Vous aimerez peut-être aussi
- OptimizationDocument96 pagesOptimizationGuruKPO67% (3)
- Modelling Asynchronous Machines by Electric Circuits: SebestyenDocument27 pagesModelling Asynchronous Machines by Electric Circuits: Sebestyenni60Pas encore d'évaluation
- PMSM 3Document4 pagesPMSM 3VegembogaPas encore d'évaluation
- Spiral Vector Theory of Brushless DC MotorDocument8 pagesSpiral Vector Theory of Brushless DC Motorrigo84Pas encore d'évaluation
- Comparison of Field Oriented Control and Direct Torque Control For Permanent Magnet Synchronous Motor PMSMDocument6 pagesComparison of Field Oriented Control and Direct Torque Control For Permanent Magnet Synchronous Motor PMSMjp_20_20Pas encore d'évaluation
- The DQ Transformation and Feedback Linearization of A Permanent Magnet Synchronous MotorDocument5 pagesThe DQ Transformation and Feedback Linearization of A Permanent Magnet Synchronous MotorUzairChaudharyPas encore d'évaluation
- Short Circuit Current Forces PDFDocument4 pagesShort Circuit Current Forces PDFDaniel MemijePas encore d'évaluation
- On Modelling Iron Core NonlinearitiesDocument9 pagesOn Modelling Iron Core Nonlinearitiesjdjjarami100% (1)
- Direct Torque ControlDocument5 pagesDirect Torque ControljanusanusPas encore d'évaluation
- Design and Simulation of Control System For Bearingless Synchronous Reluctance Motor PDFDocument5 pagesDesign and Simulation of Control System For Bearingless Synchronous Reluctance Motor PDFKrishnam NaiduPas encore d'évaluation
- Computation of Leakage Flux and Magnetic Force in Transformer by Using Field-Circuit Coupled Finite Element MethodDocument4 pagesComputation of Leakage Flux and Magnetic Force in Transformer by Using Field-Circuit Coupled Finite Element MethodmehdivinciPas encore d'évaluation
- Simulation and Analysis Calculation of PMBLDCM Based On Time-Stepping Finite Element and Matlab MethodsDocument4 pagesSimulation and Analysis Calculation of PMBLDCM Based On Time-Stepping Finite Element and Matlab Methodsபொன்னியின் செல்வன்Pas encore d'évaluation
- Small Signal Stability AnalysisDocument6 pagesSmall Signal Stability AnalysischeshankarPas encore d'évaluation
- Campeanu Tranzitoriu SincronDocument10 pagesCampeanu Tranzitoriu SincronvalentinmullerPas encore d'évaluation
- Induction Motor FattynessDocument6 pagesInduction Motor FattynessMuhammad Ali Masood CheemaPas encore d'évaluation
- Modeling Induction Motors: Abstract: in This Paper, A Novel Technique For On-Line Estimation of MostDocument10 pagesModeling Induction Motors: Abstract: in This Paper, A Novel Technique For On-Line Estimation of Mostseshubabu_999Pas encore d'évaluation
- Modeling, Simulation, and Analysis of Permanent-Magnet Motor Drives, The Brushless DC Motor DriveDocument6 pagesModeling, Simulation, and Analysis of Permanent-Magnet Motor Drives, The Brushless DC Motor Drivekishan kharelPas encore d'évaluation
- Extreme Possibilities of Circuital Models of Electric MachinesDocument10 pagesExtreme Possibilities of Circuital Models of Electric Machinesmherold2Pas encore d'évaluation
- Modeling and Dynamic Simulation of Permanent Magnet Brushless DC Motor (PMBLDCM) DrivesDocument2 pagesModeling and Dynamic Simulation of Permanent Magnet Brushless DC Motor (PMBLDCM) DrivesmillionPas encore d'évaluation
- Transactionson Power Systems On Modelling Iron Core NonlinearitiesDocument9 pagesTransactionson Power Systems On Modelling Iron Core NonlinearitiesRafael BarrosPas encore d'évaluation
- Development of Analytical Approach For Linear Switched Reluctance Motor and Its Validation by Two Dimensional FEA (Mahmoud 2014)Document15 pagesDevelopment of Analytical Approach For Linear Switched Reluctance Motor and Its Validation by Two Dimensional FEA (Mahmoud 2014)arnika33100% (1)
- Modeling of Permanent Magnet Motor Drives: Ieee Transactions On Industrial Electronics, Vol. NO 4, NovemberDocument5 pagesModeling of Permanent Magnet Motor Drives: Ieee Transactions On Industrial Electronics, Vol. NO 4, NovemberMeena RamPas encore d'évaluation
- 3D MSC/EMAS Simulation of A Three Phase Power Transformer by Means of Anisotropic Material PropertiesDocument11 pages3D MSC/EMAS Simulation of A Three Phase Power Transformer by Means of Anisotropic Material PropertiesConstantin DorinelPas encore d'évaluation
- A STUDY ON DETERMINATION OF PARAMETERS FOR PERMANENT MAGNET Synchro PDFDocument6 pagesA STUDY ON DETERMINATION OF PARAMETERS FOR PERMANENT MAGNET Synchro PDFPolo DelgadoPas encore d'évaluation
- JESV5SI0109Document5 pagesJESV5SI0109Kiran YaddanapudiPas encore d'évaluation
- Arindam Seminar 11Document6 pagesArindam Seminar 11Arindam BhattacharjeePas encore d'évaluation
- Design and Simulation of Field Oriented Control of VSI Fed Induction Motor DriveDocument10 pagesDesign and Simulation of Field Oriented Control of VSI Fed Induction Motor Drivesuhail ahmadPas encore d'évaluation
- 87 Kutt Michna PopDocument6 pages87 Kutt Michna PopVally ZazaPas encore d'évaluation
- Current Control of PMSMDocument6 pagesCurrent Control of PMSMRintuMathunniPas encore d'évaluation
- Matrix Analysis Techniques in Cage Induction Machines: David G. DorrellDocument7 pagesMatrix Analysis Techniques in Cage Induction Machines: David G. Dorrellni60Pas encore d'évaluation
- Improved Design For Reduction of Torque Ripple of Brushless DC MotorDocument4 pagesImproved Design For Reduction of Torque Ripple of Brushless DC MotorPhạm Văn TưởngPas encore d'évaluation
- Modeling and Simulation of A PWM Rectifier Inverter Induction Motor Drive System Implementing Speed Sensor Less Direct Vector ControlDocument6 pagesModeling and Simulation of A PWM Rectifier Inverter Induction Motor Drive System Implementing Speed Sensor Less Direct Vector ControlFarhan SarwarPas encore d'évaluation
- Prediction of Harmonics Produced by Multiple Variable Speed Drives With Randomly Fluctuating LoadsDocument5 pagesPrediction of Harmonics Produced by Multiple Variable Speed Drives With Randomly Fluctuating LoadsAamir JavedPas encore d'évaluation
- PM Linear ActuatorDocument7 pagesPM Linear ActuatorGthulasi78Pas encore d'évaluation
- Modelling A Linear and Limited Travel SolenoidDocument6 pagesModelling A Linear and Limited Travel SolenoidsayproPas encore d'évaluation
- Regular Paper Impact of Mechanical Forces in A 25ka Current Injection TransformerDocument14 pagesRegular Paper Impact of Mechanical Forces in A 25ka Current Injection TransformerConstantin DorinelPas encore d'évaluation
- Xiicleee RBP 1754revDocument6 pagesXiicleee RBP 1754revrbargallo0Pas encore d'évaluation
- Meng-Jen Chen, Yu-Chi Wu, Jie-Lu Liao, Jin-Yuan Lin, Hsien-Yin Chiang, and Wen-Liang HuangDocument10 pagesMeng-Jen Chen, Yu-Chi Wu, Jie-Lu Liao, Jin-Yuan Lin, Hsien-Yin Chiang, and Wen-Liang HuangGeet DeokatePas encore d'évaluation
- 06 - T190 - Roma Rinkeviciene - Modelling AC Induction Drive With PSpice PDFDocument4 pages06 - T190 - Roma Rinkeviciene - Modelling AC Induction Drive With PSpice PDFKUNDANLANSPas encore d'évaluation
- State Space Analysis of Power System Stability EnhDocument6 pagesState Space Analysis of Power System Stability EnhAmmar MyhoubPas encore d'évaluation
- Carrier Signal Based Sensorless Control of Electrically Excited Synchronous PDFDocument10 pagesCarrier Signal Based Sensorless Control of Electrically Excited Synchronous PDFKhaled ChaibainouPas encore d'évaluation
- IJCER (WWW - Ijceronline.com) International Journal of Computational Engineering ResearchDocument5 pagesIJCER (WWW - Ijceronline.com) International Journal of Computational Engineering ResearchInternational Journal of computational Engineering research (IJCER)Pas encore d'évaluation
- Nonlinear Mathematical Modeling and Simulation of Switched Reluctance MotorDocument6 pagesNonlinear Mathematical Modeling and Simulation of Switched Reluctance MotorAkshay ArksaliPas encore d'évaluation
- Oscillatory Synchronous Linear Motor With Permanent-Magnet ExcitationDocument5 pagesOscillatory Synchronous Linear Motor With Permanent-Magnet ExcitationJon JonPas encore d'évaluation
- Casoria 2003Document12 pagesCasoria 2003waael abdulhassanPas encore d'évaluation
- Space Vector Flux Weakening Control of PMSM DriverDocument8 pagesSpace Vector Flux Weakening Control of PMSM DriverOsama AttookPas encore d'évaluation
- Machine Simulation ModelsDocument22 pagesMachine Simulation ModelsAshwani RanaPas encore d'évaluation
- Dynamic Modeling of PMSMDocument10 pagesDynamic Modeling of PMSMHisham Magdi El DeebPas encore d'évaluation
- Calculation of Short Circuit Reactance and Electromagnetic Forces in Three Phase Transformer by Finite Element MethodDocument6 pagesCalculation of Short Circuit Reactance and Electromagnetic Forces in Three Phase Transformer by Finite Element MethodJay JoshiPas encore d'évaluation
- IM FEM AnalysisDocument20 pagesIM FEM AnalysisvishiwizardPas encore d'évaluation
- 10 - Overvoltage Calculation by Monte Carlo Method With Accurate Substation Components Modeling PDFDocument5 pages10 - Overvoltage Calculation by Monte Carlo Method With Accurate Substation Components Modeling PDFAnonymous IjLgxu9fXPPas encore d'évaluation
- Under Voltage Unbalance Using Circle: Analysis of Induction Motor The Diagram MethodDocument6 pagesUnder Voltage Unbalance Using Circle: Analysis of Induction Motor The Diagram MethodHershal RockksPas encore d'évaluation
- On Identification of Synchronous Machine Parameters Using DC Decay TestDocument5 pagesOn Identification of Synchronous Machine Parameters Using DC Decay TestmcrahanPas encore d'évaluation
- MATLAB SIMULINK Based DQ Modeling and Dynamic Characteristics of Three Phase Self Excited PDFDocument5 pagesMATLAB SIMULINK Based DQ Modeling and Dynamic Characteristics of Three Phase Self Excited PDFBhushan MankarPas encore d'évaluation
- Jaswant Scopus PaperDocument15 pagesJaswant Scopus PaperpreetivermaeeePas encore d'évaluation
- Stator Winding Induction Motor in The EMTPDocument8 pagesStator Winding Induction Motor in The EMTPEleazar Sierra EspinozaPas encore d'évaluation
- An Investigation of The Harmonic Characteristics of Transformer Excitation Current Under Nonsinusoidal Supply VoltageDocument9 pagesAn Investigation of The Harmonic Characteristics of Transformer Excitation Current Under Nonsinusoidal Supply VoltageJAY PARIKHPas encore d'évaluation
- Research Article: Simulations of Transformer Inrush Current by Using BDF-Based Numerical MethodsDocument11 pagesResearch Article: Simulations of Transformer Inrush Current by Using BDF-Based Numerical MethodsDavid LopesPas encore d'évaluation
- Mathematical Driving Model of Three Phase Induction Motors in Stationary Coordinate FrameDocument11 pagesMathematical Driving Model of Three Phase Induction Motors in Stationary Coordinate Framegodspower brunoPas encore d'évaluation
- Advantest r6441 DMM User ManualDocument263 pagesAdvantest r6441 DMM User Manualhieuhuech1Pas encore d'évaluation
- 2SP0115T Control IGBT ManualDocument21 pages2SP0115T Control IGBT Manualhieuhuech1Pas encore d'évaluation
- TDS7000 SeriesDocument254 pagesTDS7000 Serieshieuhuech1Pas encore d'évaluation
- Real-Time Interface Dspace DSDocument12 pagesReal-Time Interface Dspace DShieuhuech1Pas encore d'évaluation
- Tektronix A6303 070390504Document34 pagesTektronix A6303 070390504hieuhuech1Pas encore d'évaluation
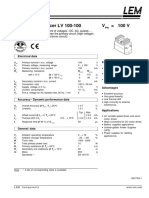
- Lem Voltage 100-500Document2 pagesLem Voltage 100-500hieuhuech1Pas encore d'évaluation
- Sanwa pc500Document42 pagesSanwa pc500hieuhuech1Pas encore d'évaluation
- Msp-Exp430G2 Launchpad Workshop: - Meet The Launchpad - Lab 1: Blink Launchpad LedsDocument16 pagesMsp-Exp430G2 Launchpad Workshop: - Meet The Launchpad - Lab 1: Blink Launchpad Ledshieuhuech1Pas encore d'évaluation
- Design of A Microcontroller-Based Circuit For Software ProtectionDocument6 pagesDesign of A Microcontroller-Based Circuit For Software Protectionhieuhuech1Pas encore d'évaluation
- Stator Flux and Speed - HADocument6 pagesStator Flux and Speed - HAhieuhuech1Pas encore d'évaluation
- Ansys Chu y Chicago Modeling and Simulation of Brushless DC Motor Drive SystemDocument25 pagesAnsys Chu y Chicago Modeling and Simulation of Brushless DC Motor Drive Systemhieuhuech1Pas encore d'évaluation
- Simulation Study On Speed Control of Permanent Magnet Direct-Driven System For Mining ScraperDocument11 pagesSimulation Study On Speed Control of Permanent Magnet Direct-Driven System For Mining Scraperhieuhuech1Pas encore d'évaluation
- Fod8316 108263Document30 pagesFod8316 108263hieuhuech1Pas encore d'évaluation
- Sensorless Foc of PMSM Chu YDocument42 pagesSensorless Foc of PMSM Chu Yhieuhuech1Pas encore d'évaluation
- Speed Control Design of A PMSM Based On Functional Model Predictive ApproachDocument15 pagesSpeed Control Design of A PMSM Based On Functional Model Predictive Approachhieuhuech1Pas encore d'évaluation
- MIKE21Document16 pagesMIKE21Defza HuristuPas encore d'évaluation
- Analysis of 3d Electric Field and Insualtion of Oil-Immersed Inverted Current Transformer PDFDocument4 pagesAnalysis of 3d Electric Field and Insualtion of Oil-Immersed Inverted Current Transformer PDFibrahimPas encore d'évaluation
- C 4 A P B F S: Hapter Nalysis of Lanar Eam and Rame TructuresDocument70 pagesC 4 A P B F S: Hapter Nalysis of Lanar Eam and Rame TructuresElmar CuellarPas encore d'évaluation
- Simplified Numerical Analysis of Suspension Bridges: Diego Cobo Del Arco and Angel C. Aparicio, Technical University ofDocument11 pagesSimplified Numerical Analysis of Suspension Bridges: Diego Cobo Del Arco and Angel C. Aparicio, Technical University ofJosue LewandowskiPas encore d'évaluation
- WL-TR-97-4014: 3D Boundary Element AnalysisDocument53 pagesWL-TR-97-4014: 3D Boundary Element Analysisss ssPas encore d'évaluation
- FEM Book of Gangan Prathap PDFDocument121 pagesFEM Book of Gangan Prathap PDFjohnPas encore d'évaluation
- Chapter 2 Fundamentals of Tissue OpticsDocument31 pagesChapter 2 Fundamentals of Tissue Opticshaim1235Pas encore d'évaluation
- Finite Element Method 2017 BatchDocument64 pagesFinite Element Method 2017 BatchSarah BardiPas encore d'évaluation
- Uplift PressureDocument10 pagesUplift PressureBurhan AhmadPas encore d'évaluation
- PrePoMax-v1 2 1-ManualDocument38 pagesPrePoMax-v1 2 1-ManualMarcelo ResendePas encore d'évaluation
- Rectangular Plate With Circular HoleDocument9 pagesRectangular Plate With Circular Holebalusharma1212Pas encore d'évaluation
- 04 - Structural Engineering and Construction ManagementDocument45 pages04 - Structural Engineering and Construction ManagementCandace Buckner0% (1)
- 1.phase of DesignDocument26 pages1.phase of DesignAekkasit SenaartPas encore d'évaluation
- Design and Analysis With Numerical Method of Gantry Crane Main BeamDocument7 pagesDesign and Analysis With Numerical Method of Gantry Crane Main BeamdbaPas encore d'évaluation
- Pub - Finite Element Analysis PDFDocument694 pagesPub - Finite Element Analysis PDFR.b. MorandsPas encore d'évaluation
- 05 - Analysis Reference - Chapter-5 AlgorithmDocument61 pages05 - Analysis Reference - Chapter-5 Algorithmrahul pathakPas encore d'évaluation
- 1DExample: Boundary Element MethodDocument15 pages1DExample: Boundary Element Methodrohanamishra01Pas encore d'évaluation
- Noise Radiated by Electric Motors: Simulation Process and Overview of The Optimization ApproachesDocument12 pagesNoise Radiated by Electric Motors: Simulation Process and Overview of The Optimization Approacheskarthiks25Pas encore d'évaluation
- Pap 1Document1 pagePap 1Anonymous K48TgviPas encore d'évaluation
- Research ArticleDocument9 pagesResearch ArticleADII 2701Pas encore d'évaluation
- 9-Fracture Modelling Methodology PDFDocument45 pages9-Fracture Modelling Methodology PDFmamspaps100% (1)
- Error Analysis PDFDocument2 pagesError Analysis PDFGwenPas encore d'évaluation
- Nastran DST Group TN 1700Document69 pagesNastran DST Group TN 1700Minh LePas encore d'évaluation
- Kontoe Et Al 2013Document11 pagesKontoe Et Al 2013Rodrigo Torres AguirrePas encore d'évaluation
- 2011 Comp Parta Mise en Forme Simu ExpéDocument11 pages2011 Comp Parta Mise en Forme Simu Expéranim najibPas encore d'évaluation
- 15etn052 Finite Element Methods Question Bank Unit I Introduction 2 Mark QuestionsDocument5 pages15etn052 Finite Element Methods Question Bank Unit I Introduction 2 Mark QuestionsPrabakaran MgkPas encore d'évaluation
- Computational AssignmentDocument16 pagesComputational AssignmentAshebirPas encore d'évaluation
- Structural Design Calculation SampleDocument17 pagesStructural Design Calculation Sampleihpeter83% (6)
- Introduction CAEDocument3 pagesIntroduction CAEsachin kanvikarPas encore d'évaluation
- Investigation of Wet Ceramic Extrusion PDFDocument16 pagesInvestigation of Wet Ceramic Extrusion PDFHector RamírezPas encore d'évaluation
- The Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceD'EverandThe Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidencePas encore d'évaluation
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeD'EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeÉvaluation : 4.5 sur 5 étoiles4.5/5 (10)
- Electrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tD'EverandElectrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tÉvaluation : 4.5 sur 5 étoiles4.5/5 (27)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionD'EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionÉvaluation : 4.5 sur 5 étoiles4.5/5 (543)
- Multiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...D'EverandMultiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...Pas encore d'évaluation
- Power System Control and ProtectionD'EverandPower System Control and ProtectionB. Don RussellÉvaluation : 4 sur 5 étoiles4/5 (11)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialD'EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialÉvaluation : 3.5 sur 5 étoiles3.5/5 (3)
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesD'EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesÉvaluation : 5 sur 5 étoiles5/5 (1)
- Digital Transformation: Survive and Thrive in an Era of Mass ExtinctionD'EverandDigital Transformation: Survive and Thrive in an Era of Mass ExtinctionÉvaluation : 4.5 sur 5 étoiles4.5/5 (9)
- A Mind at Play: How Claude Shannon Invented the Information AgeD'EverandA Mind at Play: How Claude Shannon Invented the Information AgeÉvaluation : 4 sur 5 étoiles4/5 (53)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersD'Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersÉvaluation : 5 sur 5 étoiles5/5 (1)
- Teach Yourself Electricity and Electronics, 6th EditionD'EverandTeach Yourself Electricity and Electronics, 6th EditionÉvaluation : 3.5 sur 5 étoiles3.5/5 (15)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionD'EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionÉvaluation : 4 sur 5 étoiles4/5 (331)
- Guide to the IET Wiring Regulations: IET Wiring Regulations (BS 7671:2008 incorporating Amendment No 1:2011)D'EverandGuide to the IET Wiring Regulations: IET Wiring Regulations (BS 7671:2008 incorporating Amendment No 1:2011)Évaluation : 4 sur 5 étoiles4/5 (2)
- Programming the Raspberry Pi, Third Edition: Getting Started with PythonD'EverandProgramming the Raspberry Pi, Third Edition: Getting Started with PythonÉvaluation : 5 sur 5 étoiles5/5 (2)
- Build Your Own Electronics WorkshopD'EverandBuild Your Own Electronics WorkshopÉvaluation : 3.5 sur 5 étoiles3.5/5 (3)
- Retro Gaming with Raspberry Pi: Nearly 200 Pages of Video Game ProjectsD'EverandRetro Gaming with Raspberry Pi: Nearly 200 Pages of Video Game ProjectsPas encore d'évaluation
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsD'EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsÉvaluation : 3.5 sur 5 étoiles3.5/5 (2)
- Open Radio Access Network (O-RAN) Systems Architecture and DesignD'EverandOpen Radio Access Network (O-RAN) Systems Architecture and DesignPas encore d'évaluation
- Empires of Light: Edison, Tesla, Westinghouse, and the Race to Electrify the WorldD'EverandEmpires of Light: Edison, Tesla, Westinghouse, and the Race to Electrify the WorldÉvaluation : 4 sur 5 étoiles4/5 (87)
- From Circuits to Components: Understanding Electronic FundamentalsD'EverandFrom Circuits to Components: Understanding Electronic FundamentalsPas encore d'évaluation
- C++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingD'EverandC++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingÉvaluation : 4 sur 5 étoiles4/5 (1)