Vous aimerez peut-être aussi
- Elevator System Using MicrocontrollerDocument35 pagesElevator System Using MicrocontrollerMuthmain Yusof0% (3)
- Arduino Project Report (Smart Pedestrian Light)Document16 pagesArduino Project Report (Smart Pedestrian Light)Shaikhan Nadzemi100% (1)
- SM 1201r9 UsxrayDocument500 pagesSM 1201r9 UsxrayMurat KaanPas encore d'évaluation
- The Muslim Diary A Daily Guide To WorshipDocument55 pagesThe Muslim Diary A Daily Guide To WorshipMoeen Mirza100% (1)
- Human Motion Sensor Alarm SystemDocument30 pagesHuman Motion Sensor Alarm SystemAr Ar CuarioPas encore d'évaluation
- Power Electronics - MITDocument210 pagesPower Electronics - MITVasco RodriguesPas encore d'évaluation
- Mechanical Properties ExplainedDocument38 pagesMechanical Properties ExplainedJamaica VelascoPas encore d'évaluation
- Design and Construction of Security Door AlarmDocument30 pagesDesign and Construction of Security Door Alarmsanusi bello bakuraPas encore d'évaluation
- DIY Smart Home AutomationDocument16 pagesDIY Smart Home Automationmarius_danila8736100% (2)
- Fourth Monthly Exam T.L.E 7 S.Y. 2019 - 2020Document2 pagesFourth Monthly Exam T.L.E 7 S.Y. 2019 - 2020riela dhee lagramaPas encore d'évaluation
- Maintenance of SubstationDocument129 pagesMaintenance of Substationrama mohan100% (1)
- Mos RamDocument15 pagesMos RamDr. MNV KiranbabuPas encore d'évaluation
- Fire Fighting RobotDocument63 pagesFire Fighting Robotnafisa sultana0% (1)
- First Summative Test in Math 5 (First Quarter)Document1 pageFirst Summative Test in Math 5 (First Quarter)Marlene Tagavilla-Felipe Diculen100% (1)
- Automatic Sliding Door GuideDocument48 pagesAutomatic Sliding Door Guidetgkenny8734100% (1)
- Automatic pneumatic jack designDocument5 pagesAutomatic pneumatic jack designSaravanan ViswakarmaPas encore d'évaluation
- Automatic Room Lighting System Using MicrocontrollerDocument60 pagesAutomatic Room Lighting System Using MicrocontrollerKaren Faye TorrecampoPas encore d'évaluation
- Door Lock Security System Based On Face Image As A Key Using Image ProcessingDocument95 pagesDoor Lock Security System Based On Face Image As A Key Using Image ProcessingIsse Essi100% (1)
- v5n5p1 - Cisdiar JournalDocument15 pagesv5n5p1 - Cisdiar JournalKiet LePas encore d'évaluation
- Design and Development of an Automatic Sliding Gate OpenerDocument14 pagesDesign and Development of an Automatic Sliding Gate OpenerYhan SombilonPas encore d'évaluation
- Prototype ProjectDocument5 pagesPrototype ProjectJaweria BatoolPas encore d'évaluation
- Mpete ProgressDocument14 pagesMpete ProgressStampinusStephanoPas encore d'évaluation
- Arduino Automatic Door Opener Project ReportDocument9 pagesArduino Automatic Door Opener Project ReportShwiftyPas encore d'évaluation
- Automated Door with Face Recognition & SMS Alert Opens Securely on Facial MatchDocument16 pagesAutomated Door with Face Recognition & SMS Alert Opens Securely on Facial MatchMd. Ar-Rafi Bin Arif 190011123Pas encore d'évaluation
- Blueprint Example PDFDocument27 pagesBlueprint Example PDFMohamad Luqman HakimPas encore d'évaluation
- Integrated Mouse TrapDocument34 pagesIntegrated Mouse TrapRynefel Elopre100% (1)
- Microcontroller-Based Digital Code Lock for Enhanced SecurityDocument13 pagesMicrocontroller-Based Digital Code Lock for Enhanced SecurityHayu BayisaPas encore d'évaluation
- Automatic Dor ControleDocument39 pagesAutomatic Dor Controlegrum yigezuPas encore d'évaluation
- NIE INSTITUTE OF TECHNOLOGY AutomaticDocument16 pagesNIE INSTITUTE OF TECHNOLOGY AutomaticSuprithaPas encore d'évaluation
- Uitm Shah Alam Faculty of Mechanical EngineeringDocument27 pagesUitm Shah Alam Faculty of Mechanical EngineeringAhmadFikri DotMpeg40% (5)
- Modern Password Cracking Hands-On Approach Creating Optimised Versatile AttackDocument65 pagesModern Password Cracking Hands-On Approach Creating Optimised Versatile Attackeraser296Pas encore d'évaluation
- EIOT Mini Project Report - Rutumbara ChakorDocument17 pagesEIOT Mini Project Report - Rutumbara ChakorRutumbara Chakor100% (1)
- Design and Simulation of Loop-Based Bank Locker Security System by Using Microcontroller As Well As GSM ModuleDocument27 pagesDesign and Simulation of Loop-Based Bank Locker Security System by Using Microcontroller As Well As GSM ModuleUttam AcharyaPas encore d'évaluation
- Smart Home: An-Najah National University Faculty of EngineeringDocument27 pagesSmart Home: An-Najah National University Faculty of Engineeringمعتز بسام محمود مرداوي معتز بسام محمود مرداويPas encore d'évaluation
- Touchless Door BellDocument41 pagesTouchless Door BellShruti GuptaPas encore d'évaluation
- Automatic Gate ControllerDocument38 pagesAutomatic Gate Controlleratta.rakeshPas encore d'évaluation
- Porch Light Sensor SystemDocument6 pagesPorch Light Sensor SystemafiqqPas encore d'évaluation
- FamiDocument17 pagesFamiCherinet GashawPas encore d'évaluation
- Automatic Visitor Counter and Light SwitchingDocument57 pagesAutomatic Visitor Counter and Light SwitchingLea Jean ConsigoPas encore d'évaluation
- Fingerprint Door Lock Alert System Secures HomesDocument5 pagesFingerprint Door Lock Alert System Secures HomesKarlyn CalimponPas encore d'évaluation
- Microcontroller Based Electronic Password Door Lock: Wollega University, Iot, Ece DepartimentDocument13 pagesMicrocontroller Based Electronic Password Door Lock: Wollega University, Iot, Ece DepartimentHayu BayisaPas encore d'évaluation
- Project ReportDocument27 pagesProject ReportRao sakib AliPas encore d'évaluation
- Home Security Using Fingerprint Scanner and Keypad Lock With Sms NotificationDocument24 pagesHome Security Using Fingerprint Scanner and Keypad Lock With Sms NotificationBecca AzarconPas encore d'évaluation
- Simulation and Design Regarding The Four Walls Crossed Security System From The Intruders by The Use of Pic MicrocontrollerDocument25 pagesSimulation and Design Regarding The Four Walls Crossed Security System From The Intruders by The Use of Pic MicrocontrollerUttam AcharyaPas encore d'évaluation
- Automaticdooropener2022 ReportDocument29 pagesAutomaticdooropener2022 ReportAmeer Fiqri Bin Mohd Fakhrul AnuarPas encore d'évaluation
- Chapter One: Introduction: 1.0 BackgroundDocument42 pagesChapter One: Introduction: 1.0 BackgroundSulaiman Adebola BanirePas encore d'évaluation
- Home Automation Using Verilog ProjectDocument37 pagesHome Automation Using Verilog ProjectSri KaranPas encore d'évaluation
- THUYẾT MINH PBL3 (BẢN CUỐI)Document60 pagesTHUYẾT MINH PBL3 (BẢN CUỐI)Quân TrầnPas encore d'évaluation
- Mechatronic System Automated Window CurtDocument7 pagesMechatronic System Automated Window CurtAfif FikriPas encore d'évaluation
- JETIREY06114Document7 pagesJETIREY06114nibishimirwe abelPas encore d'évaluation
- Software Scope Documnet - V2Document12 pagesSoftware Scope Documnet - V2Hassan DanialPas encore d'évaluation
- ESE498 Intruder Detection System: Allen Chiang, Jonathan Chu, Siwei SuDocument26 pagesESE498 Intruder Detection System: Allen Chiang, Jonathan Chu, Siwei Suankita dhengalePas encore d'évaluation
- Major Srs DocumentationDocument14 pagesMajor Srs DocumentationBohtyar KhanPas encore d'évaluation
- Smart Home Using Particle Photon: A Report Submitted in Accordance With The Requirements ofDocument43 pagesSmart Home Using Particle Photon: A Report Submitted in Accordance With The Requirements ofHeba EngPas encore d'évaluation
- Smart Door SrsDocument18 pagesSmart Door SrsBohtyar KhanPas encore d'évaluation
- Ee-Motion Sensor Light Control SystemDocument48 pagesEe-Motion Sensor Light Control SystemDandy KelvinPas encore d'évaluation
- Cri 215 - 10THDocument34 pagesCri 215 - 10THThe WokPas encore d'évaluation
- Project Report TitleDocument54 pagesProject Report Title18X435 MadhuriPas encore d'évaluation
- Prison Information ThesisDocument82 pagesPrison Information Thesisshafiq urrehmanPas encore d'évaluation
- Digital Door Lock System OverviewDocument3 pagesDigital Door Lock System OverviewKettavan HillszPas encore d'évaluation
- Design and Construction of An Electronic Door Access Key: September 2018Document58 pagesDesign and Construction of An Electronic Door Access Key: September 2018mohammad ramdhanPas encore d'évaluation
- Saving Energy in HomeDocument7 pagesSaving Energy in HomeShubham PhadtarePas encore d'évaluation
- ChalaaaaaaaDocument68 pagesChalaaaaaaaKalya YbsufkadPas encore d'évaluation
- Door Lock SystemDocument8 pagesDoor Lock Systemkabindra karkiPas encore d'évaluation
- Automatic Curtain With LDRDocument2 pagesAutomatic Curtain With LDRMuhd RasydanPas encore d'évaluation
- Chapter One: 1.1backgrounds of The ProjectDocument52 pagesChapter One: 1.1backgrounds of The ProjectSamuel AdamuPas encore d'évaluation
- Integrated intruder alarm system detects intrusionsDocument38 pagesIntegrated intruder alarm system detects intrusionsAbiy FissheaPas encore d'évaluation
- Group 1 Object Oriented System Analysis Design ProjectDocument51 pagesGroup 1 Object Oriented System Analysis Design Projectseyfe100% (2)
- Saim Chishti - Mushkil Kusha - Volume 01Document1 011 pagesSaim Chishti - Mushkil Kusha - Volume 01Yasin Haider NaqviPas encore d'évaluation
- Mohammad Ur Rasulullah 1 - UrduDocument90 pagesMohammad Ur Rasulullah 1 - UrdumnfthoughtsPas encore d'évaluation
- Kitne Bade Hain Hausle Parwardegar KeDocument40 pagesKitne Bade Hain Hausle Parwardegar KeMUZAMMIL AHMED KHANPas encore d'évaluation
- Quality Tools & TechniquesDocument31 pagesQuality Tools & TechniquesHayyaAliPas encore d'évaluation
- Self Assessment ProcedureDocument47 pagesSelf Assessment ProcedureHayyaAliPas encore d'évaluation
- Quality Tools & TechniquesDocument31 pagesQuality Tools & TechniquesHayyaAliPas encore d'évaluation
- Piya Rang Kala by Baba Yahya KhanDocument7 pagesPiya Rang Kala by Baba Yahya Khangulzarsmebank67% (3)
- Sustainable DevelopmentDocument9 pagesSustainable DevelopmentHayyaAliPas encore d'évaluation
- 6 Multi Degree Freedom SystemsDocument13 pages6 Multi Degree Freedom Systemsarunscribd20100% (1)
- Audit Summary ReportDocument3 pagesAudit Summary ReportHayyaAliPas encore d'évaluation
- Introduction To PolymersDocument20 pagesIntroduction To PolymersHayyaAliPas encore d'évaluation
- Presentation NameDocument17 pagesPresentation NameHayyaAliPas encore d'évaluation
- Kitne Bade Hain Hausle Parwardegar KeDocument40 pagesKitne Bade Hain Hausle Parwardegar KeMUZAMMIL AHMED KHANPas encore d'évaluation
- Level MeasurementDocument18 pagesLevel MeasurementHayyaAliPas encore d'évaluation
- Process AssignmentDocument6 pagesProcess AssignmentHayyaAliPas encore d'évaluation
- Final OB AssgnDocument9 pagesFinal OB AssgnHayyaAliPas encore d'évaluation
- Types of Evaporato RsDocument13 pagesTypes of Evaporato RsHayyaAliPas encore d'évaluation
- Business Communication and HR Management ViewDocument32 pagesBusiness Communication and HR Management ViewHayyaAliPas encore d'évaluation
- Ipc Quiz AssignDocument12 pagesIpc Quiz AssignHayyaAliPas encore d'évaluation
- Ipc Final FinalDocument12 pagesIpc Final FinalHayyaAliPas encore d'évaluation
- Question # 1 DefineDocument17 pagesQuestion # 1 DefineHayyaAli100% (2)
- 555 Timer 40khz IRDocument2 pages555 Timer 40khz IRapi-3712130Pas encore d'évaluation
- Faculty of Engineering and Computing Sciences: Annexure-IDocument2 pagesFaculty of Engineering and Computing Sciences: Annexure-IAkshay MehtaPas encore d'évaluation
- Carbon 06 00052Document17 pagesCarbon 06 00052Elbahi DjaalabPas encore d'évaluation
- TR01B - Muhammad Aditya Prana Yoga - Analisa Listrik Chapter8.3Document3 pagesTR01B - Muhammad Aditya Prana Yoga - Analisa Listrik Chapter8.3AzeedPas encore d'évaluation
- Cagayan State University: Republic of The PhilippinesDocument21 pagesCagayan State University: Republic of The PhilippinesblessaPas encore d'évaluation
- ELEN3017A Project Brief 2022 Rev2Document3 pagesELEN3017A Project Brief 2022 Rev2Dick MabhidaPas encore d'évaluation
- Problem Set Ee8205 PDFDocument4 pagesProblem Set Ee8205 PDFksajjPas encore d'évaluation
- MCQ Metrology (CCCM & CCCT) PDFDocument21 pagesMCQ Metrology (CCCM & CCCT) PDFSahil Gauhar67% (3)
- Babcock University Bookshop An Babcock University BookshopDocument11 pagesBabcock University Bookshop An Babcock University BookshopAdeniyi M. AdelekePas encore d'évaluation
- Armando Anaya Guenter y Zender - Sak Tz'iDocument14 pagesArmando Anaya Guenter y Zender - Sak Tz'iAngel Sanchez GamboaPas encore d'évaluation
- SMD Meter User's ManualDocument2 pagesSMD Meter User's ManuallucianoPas encore d'évaluation
- Shop Exercise 5Document16 pagesShop Exercise 5Athena GrotesquePas encore d'évaluation
- Synopsis: in Order To Decrease Cross Sectional Area of Structural Members, Ultra High StrengthDocument16 pagesSynopsis: in Order To Decrease Cross Sectional Area of Structural Members, Ultra High StrengthHector Alberto Garcia LopezPas encore d'évaluation
- Understanding the Strength and Limitations of DES EncryptionDocument32 pagesUnderstanding the Strength and Limitations of DES EncryptionArya KumariPas encore d'évaluation
- Guide For Dynamic Report Generator - EndsfsdfsdfsdfsdfDocument15 pagesGuide For Dynamic Report Generator - Endsfsdfsdfsdfsdfmtech structuresPas encore d'évaluation
- Financial Modelling Assignment - Ghizal Naqvi (Attock Petroleum Limited)Document13 pagesFinancial Modelling Assignment - Ghizal Naqvi (Attock Petroleum Limited)Ghizal NaqviPas encore d'évaluation
- ZF AVS Automatic Gearbox Manual PDFDocument67 pagesZF AVS Automatic Gearbox Manual PDFDardan HusiPas encore d'évaluation
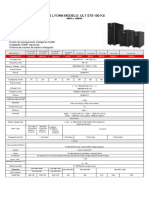
- Ups Lyonn Modelo: Ult St5-100 KS: 10KVA A 120KVADocument1 pageUps Lyonn Modelo: Ult St5-100 KS: 10KVA A 120KVASebastian Matias CruzPas encore d'évaluation
- Border Security Using Wireless Integrated Network Sensors (WINS)Document18 pagesBorder Security Using Wireless Integrated Network Sensors (WINS)Pradeep CheekatlaPas encore d'évaluation
- Grade 6 MathDocument12 pagesGrade 6 Mathapi-264682510Pas encore d'évaluation
- Lab 2 ECADocument7 pagesLab 2 ECAAizan AhmedPas encore d'évaluation
- Heliosit OrthodonticDocument20 pagesHeliosit OrthodonticAndhika Galih PrasetyoPas encore d'évaluation
- 20-SDMS-02 Overhead Line Accessories PDFDocument102 pages20-SDMS-02 Overhead Line Accessories PDFMehdi SalahPas encore d'évaluation