Vous aimerez peut-être aussi
- Manual - Zelio SoftDocument16 pagesManual - Zelio SoftAlejandro Sánchez100% (1)
- Prácticas Automatizacion Industrial PDFDocument42 pagesPrácticas Automatizacion Industrial PDFTomas LosadaPas encore d'évaluation
- Programar LOGO Siemens con puertas lógicasDocument5 pagesProgramar LOGO Siemens con puertas lógicasjosePas encore d'évaluation
- Programacion Basica Del PLCDocument14 pagesProgramacion Basica Del PLCBrian Ubillús RodríguezPas encore d'évaluation
- Trabajo Practico de Automatizacion IndustrialDocument22 pagesTrabajo Practico de Automatizacion IndustrialFreddy Espejo100% (1)
- Siemens PLC LogoDocument26 pagesSiemens PLC LogoDouglas SotezPas encore d'évaluation
- Guía circuitos electroneumáticos sensores proximidadDocument7 pagesGuía circuitos electroneumáticos sensores proximidadErick CollazosPas encore d'évaluation
- Principios de La AutomatizaciónDocument18 pagesPrincipios de La AutomatizaciónFabian PobletPas encore d'évaluation
- Trabajofinal Lopez Davila.Document17 pagesTrabajofinal Lopez Davila.Anthony CauperPas encore d'évaluation
- Arrancadores Suaves PDFDocument22 pagesArrancadores Suaves PDFLaucian NaskapiPas encore d'évaluation
- PLC Logo v8.2Document4 pagesPLC Logo v8.2Luis MizqueroPas encore d'évaluation
- InfoPLC Net S7 1200 Paso A Paso v1.0Document24 pagesInfoPLC Net S7 1200 Paso A Paso v1.0jcsoblecPas encore d'évaluation
- EjerciciosDocument6 pagesEjerciciosFrancisco de Paula González Rodríguez0% (1)
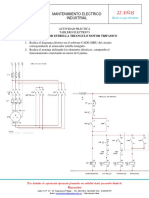
- Arranque Estrella TrianguloDocument2 pagesArranque Estrella TrianguloDavid VargasPas encore d'évaluation
- Laboratorio Nº3Document15 pagesLaboratorio Nº3AndreaFabiolaParedesGomez50% (2)
- infoPLC Net Guia 3 Instrucciones Basicas en Los Automatas ProgramablesDocument19 pagesinfoPLC Net Guia 3 Instrucciones Basicas en Los Automatas Programablesfuente perezPas encore d'évaluation
- SEMANA 12 - Programación Del PLC. Direccionamiento Absoluto, Simbólico (Autoguardado)Document8 pagesSEMANA 12 - Programación Del PLC. Direccionamiento Absoluto, Simbólico (Autoguardado)Edgar Verano GonzalesPas encore d'évaluation
- Acondicionadores de Señal PDFDocument58 pagesAcondicionadores de Señal PDFSthefaniia Garzon OliiverosPas encore d'évaluation
- Practica 1Document36 pagesPractica 1ari_canPas encore d'évaluation
- 8A - 1919 - PLC - Examen FinalDocument5 pages8A - 1919 - PLC - Examen FinalJorge BustosPas encore d'évaluation
- Programación de PLC LOGO! en FUP y contactosDocument15 pagesProgramación de PLC LOGO! en FUP y contactosMarcelo PereiraPas encore d'évaluation
- Diagramas en Escalera de Un PLCDocument8 pagesDiagramas en Escalera de Un PLCPrajedis De La Fuente AlvarezPas encore d'évaluation
- Guia Control y Comando 4t0 Medio Modulo A.S.E.I.Document15 pagesGuia Control y Comando 4t0 Medio Modulo A.S.E.I.Camilo VelandiaPas encore d'évaluation
- Programación PLC S7-1200Document17 pagesProgramación PLC S7-1200luanague100% (2)
- Programación de procesos secuencialesDocument25 pagesProgramación de procesos secuencialesChamo Pobre BatracioPas encore d'évaluation
- Robotica Industrial - Informe de LaboratorioDocument11 pagesRobotica Industrial - Informe de LaboratorioLuis NuelaPas encore d'évaluation
- Reporte de Proyectos de PLC Cade PDFDocument10 pagesReporte de Proyectos de PLC Cade PDFISABEL SANDOVAL OLGUINPas encore d'évaluation
- Clase 15Document4 pagesClase 15Divar CamposPas encore d'évaluation
- Proyecto Automatizacion IndustrialDocument42 pagesProyecto Automatizacion IndustrialEDUGAMPas encore d'évaluation
- Guia de Laboratorio. PLC LogoDocument4 pagesGuia de Laboratorio. PLC LogoLuis LaraPas encore d'évaluation
- Transistor 2N2222 Como Interruptor Arduino UNO - HeTProDocument13 pagesTransistor 2N2222 Como Interruptor Arduino UNO - HeTProv.canola seracis100% (1)
- Sistema automatizado de pinturaDocument213 pagesSistema automatizado de pinturaenfrecuencia100% (1)
- Ejer Cici OsDocument11 pagesEjer Cici OsAlfredo RoblesPas encore d'évaluation
- Didactic Katalog 02-03 EsDocument269 pagesDidactic Katalog 02-03 EsJhon MartinezPas encore d'évaluation
- Manual de Prácticas de ElectroneumáticaDocument51 pagesManual de Prácticas de ElectroneumáticaViviPas encore d'évaluation
- Ejercicio ElectroneumaticaDocument9 pagesEjercicio Electroneumaticarobert_cruz_54Pas encore d'évaluation
- MANUAL de PRACTICAS Interpretacion de Parametros Basicos de ElectronicaDocument38 pagesMANUAL de PRACTICAS Interpretacion de Parametros Basicos de ElectronicaramkofPas encore d'évaluation
- Curso de PLC Twido Basico 5ta ParteDocument83 pagesCurso de PLC Twido Basico 5ta ParteCristhian Peña CastilloPas encore d'évaluation
- ElectroneumáticaDocument19 pagesElectroneumáticaBenavides NestorPas encore d'évaluation
- Clase 5 Subrutinas - AM PDFDocument22 pagesClase 5 Subrutinas - AM PDFTicona Juanes IlderPas encore d'évaluation
- Electroneumatica BasicaDocument25 pagesElectroneumatica BasicaJesús EHPas encore d'évaluation
- Manual Básico de Programación en Labview Por MasterhacksDocument84 pagesManual Básico de Programación en Labview Por Masterhacksjonathan_calixto_4Pas encore d'évaluation
- Lenguaje LadderDocument51 pagesLenguaje LadderJosue ColinPas encore d'évaluation
- Ejercicios LadderDocument3 pagesEjercicios LadderXavier Yael0% (1)
- AUTOMATIZACION INSDRIAL (Monográfia)Document27 pagesAUTOMATIZACION INSDRIAL (Monográfia)Alexis Gutierres OrozcoPas encore d'évaluation
- Guia Practica 3 S7-1200 VirtualDocument3 pagesGuia Practica 3 S7-1200 VirtualErwin RojasPas encore d'évaluation
- Ejericios Grafcet UPCO ICAIDocument2 pagesEjericios Grafcet UPCO ICAIJuan Sebastián Leguizamon ArchilaPas encore d'évaluation
- I-Manual Tallado Geometrico PDFDocument33 pagesI-Manual Tallado Geometrico PDFRolo RejalaPas encore d'évaluation
- PLC I - Micrologix - 2 PDFDocument61 pagesPLC I - Micrologix - 2 PDFRoberto Carlos Urquiola AyalaPas encore d'évaluation
- Práctica 6 Led RGB Interactivo Con PulsadoresDocument6 pagesPráctica 6 Led RGB Interactivo Con PulsadoresTranquilino Guzmán VázquezPas encore d'évaluation
- Proyecto DomoticaDocument281 pagesProyecto DomoticaanubayahPas encore d'évaluation
- Partidores Suaves y Variadores de FrecuenciaDocument23 pagesPartidores Suaves y Variadores de FrecuenciaAbel Tavara Cieza0% (1)
- Actividad Lazos Comunes de ControlDocument3 pagesActividad Lazos Comunes de ControlUlfer Flores100% (1)
- Práctica Programación LadderDocument16 pagesPráctica Programación LadderJhonny EspinoPas encore d'évaluation
- Lab 03Document14 pagesLab 03angel reyesPas encore d'évaluation
- Guia 1 - PLC ZelioDocument22 pagesGuia 1 - PLC ZelioAna Rocio Cruz Ramirez100% (1)
- Ab S7 NaisDocument29 pagesAb S7 NaisHENRY HERNAN SALINAS CASTAÑEDAPas encore d'évaluation
- S7 Con TIA POrtalDocument29 pagesS7 Con TIA POrtalHenry Rios100% (1)
- Transformada Inversa de Laplace - ZavaletaPedroDocument22 pagesTransformada Inversa de Laplace - ZavaletaPedroPedro Fabrizio Zavaleta MatíasPas encore d'évaluation
- ELT 3992 AUTOMATICA II LABORATORIO No. 5 PANEL VIEW COMPONENT HMI C600Document18 pagesELT 3992 AUTOMATICA II LABORATORIO No. 5 PANEL VIEW COMPONENT HMI C600Grover Oswaldo Villarpando CallePas encore d'évaluation
- TLC Perú TurquiaDocument1 pageTLC Perú TurquiaJorge Junior Cisneros VargasPas encore d'évaluation
- Servicio de DeudaDocument14 pagesServicio de DeudaJorge Junior Cisneros VargasPas encore d'évaluation
- Preguntas BCRPDocument1 pagePreguntas BCRPJorge Junior Cisneros VargasPas encore d'évaluation
- Foto MarketingDocument1 pageFoto MarketingJorge Junior Cisneros VargasPas encore d'évaluation
- Fibra OpticaDocument1 pageFibra OpticaJorge Junior Cisneros VargasPas encore d'évaluation
- Peps DISCIPLINA FIFODocument4 pagesPeps DISCIPLINA FIFOJorge Junior Cisneros VargasPas encore d'évaluation
- Controladores PIDDocument1 pageControladores PIDJorge Junior Cisneros VargasPas encore d'évaluation
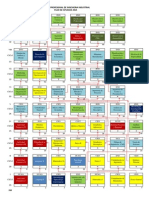
- Plan de Estudios 2015Document2 pagesPlan de Estudios 2015Jorge Junior Cisneros VargasPas encore d'évaluation
- Pruebas EstadisticasDocument4 pagesPruebas EstadisticasJorge Junior Cisneros VargasPas encore d'évaluation
- USUARIODocument2 pagesUSUARIOJorge Junior Cisneros VargasPas encore d'évaluation
- Metodologia TI Promedio PDFDocument7 pagesMetodologia TI Promedio PDFJaime Jair RottweilasPas encore d'évaluation
- Trabajo de Simulación-7y8Document3 pagesTrabajo de Simulación-7y8Jorge Junior Cisneros VargasPas encore d'évaluation
- Informe FinanzasDocument11 pagesInforme FinanzasJorge Junior Cisneros VargasPas encore d'évaluation
- 5 Intro Six SigmaDocument10 pages5 Intro Six SigmaJorge Junior Cisneros VargasPas encore d'évaluation
- Finanzas Empresariales II: Análisis Estados Financieros Grupo 03Document7 pagesFinanzas Empresariales II: Análisis Estados Financieros Grupo 03Jorge Junior Cisneros VargasPas encore d'évaluation
- Tutorial Enterprise Architect 75Document20 pagesTutorial Enterprise Architect 75Juan Lopez PovedaPas encore d'évaluation
- 2 Conjuntos IIDocument5 pages2 Conjuntos IIJorge Junior Cisneros VargasPas encore d'évaluation
- 5 Intro Six SigmaDocument10 pages5 Intro Six SigmaJorge Junior Cisneros VargasPas encore d'évaluation
- Semana 09Document104 pagesSemana 09Jorge Junior Cisneros VargasPas encore d'évaluation
- GRUPALDocument4 pagesGRUPALJorge Junior Cisneros VargasPas encore d'évaluation
- Modulo Maestria2014Document113 pagesModulo Maestria2014Jorge Junior Cisneros VargasPas encore d'évaluation
- Mux2a1 Con VHDLDocument15 pagesMux2a1 Con VHDLYarit RicardezPas encore d'évaluation
- Certificado de Calidad NAZCA TUB 6010 3.25mmDocument1 pageCertificado de Calidad NAZCA TUB 6010 3.25mmProspero Martin Payahuanca MamaniPas encore d'évaluation
- Tecnicas de RadioinmunoensayoDocument61 pagesTecnicas de RadioinmunoensayoDeysi Del CarpioPas encore d'évaluation
- Polinomios Ruffini Teorema Fracciones 4oESODocument6 pagesPolinomios Ruffini Teorema Fracciones 4oESONathalie Jimenez RamosPas encore d'évaluation
- Ley de FourierDocument105 pagesLey de FourierLucero MamaniPas encore d'évaluation
- Ferromagnetismo, Ferrimagnetismo y SuperparamagnetismoDocument15 pagesFerromagnetismo, Ferrimagnetismo y SuperparamagnetismoJeysa Paola Colque AtahuichiPas encore d'évaluation
- Hoja de Procesos Taller y Tecnologia Iii TTMDocument5 pagesHoja de Procesos Taller y Tecnologia Iii TTMVyco Crow CrawPas encore d'évaluation
- Clase 11 TM ElectroforesisDocument64 pagesClase 11 TM Electroforesis05-TL-HU-KARINA SUSAN CARLOS PEREZPas encore d'évaluation
- 11-Compresores para Frenos de AireDocument22 pages11-Compresores para Frenos de AireLuigui Lopez LlancaPas encore d'évaluation
- Aparatos ComercialesDocument26 pagesAparatos ComercialesNiche ChavezPas encore d'évaluation
- Reporte de OPAMPDocument52 pagesReporte de OPAMPTako AlanPas encore d'évaluation
- Taller 6 GeometríaDocument5 pagesTaller 6 GeometríaSebastian Tabares GarciaPas encore d'évaluation
- Dinámica de Desarrollo Del Rendimiento Matemático Desde Preescolar Hasta Segundo GradoDocument15 pagesDinámica de Desarrollo Del Rendimiento Matemático Desde Preescolar Hasta Segundo GradoCamila Jorquera CatalánPas encore d'évaluation
- Columna Corta y Columna LargaDocument6 pagesColumna Corta y Columna LargaMFrank Herntz100% (1)
- 17-Taller Pre-Parcial 02 FJ2021Document1 page17-Taller Pre-Parcial 02 FJ2021EMMANUEL ACEVEDO HENAOPas encore d'évaluation
- Reduccion Conduit Nema 7 Tipo SXBDocument7 pagesReduccion Conduit Nema 7 Tipo SXBJhon SanabriaPas encore d'évaluation
- Población y MuestraDocument8 pagesPoblación y MuestraJosé NavarroPas encore d'évaluation
- MarcoDocument6 pagesMarcoBriiznaa VtPas encore d'évaluation
- FreeRTOS STM32Document29 pagesFreeRTOS STM32MatheusPas encore d'évaluation
- Plan Anual MatematicasDocument11 pagesPlan Anual MatematicasSergio E VallesPas encore d'évaluation
- Laboratorio 4 Determinacion de ViscosidadDocument8 pagesLaboratorio 4 Determinacion de Viscosidadolger frisancho chuquicallataPas encore d'évaluation
- Cañón electroquimico DIYDocument2 pagesCañón electroquimico DIYclonqfb50% (4)
- Evolución del coeficiente de arrastre y área frontal en el MustangDocument10 pagesEvolución del coeficiente de arrastre y área frontal en el MustangKeto BAPas encore d'évaluation
- Introduccion A Los Materiales CompuestosDocument5 pagesIntroduccion A Los Materiales CompuestosMario Luna MezaPas encore d'évaluation
- SilaboDocument11 pagesSilaboCOLQUI CARUZ SALMA YADELEEPas encore d'évaluation
- Cuadro Comparativo Topología de RedesDocument3 pagesCuadro Comparativo Topología de RedesPepe Longjus Metin2 LongjuPas encore d'évaluation
- Distribución de PoissonDocument3 pagesDistribución de PoissonRamiro CurcioPas encore d'évaluation
- Mapa Conceptual de Los Paradigmas y Lenguajes de La Programación RepresentativaDocument1 pageMapa Conceptual de Los Paradigmas y Lenguajes de La Programación RepresentativaAlan yaer Esteban EstradaPas encore d'évaluation
- Evaluación 2Document6 pagesEvaluación 2ca muPas encore d'évaluation
- Mecanica de Fluidos en MineriaDocument34 pagesMecanica de Fluidos en Mineriaalex Palo Roman100% (1)