cargas al Pulso y Adicionales
Fig. 6.10 - SMART NM Perforaciones para el acoplamiento de los
dispositivos en el antebrazo
mc-rc-NM_16-spt_04.FM
00/0306
6-11
Cargas al Pulso y Adicionales
6-12
mc-rc-NM_16-spt_04.FM
00/0306
Predisposiciones para la Instalacin del Robot
7.
PREDISPOSICIONES PARA LA
INSTALACIN DEL ROBOT
Antes de efectuar cualquier operacin de instalacin, hay que leer atentamente el
Cap.1. - Prescripciones Generales de Seguridad.
El robot debe estar combinado a la Unidad de Control C4G. Est prohibido
cualquier otro empleo. Las eventuales derogaciones deben estar expresamente
autorizadas por COMAU Robotics & Service.
7.1 Condiciones ambientales
El ambiente de empleo de los robot es el normal ambiente del taller. El pulso del robot
cuenta con particulares protecciones (IP67) que lo hacen apto para aplicaciones en
ambientes agresivos debido a polvos y vapores a elevadas temperaturas como, por
ejemplo, la manipulacin de piezas en talleres de fundicin.
7.1.1
7.1.2
Datos ambientales
Temperatura ambiente de funcionamiento: 0C 45C
Humedad relativa: 5% 95% sin lquido de condensacin.
Temperatura ambiente de almacenamiento: -40 C 60 C.
Mximo gradiente de temperatura: 1,5 C/min.
Espacio operativo
Las dimensiones mximas de la zona operativa del robot estn ilustradas en los
grficos trazados en el centro pulso del Cap. REAS OPERATIVAS Y DIMENSIONES
MXIMAS DEL ROBOT en el manual ESPECIFICACIONES TCNICAS.
7.1.3
Fijacin a una placa en acero
El robot puede estar fijado a una placa en acero predispuesta con los agujeros para los
tornillos y las clavijas; el grupo tornillos y clavijas es opcional (vase la Fig. 7.1 - Grupo
tornillos y clavijas (opcional); los tornillos y clavijas necesarios para la fijacin del robot
son opcionales.
7.1.4
Fijacin de placa nivelable (opcional)
Para montar el robot se puede utilizar un grupo opcional compuesto por 4 placas de
fijacin al piso y por una placa en acero fijada al robot y que se pueden nivelar actuando
sobre los relativos tornillos (vase Grupo placa nivelable del Cap. OPCIONES en el
manual ESPECIFICACIONES TCNICAS).
mc-rc-NM-2-pred-int_01.FM
02/1108
7-1
Predisposiciones para la Instalacin del Robot
Fig. 7.1
- Grupo tornillos y clavijas (opcional)
El grupo tornillos y clavijas es un suministro estndar con el robot
1.
2.
3.
4.
5.
6.
7.
7-2
Centrado = 30 mm L = 80 mm (cant. = 1)
Centrado = 30 mm L = 60 mm (cant. = 1)
Tornillo Allen de cabeza cilndrica M 10 x 90 (8.8) (cant. = 1)
Tornillo Allen de cabeza cilndrica M 10 x 70 (8.8) (cant. = 1)
Tornillo de cabeza hexagonal parcialmente roscada M 20 x 80 (8.8.) (cant. = 4)
Arandela elstica abierta = 20mm (cant. = 4)
Arandela plana = 20 mm (cant. = 4)
mc-rc-NM-2-pred-int_01.FM
02/1108
Predisposiciones para la Instalacin del Robot
7.2 Esfuerzos transmitidos a la estructura de
soporte
Los cimientos sobre los cuales se instala el robot no deben sufrir vibraciones que
deriven de otras mquinas (por ejemplo martinetes, prensas, etc.).
Debido a los notables esfuerzos que el robot transmite al piso y a la necesidad de
disponer de adecuadas superficies de apoyo, no est prevista la fijacin directa
al piso.
La superficie de fijacin del robot debe ser horizontal.
Fig. 7.2
- Esfuerzos transmitidos a la estructura de soporte
Instalacin de piso
Instalacin de techo
Fo
Mk
Fv
Fv
Mk
Fo
Mr
Mr
SMART NM; SMART NM off-set; SMART NM Wash
Movimiento robot
Fv (N)
Fo (N)
Mr (Nm)
Mk (Nm)
En aceleracin
8600
4500
3600
12500
En frenado de emergencia
9600
8000
7200
20000
SMART NM16 3.1
Movimiento robot
mc-rc-NM-2-pred-int_01.FM
02/1108
Fv (N)
Fo (N)
Mr (Nm)
Mk (Nm)
En aceleracin
8100
2200
3250
8600
En frenado de emergencia
9000
4400
6500
12700
7-3
Predisposiciones para la Instalacin del Robot
7.3 Instalacin del robot sobre un plano
inclinado
Se puede fijar el robot sobre un plano inclinado max 45 (vase la Fig. 7.3). En dicho
caso es necesario considerar una limitacin de carrera del eje 1 resultante del grfico
en la Fig. 7.4 - SMART NM; SMART NM off-set; SMART NM wash-Limitacin de la
carrera del eje 1 con el robot fijado sobre un plano inclinado.
Por ejemplo, con el robot fijado sobre un plano inclinado de 40, la rotacin del eje 1
estar limitada a 30
Fig. 7.3
7-4
- Instalacin del robot sobre un plano inclinado
mc-rc-NM-2-pred-int_01.FM
02/1108
Predisposiciones para la Instalacin del Robot
Fig. 7.4 - SMART NM; SMART NM off-set; SMART NM
wash-Limitacin de la carrera del eje 1 con el robot fijado
sobre un plano inclinado
95
90
85
80
75
70
CARRERA ADMISIBLE DEL EJE 1 [deg]
65
60
55
50
45
40
35
30
25
20
15
10
5
0
0
10
20
30
40
50
NGULO DE INCLINACIN DEL PLANO DE FIJACIN DE LA BASE DEL ROBOT [deg]
mc-rc-NM-2-pred-int_01.FM
02/1108
7-5
Predisposiciones para la Instalacin del Robot
Fig. 7.5
- SMART NM 16 3.1 Limitacin de la carrera del
Ax 1 [deg]
eje 1 con el robot fijado sobre un plano
inclinado
95
90
85
80
75
70
65
60
55
50
45
40
35
30
25
20
15
10
5
0
0
7-6
10
20
30
40
50
[deg]
mc-rc-NM-2-pred-int_01.FM
02/1108
Opciones
8.
OPCIONES
8.1 Descripcin general
Antes de comenzar a efectuar cualquier operacin de instalacin hay que leer
atentamente el Cap.1. - Prescripciones Generales de Seguridad.
El robot debe ser conectado a la Unidad de Control C4G. No est permitido
ningn otro uso. Cualquier exencin debe estar especficamente autorizada por
COMAU Robotics & Service.
Tab. 8.1 - Aplicabilidad de las opciones
Aplicabilidad
Cdigo
Descripcin
NM
off set
NM
NM
16 3.1
82212100
Grupo final de carrera mecnico regulable eje 1 (cdigo
82212100)
82212200
Grupo final de carrera mecnico regulable eje 2 (cdigo
82212200)
82212300
Grupo final de carrera mecnico regulable eje 3 (cdigo
82212300)
Grupo parcializacin del rea de trabajo eje 1 (cdigo
CR82213400)
81783801
Grupo til calibrado (cdigo 81783801
82212400
Kit para calibracin manual SMART NM-NM off set (cdigo
82212400)
82282100
Kit para calibracin manual SMART NM 16 3.1 (cdigo
82282100)
82212700
Grupo placa nivelable (cdigo 82212700)
82212600
Grupo plataforma elevadora de horquillas (cdigo 82212600)
82284200
Grupo proteccin de las conexiones de clasificacin (marchable
cdigo 82284200)
82211900
Unidad tornillos y clavijas para la fijacin del robot (cdigo
82211900)
CR82213400
82212400
82282100
Kit para calibracin manual
mc-rc-NM_16-spt_05.FM
01/1006
8-1
Opciones
8.2 Grupo final de carrera mecnico regulable
eje 1 (cdigo 82212100)
8.2.1
Descripcin
El grupo final de carrera mecnico regulable eje 1 permite limitar la carrera del eje 1 en
los dos sentidos de trabajo con pasos de 22,5. El grupo est formado por dos paros
mecnicos que hay que fijar mediante los tornillos en dotacin, en los asientos
obtenidos en la base del robot, para limitar la carrera del eje 1 en los dos sentidos; si
fuese necesario limitar la carrera en un slo sentido, se utilizar solamente uno de los
dos paros.
El grupo final de carrera mecnico regulable eje 1 satisface las condiciones de
"seguridad hombre", puesto que est en condiciones de absorber toda la energa
cintica del eje.
ADVERTENCIA
Tras la intervencin del final de carrera (choque), hay que sustituir las siguientes
piezas:
paro mecnico y tornillos de fijacin;
tacos en goma en el batiente y tornillos de fijacin.
Adems, hay que comprobar la integridad de las partes interesadas del robot, por
ejemplo:
base en la zona de fijacin del grupo;
columna en la zona de fijacin del batiente;
dispositivo manipulado por el robot.
La no sustitucin de las partes daadas, perjudica el correcto funcionamiento (y
por lo tanto el paro del robot) en el caso de sucesivas intervenciones.
Tras un choque, verificar el huelgo del eje 1 y recuperar los eventuales
aflojamientos del eje.
8-2
mc-rc-NM_16-spt_05.FM
01/1006
Opciones
mc-rc-NM_16-spt_05.FM
01/1006
8-3
Opciones
8.3 Grupo final de carrera mecnico regulable
eje 2 (cdigo 82212200)
8.3.0.1
Descripcin
El grupo final de carrera mecnico regulable eje 2 permite reducir la carrera del eje 2 en
los dos sentidos de trabajo con pasos de 15.
El grupo est formado por dos series de 2 tacos que hay que fijar en la estructura de la
columna para ponerlos contra los topes elsticos presentes en el robot.
La carrera se puede limitar: en el sentido positivo a +115 a +100 (en lugar de +130
de carrera estndar), en el sentido negativo a -38 -23 (en lugar de -53 carrera
estndar).
El grupo final de carrera mecnico regulable eje 2 permite satisfacer las condiciones de
"seguridad hombre", puesto que est en condiciones de absorber toda la energa
cintica del eje.
La limitacin del rea operativa obtenida instalando el grupo final de carrera est
presentada en los esquemas Limitacin del rea Operativa del Cap. reas Operativas
y Dimensiones Mximas del Robot.
ADVERTENCIA
Tras la intervencin del final de carrera (choque), es necesario verificar la
funcionalidad de las siguientes piezas:
paro mecnico;
tacos en goma y tornillos de fijacin;
dispositivo manipulado por el robot.
La no sustitucin de las partes daadas, perjudica el correcto funcionamiento (y
por lo tanto el paro del robot) en el caso de sucesivas intervenciones.
8-4
mc-rc-NM_16-spt_05.FM
01/1006
Opciones
mc-rc-NM_16-spt_05.FM
01/1006
1.
2.
3.
4.
Tope final de carrera (cant. 2)
Tope final de carrera (cant. 2)
Tornillo Allen de cabeza cilndrica M 10x20 (cl 8.8) (cant. 16)
Estribo (cant. 4)
a.
Final de carrera opcional
b.
Final de carrera estndar
8-5
Opciones
8.4 Grupo final de carrera mecnico regulable
eje 3 (cdigo 82212300)
8.4.1
Descripcin
El grupo final de carrera mecnico regulable eje 3 desarrolla la funcin de antivuelco del
antebrazo inhibiendo el acceso del antebrazo a la zona de trabajo trasera del robot.
El grupo est formado por un tope que hay que fijar en la superficie lateral del cuerpo
del antebrazo mediante los tornillos y el pasador entregados con el equipo: en caso de
choque, el tope de paro reacciona sobre el tope fijo siempre presente en el brazo del
robot. La carrera til del eje 3 est comprendida entre 0 y -170 mientras que la carrera
inhibida est comprendida entre 0 a +110
El grupo final de carrera mecnico regulable eje 3 permite satisfacer las condiciones de
"seguridad hombre" puesto que est en condiciones de absorber toda la energa
cintica del eje.
La limitacin del rea operativa obtenida instalando el grupo final de carrera est
presentada en el Cap. reas Operativas y Dimensiones Mximas del Robot.
ADVERTENCIA
Tras la intervencin del final de carrera (choque), es necesario verificar la
funcionalidad de las siguientes piezas:
paro mecnico;
tacos en goma y tornillos de fijacin;
dispositivo manipulado por el robot.
La no sustitucin de las partes daadas, perjudica el correcto funcionamiento (y
por lo tanto el paro del robot) en el caso de sucesivas intervenciones.
8-6
mc-rc-NM_16-spt_05.FM
01/1006
Opciones
1.
2.
mc-rc-NM_16-spt_05.FM
01/1006
Tope final de carrera (cant. 2)
Tornillo Allen de cabeza cilndrica M 10x20 (cl 8.8) (cant. 8)
8-7
Opciones
8.5 Grupo parcializacin del rea de trabajo eje 1
(cdigo CR82213400)
8.5.1
Descripcin
La parcializacin de la carrera de trabajo del eje 1 est en funcin del ciclo operativo del
robot. El grupo de parcializacin del rea de trabajo eje 1 permite sectorizar, en modo
elctrico, hasta 2 reas de trabajo, cada una controlada por dos microinterruptores de
seguridad, conformemente a las ms restrictivas normas de seguridad.
El grupo est formado por:
un microinterruptor mltiple de 4 botones con conector INTERCONTEC,
una serie de levas plsticas que hay que cortar en la longitud requerida por la
aplicacin.
Las levas deben ser insertadas y bloqueadas en los portalevas fijados en el robot
mediante los correspondientes soportes. Con el equipo se entrega el conector volante
para permitir la conexin hacia el exterior.
El kit comprende:
1 conector INTERCONTEC 19 polos, tipo ASDA279FR92590035000;
3 contactos hembra de 1,5 mm a engastar, para cables de 17 AWG;
16 contactos hembra de 1 mm a engastar, para cables de 17 AWG;
1 sujetacable para cables de 14 mm2 a 17 mm2.
Para engastar los pin hembra en cables de 17 AWG se aconseja utilizar el "crimping
tool" seccin mediana de INTERCONTEC o equivalente.
Para el esquema elctrico interno del grupo microinterruptor, hgase referencia
al Circuit Diagram del robot.
8-8
mc-rc-NM_16-spt_05.FM
01/1006
Opciones
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
mc-rc-NM_16-spt_05.FM
01/1006
Porta-levas der. de 4 pistas
Porta-levas izq. de 4 pistas
Placa
Leva
Micro switch de 4 rodillos
Tornillo Allen de cabeza cilndrica cabeza rebajada M6x10 (8.8)
Tornillo Allen de cabeza cilndrica M6 x 16-8.9
Clavija cilndrica D 4X20
Tornillo Allen de cabeza cilndrica M6 x 20
Tornillo Allen de cabeza cilndrica M6x8
Tuerca hexagonal baja M6
8-9
Opciones
Tab. 8.2 - Caractersticas elctricas del grupo de parcializacin
del rea de trabajo eje 1
DATOS ELCTRICOS
8-10
Tipo switch
BSE 85 para DIN EN 60204-1
Aislamiento
Grupo C (VDE 0110)
Tensin mxima
50 Vac
Corriente mxima
2A
Carga mnima
Resistencia de contacto
20 mA
< 40 m
Corriente de interrupcin
2 A, cos =0,8
mc-rc-NM_16-spt_05.FM
01/1006
Opciones
8.6 Grupo placa nivelable (cdigo 82212700)
8.6.1
Descripcin
El grupo placa nivelable para la fijacin del robot permite fijar correctamente el robot al
piso; este grupo permite satisfacer los siguientes requisitos:
garantizar una buena planaridad de la superficie de apoyo, de manera tal que no
se creen esfuerzos anmalos sobre la estructura de la base del robot.
tener la posibilidad de montar el robot "en horizontal" para facilitar las aplicaciones
de "off-line programming"
El grupo est formado por:
cuatro placas en acero que hay que fijar al piso mediante anclajes de tipo qumico
(por un total de 16 anclajes no incluidos en el suministro).
una placa nivelable a soldar en las placas mencionadas tras haber alcanzado la
condicin de nivelacin ptima del robot actuando sobre los correspondientes
tornillos de nivelacin.
Leyenda 8.6 Grupo placa nivelable (cdigo 82212700)
1.
2.
3.
4.
5.
mc-rc-NM_16-spt_05.FM
01/1006
Placa nivelable (cant. =1)
Placa (cant. = 4)
Rgulo (cant. = 8)
Tornillo CABEZA HEXAGONAL TOTALMENTE ROSCADO M20x100-CL 8.8 (cant. = 4)
Tuerca hexagonal M20 -8 FE/ZN 12 (cant. = 4)
8-11
Opciones
8-12
mc-rc-NM_16-spt_05.FM
01/1006
Opciones
8.7 Kit para calibracin manual
SMART NM-NM off set (cdigo 82212400)
1.
2.
8.7.1
SMART NM 16 3.1 (cdigo 82282100)
Dispositivo portacomparador
Soporte para el dispositivo portacomparador en los ejes 5-6
Descripcin
El kit para la calibracin manual est formado por las siguientes piezas:
un til portacomparador (1) que hay que atornillar en los asientos obtenidos en los
ejes 1-2-3-4;
un soporte (2) para el til portacomparador (1) que hay que atornillar en los
asientos obtenidos en los ejes 5-6.
Para el empleo del kit es necesario disponer de un comparador centesimal que debe
ser atornillado sobre la herramienta (1).
El kit se utiliza para buscar la posicin de calibracin correspondiente a la posicin de
lectura mnima efectuada sobre el comparador, haciendo referencia a los ndices
predispuestos en cada uno de los ejes del robot.
mc-rc-NM_16-spt_05.FM
01/1006
8-13
Opciones
Tab. 8.3 - Ejemplo de empleo del kit para la calibracin del eje 1
Extraccin de las protecciones (A y B)
de los planos de referencia para la
calibracin
Alineacin visual de los planos de
referencia para la calibracin (C) y
montaje del til portacomparador (D).
Bsqueda del punto de calibracin del
eje.
8-14
mc-rc-NM_16-spt_05.FM
01/1006
Opciones
Tab. 8.4 - Ejemplo de empleo del kit para la calibracin del eje 5
a.
Alineacin visiva de los planos de SMART NM
referencia para la calibracin, el
montaje del til portacomparador y
del comparador.
b.
Bsqueda del punto de calibracin
del eje 5
SMART NM 16-3.1
Tab. 8.5 - Ejemplo de empleo del kit para la calibracin del eje 6
a.
Alineacin visiva de los planos de SMART NM
referencia para la calibracin, el
montaje del til portacomparador y
del comparador.
b.
Bsqueda del punto de calibracin
del eje 6.
SMART NM 16 3.1
mc-rc-NM_16-spt_05.FM
01/1006
8-15
Opciones
8.8 Grupo til calibrado (cdigo 81783801
8.8.1
SMART NM)
1.
8-16
til calibrado
mc-rc-NM_16-spt_05.FM
01/1006
Opciones
8.8.2
SMART NM off set
(1)
1.
mc-rc-NM_16-spt_05.FM
01/1006
til calibrado
8-17
Opciones
8.8.3
SMART NM 16-3.1
til calibrado (cdigo 81783801)
8.8.4
Descripcin
El grupo til calibrado se utiliza para el clculo del TCP (Tool Center Point) relativo a la
brida del robot.
El grupo est formado por una barra cilndrica de longitud definida de manera tal que el
extremo resulte posicionado en un punto preciso respecto al centro del pulso.
Dicha barra se atornilla directamente en la brida de salida del eje 6 en posicin radial a
la misma y no necesita que se desmonte el dispositivo eventualmente instalado en la
brida.
8-18
mc-rc-NM_16-spt_05.FM
01/1006
Opciones
8.9 Grupo plataforma elevadora de horquillas
(cdigo 82212600)
8.9.1
Descripcin
El grupo plataforma elevadora de horquillas es una opcin indispensable para la
elevacin del robot mediante el carro elevador. La toma del carro es posible tanto
posteriormente como lateralmente respecto al robot.
El grupo est formado por una estructura soldada elctricamente en perfiles de acero
rectangular que hay que fijar al robot mediante tornillos.
mc-rc-NM_16-spt_05.FM
01/1006
8-19
Opciones
8.10 Grupo proteccin de las conexiones de
clasificacin (marchable cdigo 82284200)
8.10.1
Descripcin
El grupo est formado por un robusto reparo en chapa que se fija en la base del robot
para proteger todos los conectores enlazados al grupo de clasificacin del robot.
8.11 Unidad tornillos y clavijas para la fijacin del
robot (cdigo 82211900)
8.11.1
Descripcin
La unidad comprende los tornillos y clavijas que son necesarios para la fijacin del robot
a la placa de acero de base del robot.
Para ulteriores informaciones, vase el Cap.7. - Predisposiciones para la Instalacin del
Robot
8-20
mc-rc-NM_16-spt_05.FM
01/1006
Opciones
1.
2.
3.
4.
5.
6.
7.
mc-rc-NM_16-spt_05.FM
01/1006
Centraje = 30 mm L = 80 mm (cant. = 1)
Centraje = 30 mm L = 60 mm (cant. = 1)
Tornillo Allen de cabeza cilndrica M 10 x 90 (8.8) (cant. = 1)
Tornillo Allen de cabeza cilndrica M 10 x 70 (8.8) (cant. = 1)
Tornillo de cabeza hexagonal parcialmente roscada M 20 x 80 (8.8.) (cant. = 4)
Arandela elstica Grower = 20mm (cant. = 4)
Arandela plana = 20 mm (cant. = 4)
8-21
COMAU Robotics services
Repair: repairs.robotics@comau.com
Training: training.robotics@comau.com
Spare parts: spares.robotics@comau.com
Technical service: service.robotics@comau.com
comau.com/robotics
Vous aimerez peut-être aussi
- KST ServoGun Basic 10 EsDocument218 pagesKST ServoGun Basic 10 EsAdrien Bref100% (2)
- KST RSI 40 EsDocument120 pagesKST RSI 40 EsLuisito Miguelito ErazoPas encore d'évaluation
- Programacion Avanzada Dx200 Ver.2.0 (23!05!17)Document203 pagesProgramacion Avanzada Dx200 Ver.2.0 (23!05!17)Carlos Peregrina100% (1)
- Practicas YaskawaDocument202 pagesPracticas YaskawacegoglzPas encore d'évaluation
- KR c4 Ethercat Kss Vss 82-83-84 EsDocument39 pagesKR c4 Ethercat Kss Vss 82-83-84 EskolosuxPas encore d'évaluation
- Manual Operación - KRC4 CompactDocument137 pagesManual Operación - KRC4 Compactsergio acuñaPas encore d'évaluation
- LenguajeKRL KC2 PDFDocument202 pagesLenguajeKRL KC2 PDFaldelroPas encore d'évaluation
- Manual Robot KukaDocument404 pagesManual Robot Kukajavier jassoPas encore d'évaluation
- KST ServoGun FC 21 EsDocument131 pagesKST ServoGun FC 21 EsOmarCabrera100% (2)
- Curso Básico de Robots Comau (Revision3.0)Document155 pagesCurso Básico de Robots Comau (Revision3.0)chuchin_p280% (5)
- Prog Configuracion r41 EsDocument127 pagesProg Configuracion r41 EsiagomouPas encore d'évaluation
- Descripcion General de RAPIDDocument214 pagesDescripcion General de RAPIDEduardo LealPas encore d'évaluation
- Safety KR C5 With KSS VSS EsDocument44 pagesSafety KR C5 With KSS VSS EsemersonPas encore d'évaluation
- KST WorkVisual 3.1 EsDocument185 pagesKST WorkVisual 3.1 EsRichie Aceves100% (2)
- KST GripperSpotTech 40 EsDocument73 pagesKST GripperSpotTech 40 EsemersonPas encore d'évaluation
- Alarmas DX200Document1 204 pagesAlarmas DX200emmanuel baezPas encore d'évaluation
- KST GlueTech 42 deDocument71 pagesKST GlueTech 42 deOscar Jiménez gil100% (1)
- MotoTraining PDFDocument12 pagesMotoTraining PDF22pinkPas encore d'évaluation
- Flexpendant Abb PDFDocument366 pagesFlexpendant Abb PDFOmar RamosPas encore d'évaluation
- KRC 2 - Instalación Software V 4.1Document75 pagesKRC 2 - Instalación Software V 4.1Oscar Vazquez EspinosaPas encore d'évaluation
- KRC4 - Instrucciones de ServicioDocument227 pagesKRC4 - Instrucciones de ServicioYogui72Pas encore d'évaluation
- VSS 87 END EsDocument370 pagesVSS 87 END EsDayron Rodríguez DíazPas encore d'évaluation
- KSS 85 END Es PDFDocument347 pagesKSS 85 END Es PDFGerman David Grisales OsorioPas encore d'évaluation
- KST WorkVisual EsDocument169 pagesKST WorkVisual EsEberPerez100% (2)
- 31 AdvancedProgrammingNX100Document152 pages31 AdvancedProgrammingNX100Abraham SegundoPas encore d'évaluation
- Manual para Integradores PDFDocument521 pagesManual para Integradores PDFROBOTICA PRODISMOPas encore d'évaluation
- KST WorkVisual 60 EsDocument268 pagesKST WorkVisual 60 EsSanti PuyoPas encore d'évaluation
- MA KR C5 Micro EsDocument154 pagesMA KR C5 Micro EsByron Xavier Lima CedilloPas encore d'évaluation
- Manuel Software KUKA SIMDocument55 pagesManuel Software KUKA SIMsergio acuñaPas encore d'évaluation
- Ba KR 60 l45 Jet EsDocument201 pagesBa KR 60 l45 Jet EsNicolas Romero100% (1)
- Manual IRB1600Document420 pagesManual IRB1600AquilesPas encore d'évaluation
- Programacion de Robots KukaDocument255 pagesProgramacion de Robots KukaJose Ortiz MerinoPas encore d'évaluation
- ABB - 3HAC047136 PM IRC5-es PDFDocument348 pagesABB - 3HAC047136 PM IRC5-es PDFantonioPas encore d'évaluation
- KSS 83 SI EsDocument517 pagesKSS 83 SI EsKevin MirandaPas encore d'évaluation
- B-80687SP - 10 Safety Manual PDFDocument40 pagesB-80687SP - 10 Safety Manual PDFJosé Angel NoguezPas encore d'évaluation
- 00c94250-000a-11e6-ad59-6cae8b4eb554Document115 pages00c94250-000a-11e6-ad59-6cae8b4eb554filojsPas encore d'évaluation
- Smart PTDO. Manual de Instrucciones.Document124 pagesSmart PTDO. Manual de Instrucciones.Rait100% (1)
- M GX Works2 A Es XXXXXXDocument110 pagesM GX Works2 A Es XXXXXXgersain arandaPas encore d'évaluation
- 3HAC16590-es RevW MO IRC5 Con Flexpendant PDFDocument412 pages3HAC16590-es RevW MO IRC5 Con Flexpendant PDFjoacerPas encore d'évaluation
- Manual de Instalacion Robot KawasakiDocument18 pagesManual de Instalacion Robot Kawasakiadriana zelayaPas encore d'évaluation
- Fanuc Manual de MantenimientoDocument5 pagesFanuc Manual de MantenimientoPedro Delgado0% (1)
- Fanuc MAROIST6406041ES - REV - B - SpotTool+Document2 066 pagesFanuc MAROIST6406041ES - REV - B - SpotTool+pacho_1100% (3)
- Curso de Programación A y B para RJ3iC (Ver 2) PDFDocument235 pagesCurso de Programación A y B para RJ3iC (Ver 2) PDFMarco ZetecKrone Rap SoloPas encore d'évaluation
- Ladder MotomanDocument9 pagesLadder MotomanDaniel GarciaPas encore d'évaluation
- Kuka System Software Krc4 Kss 8.2Document209 pagesKuka System Software Krc4 Kss 8.2daniel100% (2)
- Moto Man Robot KukaDocument62 pagesMoto Man Robot KukaMarco VargasPas encore d'évaluation
- Rapid Abb EspañolDocument927 pagesRapid Abb EspañolJosePas encore d'évaluation
- Curso Robots MotomanDocument36 pagesCurso Robots MotomanJose Luis Ivánovich100% (2)
- Fundamentos de Robótica FANUC 1Document9 pagesFundamentos de Robótica FANUC 1elpatotas22Pas encore d'évaluation
- Kinetix 350 - Es-P PDFDocument156 pagesKinetix 350 - Es-P PDFSergio Pretell Villa100% (1)
- Robóticaaa Programación FANUCDocument186 pagesRobóticaaa Programación FANUCPepe CastilloPas encore d'évaluation
- Vision 2D Configuración Básica (Calibracaión + Proceso de Visión)Document16 pagesVision 2D Configuración Básica (Calibracaión + Proceso de Visión)adrianbescosPas encore d'évaluation
- PDF Kuka Programming 1 DLDocument311 pagesPDF Kuka Programming 1 DLMisael VideaPas encore d'évaluation
- Apendice r41 EsDocument177 pagesApendice r41 Esiagomou100% (2)
- Variables de Systema - EsDocument204 pagesVariables de Systema - EsiagomouPas encore d'évaluation
- Liebert GXT3 UPS (230V) 700VA-3000VA User Manual (Spanish)Document46 pagesLiebert GXT3 UPS (230V) 700VA-3000VA User Manual (Spanish)Juan Carlos67% (3)
- Microbeast 1.0.0 EspDocument56 pagesMicrobeast 1.0.0 EspJRM STYLEPas encore d'évaluation
- Kollmorgen S600 Servo Drive Manual Del Producto S601-620 EsDocument122 pagesKollmorgen S600 Servo Drive Manual Del Producto S601-620 Esdarinel88Pas encore d'évaluation
- Manual de Usuario Sepam 10 PDFDocument270 pagesManual de Usuario Sepam 10 PDFhucres2Pas encore d'évaluation
- Manual de Uso y Mantenimiento - HORNO SMIPACK BP802ASDocument114 pagesManual de Uso y Mantenimiento - HORNO SMIPACK BP802ASVictor Augusto Banda Teran40% (5)
- Actividad Sumativa #2.Document2 pagesActividad Sumativa #2.Marilen RiosPas encore d'évaluation
- 253T20150079 PDFDocument141 pages253T20150079 PDFJohanita CoraLi Velasque OroscoPas encore d'évaluation
- Texto 8 - José Rubiel-Planeación de Mercadotecnia y PublicidadDocument16 pagesTexto 8 - José Rubiel-Planeación de Mercadotecnia y Publicidadrubiel0% (1)
- CURRICULUM VITAE (Maria Luz Vargas Hilari)Document7 pagesCURRICULUM VITAE (Maria Luz Vargas Hilari)lucesitav700100% (2)
- Cableado EsructuradoDocument20 pagesCableado EsructuradoAlejandro Garcia StaceyPas encore d'évaluation
- Sintesis de La Unidad III Diseño y Analisis de Propuestas de Investigacion.Document5 pagesSintesis de La Unidad III Diseño y Analisis de Propuestas de Investigacion.Ronald CaviPas encore d'évaluation
- Informe de Extencion RuralDocument6 pagesInforme de Extencion RuralEVELYN NIEVESPas encore d'évaluation
- MathCad Prime en La Ingenieria PDFDocument15 pagesMathCad Prime en La Ingenieria PDFJuan S. Ordoñez MirandaPas encore d'évaluation
- SyllabusDocument7 pagesSyllabusFernando ArmijosPas encore d'évaluation
- Construccion de MueblesDocument24 pagesConstruccion de MueblesKike LLiguin CastroPas encore d'évaluation
- Vocabulario Ingles Tecnico UhDocument7 pagesVocabulario Ingles Tecnico UhJuan Carlos RomeroPas encore d'évaluation
- La Respuesta Natural de Un Circuito RL (Artículo) - Khan AcademyDocument24 pagesLa Respuesta Natural de Un Circuito RL (Artículo) - Khan AcademyPinel GustavoPas encore d'évaluation
- Notas de ConcretoDocument2 pagesNotas de Concretojs_ciPas encore d'évaluation
- Operar MotoniveladoraDocument6 pagesOperar MotoniveladoraWilman3350% (2)
- Desmontar Arrancador - FMCDocument2 pagesDesmontar Arrancador - FMCLHBarriosPas encore d'évaluation
- ObjetivosDocument7 pagesObjetivosJefry VillegasPas encore d'évaluation
- Cascarilla de ArrozDocument22 pagesCascarilla de ArrozFelipe Granados100% (1)
- 430-22 Un Solo Motor PDFDocument1 page430-22 Un Solo Motor PDFAlex Ferrer100% (1)
- Laboratorio Nº3Document4 pagesLaboratorio Nº3Felipe Canales100% (1)
- Clasificación de Las Fuentes Móviles PesqueraDocument11 pagesClasificación de Las Fuentes Móviles PesqueraFiorella Vanessa Chavez TitoPas encore d'évaluation
- Ley de GrashofDocument12 pagesLey de GrashofWalter HerreraPas encore d'évaluation
- Specification Curvo 300C ESDocument2 pagesSpecification Curvo 300C ESAnonymous mM1BZ9AWZ7Pas encore d'évaluation
- Mecanico de Equipo Liviano y MedianoDocument4 pagesMecanico de Equipo Liviano y MedianoCarlos Enrrique Yabur RiosPas encore d'évaluation
- Caso LinkedinDocument10 pagesCaso LinkedinMiguel GuillermoPas encore d'évaluation
- SDS Alcohol Etilico Al 70% Nuevo ReinoDocument6 pagesSDS Alcohol Etilico Al 70% Nuevo ReinocrplateroPas encore d'évaluation
- Preparación para La Colocación Del ConcretoDocument3 pagesPreparación para La Colocación Del ConcretoRolandAvilaJulcaPas encore d'évaluation
- Grandes Ensambles en Autodesk InventorDocument10 pagesGrandes Ensambles en Autodesk InventorJhonathan Pizarro ChoquePas encore d'évaluation
- Guia de Ejercicios P&idsDocument2 pagesGuia de Ejercicios P&idsmancolmoPas encore d'évaluation
- MineralurgiaDocument8 pagesMineralurgiaAndrei Blas Azaña0% (2)
- 02-Hasta Bomba de AguaDocument19 pages02-Hasta Bomba de AguaDiego Nunes100% (1)