(2)
oy
ow
2
3)
wo
en
@
6s)
(2
on}
68)
United States Patent
Adams et al.
AGRICULTURAL IMPLEMENT WITH
COMBINED DOWN FORCE AND DEPTH
CONTROL,
Applicant: CNH Ameriea LLC, New Holland, PA,
ws)
Inventors; Brian T. Adams, Centralia, MO (US);
Keith W, Wendte, Willowbrook, IL (US)
Assignee: CNH Industrial Ameriea LLC, New
Holland, PA (US)
Notice: Subject to any disclaimer, the term ofthis
patent is extended ot adjusted under 35
USC. 1546) by 72 days,
This patent is subjeet to a terminal dis-
claims,
Appl. No 19967873
Filed: Aug. 15,2013
Prior Publication Data
2OIMOSI96IAL Dee. 5,2013
Related US. Application Data
Division of application No, 120870:94, filed on Avg
30, 2010, now Pat. No. 8.522.889
In.Cl.
ALB 3308
‘ALB 63/111
(2006.01)
(2005.01)
(Continued
OLB 33/087 (2013.01), AOLB 63/111
(2013.01); a07C S64 2013.01): AOTC 57068
(2013.01); AOTC 7203 2013.01): AOIC 7205
(201301)
Field of Classification Search
CPC. AOIB 38087; AOIB 3808; AOTB 33/00;
'US009215837B2
(10) Patent No.
4s) Date of Patent:
US 9,215,837 B2
*Dee. 22, 2015
A011 63/10; AOIB 63/02; AO1B 63/00;
AOIB 63/111: AIC 7/205: ADIC 5/00
AIC 5106; ADIC 5/062; AOLC 5/068:
AIC 51066: AOIC 5/068: ADIC 710:
AOIC 7108; AOIC 7/20; AOIC 7/201; AOIC
708
172/2, 4; 701/50; 111/200, 900,903,
111/52, 59-66, 134-137, 69-71, 79,81
111/139, 140, 143, 149, 151, 157, 163-168,
111/190-195|
‘See pplication ile for complete search history
usec
66) References Cited
US. PATENT DOCUMENTS
4176721 121979 Poggensileret a
$210260 8 "71980 Lonel
(Continved)
OTHER PUBLICATIONS
US. Appl No, 13967,
fed Aug. 15.2013, Adams ta
(Continved)
Primary Examiner
(74) Attornes Agent oF Firm
Christopher INovossd
Rebecca L, Heakel
on
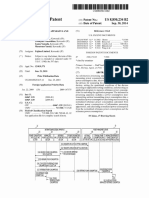
An agricultural implement system is provided that incades 3
‘down force cylinder eonfigured to apply a downeard force
‘row unit and a depth contol cylinder configured to vary &
penetration depth of ground engaging tool ofthe ow uni.
The agricultural implement system also includes a valve
assembly in uid communication with the dvsn free eylin
der and the depth contol cylinder. The valve assembly is
configured to amtomatically adjust the downward foree by
varying Muid pressure within the down force eylinder based
‘on Mid presse within the depth contro cylinder,
ABSTRACT
3.Claimns,§ Drawing Sheets
wes awe
Graig |S te
US 9,215,837 B2
Page 2
(1) Ime 6.2167 BL 42001. Bockt
{6349.909 BL $2002 Diallo
eee ey ‘sestaes br 22001 pine
AvIc 720 (2006.01) S5OL887 BI 32004 emenet a
(6761500 8273004 Kovach ea
56 References Cited sere BE 122001 Went
oe Hiortis 2S 2007 Wente eat
[ENTS 7304859 B2 122007 Wendt eta.
Ceuta 7398769 82 ‘7/008 Jensen
oh foe ear FA01861 BL 72008 Ke
aesaee nee aiioed eoueette aan TASLI7S BL 1/2609 Pomedli etal
Steroid ioe se SAi717 B2 $2013 Alam etal
¥ fee aooeostvaor AT 9006 Sour ta:
B2ag73 A 111993 Te eta doosinos a
SSMU A ‘tops Tone tal aoowo08747s AL 22008 Stele ta
5524500 AG 1990 Caner OTHER PUBLICATIONS
@m339 A 62000 Fame ca
8107340 A 62000 Flame ea
US. Appl. No. 13800,427, fled May 9, 2013, Adams eta
U.S. Patent Dec. 22, 2015 Sheet 1 of 5 US 9,215,837 B2
US 9,215,837 B2
Sheet 2 of 5
Dec. 22, 2015
U.S, Patent
US 9,215,837 B2
Sheet 3 of 5
Dec. 22, 2015
U.S, Patent
‘v0L
201
901:
orl
0uNOS
“OLLWANINd
OL get
261
pt] JOVANI
801 00T ae € Old
CO HLT ell a7 (99)
v6.26 \ 091 ent
981] (24 pa tea icameileoe oe
oVaeo ae YOSNAS a ||
Se Be in tim EE
8] Foyy| Soe xv 98 i eu $21 og
\ Poe :
zél_92i yy Bee
onl z
ost +7
oz Bagt gg
B24) \ or EL
9g2 ove\ \er2\ \ese\ \ve O2t vel ezt 2st
pn, 192 t
882 poz 00z\ 912| 822 aie
tye ose
oez
US 9,215,837 B2
Sheet 4 of 5
Dec. 22, 2015
U.S, Patent
oa OL
WALSAS TO¥LNOD
OLLWWNANd OL
vSld
ASWASSY
MOSN3S
46
US 9,215,837 B2
Sheet 5 of 5
Dec. 22, 2015
U.S, Patent
3OuNos
‘SOLLWWMNd
OL
tL
vel
. JOVANSINI
S$ Old be
LN3WSTdN)
OL
US 9,215,837 B2
1
AGRICULTURAL IMPLEMENT WITH
COMBINED DOWN FORCE AND DEPTH
‘CONTROL
CROSS REFERENCE TO RELATED
"APPLICATIONS,
‘This application isa divisional of US. patent application
Ser. No. 12/870,949, entitled “AGRICULTURAL IMPLE-
MENT WITH COMBINED DOWN FORCE AND DEPTH
CONTROL”, filed Aug. 30, 2010, whiei is Berein incorpo-
rated by reference in its entirety
The invention relates generally to ground working equip
‘ment, such as agricultural equipment, and more spostialy,
‘o an implement incorporating a combined down force and
‘depth contro system maintain substantially usiform seed
‘deposition depth,
‘Generally seeding implements are towed behind 2 tractor
‘or other Work vehicle. For example, a tongue of the imple
rent may be eonnected toa drawbar ofthe trator or & mast
‘of the implement may be connected to a 3-point hiteh ofthe
tractor. These seoding implements typically include a ground
‘engaging tool or opener that forms a seeding path for seed
‘deposition into the soil, In certain configurations, a gauge
‘wheel is positioned a vertical distance above the opener 10
‘establish a desired treach depth for seed deposition into the
soil. As the implement travels across a field, the opener exc
‘ates a trench ino the sol, and seeds are deposited into the
trench. As wil be appreciated, maintaining a constant trench
depth provides a substantially uniform soil cover which
‘enhances crop yields
Certainimplemens include gauge whee rigidly mounted
‘o the implement at a desired vertical distance above the
‘opener. In suc implement, significant down force may be
‘applied to the gauge whee! to ensure thatthe opener remains
atthe desired penetration depth despite variations inthe ter-
rin, Unfortunately, providing sucha down forceto the gauge
‘wheel may compact the soil adjacent to the seed trench,
thereby impeding crop growth. Inadditon, because the gage
wheel is pressed fimnly against the soil surface, contact
between the gauge whee! or the opener and any obstructions
(eg, rocks, clods, ete.) may induce an acceleration that
propagates through the implement, thereby potentially edue-
Ing the operational ife of certain components within the
implement.
BRIEF DESCRIPTION
‘The present invention provides an implement including 3
valve assembly configured to maintsin a contact force
between a gauge wheel and the soil by controlling a dawn
ore applied toa ro unit, Inan exemplary embodiment, the
sgricultural implement ineludes a down foree eylinder con-
Figured to apply» dowusard force tothe row unt, The agri-
‘cultural implement also includes a depth contr eylinder
‘configured to vary a penetation depth of a ground engaging
tool of the row unit. Furthermore, the agricultural implement
includes a valve assembly in fluid communication with the
‘down force eylinder and the depth contol eylinder. The valve
‘assembly is configured 1 automatieally adjust the downward
oree by varying fd pressure within the dewwn forcecylinder
based oa uid peessure within the depth control eylinder. la
0
o
2
‘his manner, the contact force between the pauge wheel and
the soil surface may be maintained despite variations in the
DRAWINGS
‘These and other features, aspects, and advantages ofthe
present invention will hocome beter understood when the
Tollowing detsied description is read with reference to the
‘accompanying drawings in which ike characters represent
Tike parts throughout the drawings, wherein:
TIG. Tis perspective view of an exemplary agricultural
ment
FIG. 2 is aside view of an exemplary row wait that may be
‘employed within the agricultural implement shown in FIG. 1;
FIG. 3a schematic diagram of an exemplary pneumatic
system configured to automatically acusta down foreeon the
row unit based on pheumati pressure within a depth control
exlinder,
FIG. 4a schematic diagram ofan alternative pneumatic
system configured to sutomsaically equalize a contact force
ofa press whee! and a gauze wheel; and
FIG. 5 is a schematic diagram of an alternative manual
backup system configured to facilitate manual control ofthe
‘heuntate system.
DETAILED DESCRIPTION
‘Turning now tothe drawings, FIG. 1 isa perspective view
cof an agricultural implement 10, The implement 10 is
‘signed tobe towed behind a work vehicle sich as tractor
The implement 10 includes a tongue assembly 12 which is
shown in the form of an A-frame bitch assembly: The tongue
assembly 12 may include a hitch used o attach to an appro-
priate tractor bitch via a ball, clevis, or other coupling. For
‘example, a tongue of the implement may be connected to a
rawhar of the tractor, or @ mast ofthe implentent may be
‘connected to 3-point hitch ofthe trator. The tongue assem-
bly 12 is coupled toa tool bar 1d which supports multiple
seeding implements or row units 16, As discussed in detail
below. the agricultural implement 10 includes a pcumatic
system contigured to automatically adjust down foree on
cach row unit 16 based on vid pressure within a depth
control cylinder. For example, in certain embodiments, each
‘WW unit 16 includes an opener disk rtaialy coupled to @
chassis ofthe row unit 16 and configured to engage sol. The
‘ow unit 16 also includes a page whee! assembly movably
coupled o the chassis and including a gauge wheel config-
‘red to rote eros aso surface to lint a penetration depth
of the opener disk into the soil. In addition, the row unit 16
Includes depth contol cylinder extending between the chs
sisand the gauge wheel assembly. The depth control eylinder
is configured toadjus the penetration depthof theopener disk
by varying postion ofthe gauge whee! relative tothe chassis.
A down force cylinder extending between the tool barand the
chasis is configured to vary a contact force between the
gzange wheel and the sol surface. To adjust the contact Force,
8 down force contro valve is provided to regulate a flow of
uidto the down force eylinder The row unit 16 also ineldes
‘an actuator coupled tothe down force contol valve and in
‘uid communication with the depth conteol eylinder. The
actuator is configured to automatically adjust the contact
force by varying the flow of Muid through the down force
control valve based on fd pressure within the depth control
cylinder. In this manner, the contact force between the gage
‘wheel and the soil surface may he maintained despite varia-
‘ions in the trai,
US 9,215,837 B2
3
FIG,2 isa side view of an exemplary row unit 16 that may
be employed within the agricultural implement 10 shown ia
FIG. 1, Asillustzated, the co unit 16 includes elements 18 of
para linkage assembly, also known asa four bar linkage,
‘configured to couple the row unit 16 othe toolbar M4, while
‘enabling verical movement ofthe row unit 16. Inaddition, 2
‘dawn force cylinder 20 extends betwoen a mounting bracket
22 and a lower portion ofthe parallel linkage to establish #
‘contact force between the row tnt 16 and the sil. The down,
{ore cylinder 20 is configured io apply force othe row unit
16 in downward digection 24, thereby ceiving a ground
‘engaging (00 ino Use soil. As will he appreciate, desired
Fevel of down force may vary based on sol ype, the degree of
tillage applied to the sol, soil moisture content, amount of
residue cover andr tool wear among other factors, Because
such factors may vary from one side ofthe implement 10 10
the other, different level of down force may be selected for
‘each row unit 16
Furthermore desired level of down force may be depen
‘dent on the speed at whieh the ro unit 16s pulled seross the
field. For example, as speed increases, the ground engaging
tools may havea tendency 10 rise out ofthe ground due wo the
Jneraction between the soil and the tool. Conssquenty, &
zreater down forcemaybe applied during higher speed opera-
tion to ensure that the ground engaging tools remain at 2
‘desee! depth. In addition, the weight of the row unit 16
applies force othe ground engaging tools in the downward
‘direction 24, However, a8 seeds and/or eaher produets ate
transferred from astorage container within the ow unit 160
the sol, the weight of the row unit 16 decreases. Therefore,
the down force eyinder 20 may apply a greater force to the
row unit 16 to compensate. Incertain embodiments the down
{oree cylinder 20 may be coupled to control system cont
‘ured to autonsatically regulate the presse within the dow
force cylinder 20 to maintain a desired contact foree between
the ground engaging tools and ie soil. Because each row unit
16 includes an independent down fore eylinder 20, the con-
tact Tozce may vary across the implement 10, thereby estab-
lishing a substantially uniform soed deposition depth
throughout the field
Inthe present embodiment, the parallel linkage elements
18 ace pivotally coupled to a chassis 26 and a frame 28. The
fame 28 may be configured to support various elements of
the row unit 16 suet as a metering system and a product
storage container, for example. As illustrated, the chassis 26
supports an opener assembly 30, a sol losing assembly 32,
‘a press assembly 34, and a residue manager assembly 36. In
the present configuration, the opener assembly 30 includes 2
gauge whee! assembly having a gauge whee! 38 and a roat-
able arm 40 which Funetions to movably couple the gauge
‘wheel 38 to the chassis 26. The gauge wheel 38 may be
Positioned a vertical distance D above an opener disk 42 10
‘slablsh a desired treach depth for seed deposition int the
Soil. As the row unit 16 travels cross a fil the opener disk
42 excavates a trench into the sol, and soeds are deposited
intothe trench, The opener assembly 30 also incides a depth
‘contol cylinder 44 extending between the chassis 26 and the
rotatable arm 40 of the gauge wheel assembly. The depth
contol eylinder 44 is configured to adjust the penetration
‘depth D of the opener disk 42 by varying a postion of the
tate wheel 38 relative tothe chasis 26. While one openee
assombly’ 30 is illustrated in the present embodiment, it
should be appreciated that altemative embodiments may
jnchides pair of opener assemblies 30 positioned on opposite
sides of the chassis 26. In such configuration, the opener
disks 42 may be angled toward one another to establish 3
Wider treach witha the sol
0
o
4
As willbe appreciated, seeds may be deposited within the
‘excavated trench via a seed tube extending between a meter
ing system within the frame 28 and the ol. The seed ube exit
‘may be positioned aft ofthe opener assembly 30 and forward
of the closing assembly 32 such that seeds flow into the
trench. Closing disks 46 ofthe closing assembly 30 pash the
excavated soil into the tench, thereby closing the tench. As
illustrated, the closing assembly 32 inclides an arm 4
extending between the chassis 26 and the closing disk 46. 8
losing disk cylinder is coupled tothe arm 48 of theclosing
assembly 32, and configured to regulate a contaet force
between the closing disk 46 andthe soi. Porexample, «lange
contet force may’ be applied to effectively push dense soil
into the trench, while a relatively small contact foree may be
Applied toclosea trench within loose sil. While one closing
disk 46 is shown in the present embodiment, it should be
apreciated that alternative embodiments may include a pair
of disks 46. In addition, cerain embodiments may employ
losing wheels instead othe illustrated closing disk 46
‘Asillusirated, a press wheel 82 of the press wheel assembly
Mis positioned af of the closing assembly 32, and serves
pack soil on top ofthe deposited seeds. Inthe present embod-
en, the press whee assembly 34 inchides anamn S4.extend-
ing between the chassis 26 and the press wheel §2. A press
‘whoo eylinder 6 is couple! tothe tm 54 of the press whoo!
assembly 34, and configured to reyulate a contact force
‘between the press whoo! $2 and the sil. For example, in dry
conditions, it may be desirable o firmly pack soil direedy
‘ver the sods to sea in moisture. In damp conditions, i may
be desirable to leave the soil over the seeds faiely Toose in
corer to avoid compaction which may result in seed cmisting,
The process of excavating a trench into the soi, depositing
seeds within the trench, closing the trench and packing soil on
{op of the seeds establishes a ow of planted seeds within a
field. By employing mulple cow units 16 distributed along
the tool bar 14, as showin in EIG. 1, multiple rows of seeds
‘may be planted within the fel,
Corian embodiments of the row unit 16 may employ’ a
reside manager assembly 36 to prepare the gruind belore
‘ood deposition. As ilusteated, the reside manager assembly
$inclddesa whee! 88 coupled tthe chassis 26by an atm 60,
The whet 58 includes tage points or fingers 62 configured
to break up crop reside om the soil surface. A residue man-
ager evlinder 64 extends froma bracket 66 o the em 60 ofthe
residue manager assembly 36, and configured to regulate @
cntaet faree between the wheel §8 and the soil While a
single residue manager wheel $8 is shown in the present
embodiment, it should be appreciated that altemative
‘mbodinients may include a pair of wheels $8 angled toward
‘one another. In the present embodiment, the reside manager
‘36may serves asliock absorber to dissipate row nit bounce
teased by contact with rocks of piles of residue, thereby
protecting mechanical components of Uke row unit 16
FIG. 3 sa schematie diagram of an exemplary prewmatic
system configured to automaticaly adjust the down foree on
‘hero unit basedon the pneumatie pressure within the depth
control cylinder. As illustrated, the present configuration
employs a pair of depth contro cylinders. For example, the
list depth Control cylinder 44 may’ be wilized to adjust the
position of the right gauge wheel 38 with respect to the
chassis 26, while a second depth contol eylinder 6 adjusts
the position ofa left gatige wheel. Such an embodiment may
‘employ corresponding pair of opener disks positioned adi-
‘ent to each gatige whee. In this configuration, the opener
disks may be angled toward one another to establish a wider
trench within the sil. While pairof depth contol cylinders
44 and 68 are employed inthe present configuration adjust
US 9,215,837 B2
5
the penetration depth ofa pair of opener disks, it should be
appreciated that alemative configurations may employ &
single opener assembly with a single depth coateo eylindr,
Tn the present configuration, both of the depth contol
‘ylindors 4 and 6 are in Hud communication with dps
‘contol valve 70 configured to regulate a pneumatic pressire
‘within the depth contol eylinders 44 and 68. As ilustrated,
the depth control valve 70 is three position! four way rotary
leveling valve. The first position 72 is configured to facilitate
a flow of sir out of the depth control cylinders 44 and 68,
thereby rising the gauge wheels relative to the chassis 26
“The second position T4 is configured to block the flow ofa
Jo and out of the eylinders 44 and 68 to hold the gauge
wheels a a desied position. The thi position 76 is conflg-
ured to facilitate flow of air from a pneumatic source to the
the planting depth is deeper than desired, the ECU 96 will
‘etvate the solenoid 94, thereby driving the selection contol
valve 88 to the sccond position 92. The ECU 96 will thea
‘ctvate the solenoid 110, thereby driving the inflate/exhaust
valve 98 fo the second position 196, In the second position >
106, ar from the pneumatic source will low into the pneu-
matic supply conduit 100. With the selection conteo] valve 88
in the second position 92, ar from the pneumatic supply
‘conduit 100 will os through the valve 88 and the pneumatic
‘conduit 86 tothe actuator 84 unl a desired pressure within
the actustor #4 is achieved, as measured by the pressure
sensor 112. Next, the ECU 96 will insirut the electronic
sctuator 94 to transition the valve BB to the fist position 9,
thereby blocking se low between the supply conduit 100 and
the actuator 84. Consequently, pressure within the cap end of
the aetuator 84 will be maintained at the desired pressure. As
previously discussed, increasing airpressureto the ap end of
the actuator 84 crives the depth contol valve 70 toward the
thind postion 76, thereby providing the depth contol ylin-
‘ders 44and 68 with ir fromthe supply conduit 78. Asaresult,
the gauge wheels will he driven dewnwardly until a desired
position is achieved,
‘Once the sensor assembly 97 determines that desired
penetration depth has been reached, the ECU 96 will tei
fale airflow to the depth control eylinders 44 aad 68. Spe-
citially, the ECU 96°will transition the selection contol
valve 88 to the second position 92, which establishes uid
‘communication betwoen the conduits 86 and 100, The ECU
‘96 will then transition the inlaelexhaust valve 98 to the
second position 104, which facilitates air flow out of the
pewinatic supply conduit 100, Consequently, pressure
within the cap end of the depth control actuator 84 will
‘decrease as ir exhausts fom the actuator 84s previously
sliscussed, the docrease nar pressure will drive thepiston rod
‘of the actuator 84 toward the cap end, thereby inducing the
‘depth control valve 70 to transition tothe second postion 74
hich Blocks airflow to the depth control eylinders44and 68.
‘Once the ECU 96 receives a sj fom the pressure sensor
112 thatthe pressure within the cap end ofthe actuator 84
‘corresponds ta pressure indicativeof the depth control valve
O being in the second position 74, the ECU 96 will transition
the selection control valve 88 tothe first postion 90 which
blocks Now to the pneumatic supply conduit 86, Conse-
‘quently, pressure within the actuator 84 will be maintained,
thereby blocking airflow to the depth control cylinders 44nd
64. It should he appreciated that transitioning the selection
‘contol valve 88 tothe second position 92 and transitioning
8
the infaofexhaust valve 98 othe fist potion 102 enables
the prossresensor 112 tomeanure the pressure within thoes
en of the actuator 88
nan altemative embodiment, the depth contol valve 70
may becoupled othe gnoge wheel amas 40 by ainkoge such
that movement of the gauge wheels 8 aitonsatically adjusts
presure To the depth contro cylinders 44 and 68, thereby
Fsinsining a desied penetration depth ofthe opener disks
42. For example ithe plntng depth is deeper than desired,
the raised poston the gage wheels 38 wil drive the depth
congo valve 700 te thi positon 76, thereby providing the
ph cotel cylinders 4 and 68 with irom the supply
conduit 78. AS a result the gauge wheels 38 will be driven
ciownsvardly untla desired positon s achieved. Asthe paige
‘wheels 8 approach the desited postion, the linkage wil
deve the depth control valve 70 to the second position T4
‘which blocks air flow tothe depth contol eylinder and 68,
{hereby establishing the desired planting depth, Conversely if
te planting depth is shallower than desire, the lowered
position of the gauge wheels 38 wil deve the depth contol
‘alve70to the fir position 72, thereby releasing arom the
pth contol eslnders 4 and 68. As a res, the gauge
‘wheels 38 ill be driven uporandly wat desired position
ichiove, As the gage whiels 38 approach the desired po
tion the linkage wil drive the dep contol valve 70 10 the
second position 74 which blocks air How feos the depth
contol eyinders 4 and 68, thereby establishing the desired
planing depth As will be appreciate, ectain row units 16
Include a single gauge whee! 8, gauge wheel arm 40 and
depth contol eyinder 44 Tn such embodiment, the depth
contolvalve 70-ille coupled othe gage wheel ann 0 by
the linkage. However. if the row unit 16 employs two gauge
‘wheels 38 two gnoge whe! ams 40 and two depth contol
Cylinders 44 and 68, the Hnkoge may be configured to
‘Bechanically average the position of the gauge wheels 38
Such that dept contol valve position is adjusted bsedon the
‘vor planting depth
“Te illustrate 0 tit 16 also inelodes a blocking valve
114 configured to maintain presire within the depth contol
cylinders 44 and 68 while the implement 10 isin a non-
‘working position. For example in cran configurations the
tool bar May beraised above the around ata headland ofa
Field such that the row units 16 discoasge the soil. Ln this
non-working poston theimlement 10 ay beewatd atthe
‘eadland and aligned wit the next series of rows wilhout the
0 mits 16 excavating tenches or depositing seeds within
the headin, Maintaining ae pressure within the depth con-
te eyindors 4 and 68 while the implement 10 1 in the
onsworking position caste that the gange wheel position
willremain substantially unchanged whea the row unit reen-
‘iges the soi. A illustrated, he blocking valve 1M ineldes
fit positon 116 ht fitter lo tothe depth contol
Cylinders 4 and 68, nd a second position 118 a bloeks the
‘eflow: Inthe presnt embodiment th blocking valve 14s
actuated by the parallel inkage 18 coupled to he too bar 1
Consequently. when the toolbar 14 transitions tothe non
‘working postion, the blocking valve 114 is driven to the
Second position 118 which blocks air ow Coaversly when
te tool bar 14 sin the working position, the Bloeking valve
114s dive to heft position 116 such thatthe pressure to
tbecplindes 44 and 68 nay be regulated as Jesribed above
To thellustrated embodiment dawn fore contol valve
120 in Haid commanication with the dove fore cylinder
20, Thedown force contro valve 120s configu to repute
a pressure within the downforce eslinder 20, thereby au
dng the contact force between the gage whee and the sc
Inthe present embodiment, the down force contol valve 120
US 9,215,837 B2
9
js a tive position/four way rotary leveling valve, The fist
position 122 is configured to block sir low to the down force
‘ylinder20, the second position 124s configured to facilitate
flow int the down force eyfinder 20, and the third position
126; configured to ficlitate airflow out ofthe dawn force
cylinder 20. As illustrated, a pacumatic conduit 128 extends
between the dawn free contol valve 120 and the pneumatic
supply conduit 78, and 3 pacumatic conduit 130 extends
between the dowen force contro valve 120 and the down force
cylinder 20. Consequently, while the down force contol
valve 120s inthe second position 124, airmay flow from the
peutic sourve tothe eap end the down forve elinder 20
ia the conduits 78, 128 and 130, and tho valve 120,
As illustrated, the position ofthe down force contro valve
120 is regulated by a down foree control aetustor 132. Inthe
present configuration, the down force control actuator 132 is
«a double acting pneumatic eylinder having a pneumatic sup-
ply condhit 134 coupled to the rod end ofthe cylinder. ln this
‘configuration the dawn fore contol valve 120 may be atu
ated by increasing or decreasing pressure othe rod end of the
actuator 132. For example, in the present configuration,
increasing pressure to the rod end drives the down force
‘contol valve 120 toward the second position 124, thereby
providing air pressure to the dawn foree eylinder 20. Con-
versely, doceasing pressure tothe actuator 132 allows pres-
sure within the cap end tounge the piston toward the rod end,
thereby diving the down force control valve 120 tothe third
positon 126 hat releases sir rom the dow foree cylinder 2.
TInthe presen configuration, the pressure within the pew
rmatie supply conduit 134 is controled by seloetion control
valve 136, Asillstrated, the seletion control valve 136 i 2
‘Wo position/two way paeumatic valve. The frst positon 138
Js configured to block air How through the valve, while the
second postion 140 facilitates air flow to the down force
‘control actor 132, An electronic actuator 142 (es. sole
noid regulates the position of the selection control valve 136.
‘The electronic actuator 142 is communicatively coupled t0
the FCU 96 which is configured to vary the postion of the
scletion control valve 136 to achieve a desired pressure
‘within the aetuator 132, Consequently, the ECU 96 may auto
‘matically regulate the force applied by the dewsn force eyin-
‘der 20, For example, an operator may input a desired down,
ore into user interface 144. The user interlace M44 may
then output a signal to dhe ECU 96 indicative of the desired
‘dowa force such that the ECU 96 adjusts the pressure within
the down foree senator 192 1 achieve the desired force Ia
‘certain embodiments, the sensor assembly 97 may be config
ured to measure the down force applied by the down force
‘ylinder 20. For example, the sensor assembly 97 may
‘include a pressure sensor in fluid communication with the
‘conduit 130 and configured o output signal indicative ofthe
ore applied by the doen foree cylinder 20, In such emboxt-
is, the ECU 96 may automaticaly regulate pressure
‘within the sctestor 132 to maintain the desired down force
"The selection control valve 136 is Mhidly coupled to the
exhaust valve 98 via the pneumatic supply conduit
100. As previously discussed, the inlate/exhaust valve 98 is
three positioa/four way valve. The fist position 102 is con-
figured to block se flow between the paeumstie supply con
‘duit 100 and he pneumatie source, the second position 104s,
‘configured to ficiltate airflow out of the pneumatic supply
‘conduit 100, and the third position 106 sconfiguredto idly
‘couple the pneumatic source tothe pneumatic supply conduit
100. By adjusting the position of the inflate/exhats valve 98,
the ECU 96 may selectively provide air to the pneumatic
supply conduit 100, maintain air pressore within the pc-
malic supply conduit 100, or release air from the pneumatic
0
o
10
supply conduit 100, In tis configuration, the BCU 96 may
provide desired pressure to the selection control valve 136
by adjusting the position ofthe infatelexhaust valve 98 via
the actuators 108 and 110,
"As previously diseussod, the ECU 96s configured to suto-
matically regulate the force applied by the dows force eyin-
der 20, For example, ifthe force is lower than desired, the
[ECU 96 will activate the solenoid 142, thereby driving the
section control valve 136 tothe second penition 140. The
[ECU 96 will then activate the solenoid 110, thereby driving
the infteexhiaust valve 98 to the second position 106, nthe
second postion 106, ar from the pneumatic source will ow
into the pneumatic Supply conduit 100. With the selection
control valve 136 in the second position 140, air from the
‘pneumatic supply conduit 100 wil ow through the valve 136
and the pneumatic conduit 134 to the actuator 132 until a
‘desired pressure within the actuator 192 is achieved, 2s mea-
sured by the pressure sensor 112. Next, the BCU 96 will
instruct the electronic actuator 142 to transition the valve 136
tothe frst postion 138, thereby blocking we low between the
supply eondit 100 and the actuator 132. Consequently re
sre within the rod end of the actuator 132 willbe msinained
atthe desired pressure. As previously discussed, increasing
sirpressure to the rod end of the aetuator 132 drives the down
force control valve 120 toward the second position 124
thereby providing the down force eylinder 20 with sie fo
the supply conduits T8 and 128. Asa result, the free applied
by the down foreeeylinder 20 will increase until dhe desired
{ree is achieved
‘Once the desired down fore is reached, the ECU 96 will
terminate air flow to the down force eylinder 20. Specially,
the ECU 96 will transition the selection contra valve 136 40
the second position 140 which establishes Fi communic
‘ion between the conduits 134 and 100, The ECU96 will thea
transition the inflateexhaust valve 98 tothe second position
104 which facilitates ar low out of the pueumatie supply
cont 100, Consequently, pressure within the rod endo the
‘dovsa fogoe actuator 132 wl decreases ie exhausts from the
fctustor 132. As previously discussed, the decrease in air
pressure will drive the piston od ofthe aetuator 132 toward
the rod end, thereby inducing the down force contol valve
120 transition to the frst position 122 which blocks airflow
to the down force eylinder 20, Once the ECU 96 receives a
signal from the pressure sensor 112 that dhe pressure within
the rod end of the actuator 132 corresponds to a presse
indieative of the down force coateol valve 120 being in the
fit position 122, the ECU 96 will ansition the selection
control valve 136 to the first postion 138 which Blocks flow
‘o the pneumatic supply conduit 134. Consequently, pressure
‘within the actuator 132 wil be maintained, thereby blocking
air flow tothe down force eylinder 20. It should be appreci-
ated that transitioning the selection conto! valve 136 to the
‘sevond position 140 aod transitioning the inflateexbaust
valve 98 tothe first position 102 enables the pressure sensor
112 to measure the pressure Within therodend of the actuator
132,
As previously discussed, the down force actuator 132 isa
‘double acting eylinder having fluid connections to both the
rod end and the cap end. Consequently, in addition to eon-
‘wolling the setuator 132 by varying theair pressure within the
rex! end, a8 described above, the actuator 132 may be con-
trolled by varying the ar pressure within the cop end. Inthe
illustrated embodiment, pneumatic conduit 145 extends
between the depth control conduit 80 and the eap end ofthe
down fore actuator 132. In this configuration a valveassem-
bh: including the actuator 132 and the down force control
valve 120, facilitates automatic adjustment of the contact
US 9,215,837 B2
uw
Jorce between the yange wheels and the soil by varying the
pressure within the down force cylinder 20 based on ae pres-
sure within dhe dept control eylinders 44 and 68.
‘A desired penetration depth ofthe opener disks may be
‘established by varying the positon ofthe gauge wheels. Spe~
‘iially, pressure within the cap end of the depth contol
‘ylinders 44 and 68 may be adjusted to achieve the desired
lgnige wel position. However, sith the rw unit 16 in 2
seady state condition (eg. not moving, moving along &
substantially fst surface et), the pressure within the cap end
‘ofthe depth control cylinders 44 and 68 will remain substan-
tially constant. Consequently the pressure within the cup end
‘of the down force aetustor 132 will remain substantially
‘constant due tothe uid connection between the eylinders 44
and 68 and the actuator 132.Asaresult, while the ow unit 16
Jsina steady state condition, the down force may be regulated
asdeseribed above, ie, by varying pressure tothe rod enc of
the actuator 132, However, once the seletion contol valve
136s inthe fistpositon 138 such that ir ow to the rod end
‘of the actuator 132 is locked, any subsequent change to the 2
pressure within the eap end of the actuator 132 wil drive the
‘down force control valve 120 toward the second position 124
‘oF the third position 126,
Certain variations in the terrin may induce the gauge
‘wheels to move uprsanly relative to the opener disks. In sich,
4 situation, the ECU 96 or the linkage between the depth
‘contol valve 70 and the gauge wheel arm 40 may sutomati-
‘ally increase pressure tothe depth contol cylinders 44 and
68 to compensate, thereby maintaining the desired opener
‘disk penetration depth. However, inreasing pressure to the
‘ylinders 44 and 68 also increases the contact force between,
the gnuge wheelsand the sol. Aspreviously discussed, exces-
sive contact foree may result in compacted soil which
impedes the growth of seeds deposited within the soil. Con
sequently. the valve assembly may sulomatically reduce the
rc applied by the down foree cylinder 20 in response (oan
‘increase in pressure within the eylinders 44 and 68. In this
‘manner, the contact fore between the gauge wheels and the
soil may be maintained despite variations in the tein
For example, an inerease in pressure within the cap end of
the depth contol cylinders 4 and 68 will increase pressre
‘within the cap end ofthe dow force actuator 132 via thei
‘connection established by the pucumatic conduit 145, As wil,
be appreciated, the pressure increase within the cap endof the
‘etuslor 132 will drive the down force control valve 120
towant the third postion 126 that facilitates airflow from the
‘down force cylinder 20.As a result the force applied by the
‘ylinder 20 will decrease, thereby resulting ina reduced con-
tact force between the gauge Wheels and the soil. AS the
‘contact force decreases the pressure withinthe esp endof the
‘depth contol cylinders 44 and 68 will decrease. Conse
‘quently, the pressure within the cap end of the actuator 132,
will be ecluced, thereby transitioning the down force control
valve 120 back tothe first position 122 that blacks a lw to
the down fore cylinder 20. In this manner, the contaet force
between the gauge wheels and the soil may be automatically
‘maintained despite an increase in pressure within the depth
‘contol eylinders 44 and 68,
‘Conversely, certain conditions may induce the gauge
wheels to move downwardly relative to the opener disks. For
‘example, as the quantity of seed and/or ferlizer wikia the
row unit 16 decreases, the penetration depth of the opener
‘disks int the soil wll be reduced dhe to the derease in row
unit weight. To compensate, the depth contro valve 70 may
‘decrease pressure (0 the depth control eylinders 44 and 68,
thereby raising the gatige wheels elative to the opener disks
However, decreasing pressure to the cylinders 44 and 68 also
0
o
12
decreases the contact force between the gauge wheels and the
sil, I'he contact force isto low the opener disks may ise
cut of the ground, Consequently, the valve assembly may
‘omatically increase the force applied by the down foree
eylinder 20 in response tothe deerease in pressure within the
cylinders 44 and 68, In this manner, the contact force between
the gauge wheels and the soil may be maintained despite
variations in row unit weight.
For example, a decrease in pressure within the ep end of
the depth control eylinders 44 and 68 will decrease pressure
within the cap endof the down aree actuator 132 va the vid
‘connection established by the pneumatic conduit 148. As will
beappreciated the presse deeroase within thecap ead ofthe
‘aetutor 132 will drive the dosin forceconteol valve 12010 the
second position 124 that facilitates ar flow ino the eylinder
20 fiom the pneumatic conduit 128. As a result, the force
Applied by the eylinder 20 will increase, thereby resulting in
fan increased contact force hetwoen the gauge wheels and the
Soil. AS the contact force inereases, the pressure within the
‘ap end of the depth control cylinders 44nd 68 will increase,
(Consequently, the pressure within the cap end of the actuator
132 will rise, thereby irinsitioning the down Toree control
valve 120 hack othe frst position 122 that blocks i ow to
the down fore eylinder 20. In this manner, the contact force
‘between the gauge wheels andthe soil may be automaticaly
ined despite a decrease in pressure within the depth
‘control cylinders 44 and 68
As wll beappreciated, the down force actuator 132 may be
particularly configured to induce a desired degree of move-
‘met within the down foece contol valve 120 in response 10
variations in depth contol eyliner pressure. For example,
the length and/or width ofthe double noting cylinder may be
configured to achieve a desired dynamic response (ep
easel aisse ea teoueesunaa ener
In addition, the acwator 132 may include valves andior
springs configured tobias the piston to th eap end or the rod
end ofthecylinder, thereby establishing a desired relationship
between pressure and piston rod movement
‘The illstate ro init 16 also includes a blocking valve
146 configured to maintain pressure within the down force
cylinder 20 while the implement 10 js inthe non-working
position. As previously discussed, the tool bar 14 may’ be
fised above the ground at a hadland of a field such thatthe
ow units 16 disengsge the soil. In this uon-working position,
the implement 10 may be rotated atthe headland and aligned
‘with the next series of rows without the ow units 16 excavat-
ing trenches or depositing seeds within the headland. Main-
‘aining ar pressure within the down fore cylinder 20 while
‘the implement 10 is in the non-working postion ensures that
the davsn force will remain substantially unchanged when the
‘ow unit eengages the sol. As illustrated the blocking valve
146 includes first position 148 that facilitates ar flow the
down force eylinder 20, anda second position 180 that blocks
the airflow, Inthe present embodiment, the blocking valve
146 i actuated by the parallel linkage 18 coupled to the tool
bar 14. Consequently, when the tol bar 14 transitions to the
‘non-working positon, the Blocking valve 146 s driven tothe
second postion 150 which blocks air low: Conversely, when
the toolbar 1 is in the working postion, the Blocking valve
146 3s driven to the first positon 148 such that the pressure to
the down force cylinder 20 may be regulated as described
above,
‘nthe lusrated embodiment, therow unit #6alsoinchdes
1 pressure relief valve 182 in id communication with the
‘pneumatic conduit 130. In sis configuration, ifthe pressure
‘within thecap endof the cylinder 20 execeds a predetermined
level, the pressure relief valve 152 will open, thereby redne-
US 9,215,837 B2
13
Jing the pressure in the cylinder 20. For example, ifthe row
unit 16 encounters a rock or other obstruction in the sol, the
row unit 16 ill be driven upwardly. As a result air pressure
the cap end ofthe eylinder 20 wil inerease rapidly. In
sueh a situation, the pressure relief valve 182 will open,
thereby decreasing the pressurend substantially reducing oF
‘eliminating the possibilty of excessive wear of pneumatic
‘componeals. In alternative embodiments, the pneumatic
‘components may he particularly configured to resist pes>
sures associated with full upward displacement of the ow
unit 16. In such embodiments, the pressure relief valve 152
may be omitted
“The illustrated embostiment also includes a closing disk
hast valve 98, For example, an operator may input a desired
‘contact fore into the user interface 144, The user interface
1144 may then outpt a signal to the PCL 96 indicative of the
desires eontact force such that the ECU 96 adjusts the pres.
sure within the closing disk eylinder 0 to achieve the desired
Tore. In certain embodiments, the sensor assembly 97 my
be configured to measure a degree of soil compaction. For
‘example, the sensor asembly 97 may include a sol profile
sensor or other device capable of quantifying soil compaction
‘and outputting a signal indicative of soil compaction to the
ECU96, Altematively, acourseestimation of sileompaction
may be determined by measuring the pressure within the
down force eyinder 20, The ECU 96 may then compute the
“desired contact foree based on the degree of compaction. For
‘example, a large contact force may be applied to effectively
push dense ol imo the trench, while a relatively small con-
tact foree may be applied to closes trench within loose sol. In
this manne, the ECU 96 may automatically adjust air pres-
sure to the closing disk cylinder 80 based on the detected soil
‘compaction,
Inthe present configuration, the pressure within theclosing
«isk cylinder 50 is controlled by the selection control valve
186. As illustrated, the selection contol valve 186 is a two
positionwo way pneumatic valve, The fist position 188 is
‘configured to block air Now through the valve, while the
Second position 160 facilitates air low to the closing disk
‘vlinder 50, An electronic acnator 162 (eg, solenoid) rept
Jates the position of the selection control valve 186. The
‘elecieonie aemiator 162 is comsmnnicatively eoupled to the
ECU 96 which is configured to vary the positon of the selec-
tion contal valve 156 to achieve desired pressure within the
cylinder 50. Consequently, the ECU 96 may automatically
regulate the coniat force applied by the closing disk eylinder
50
‘The selection control valve 186 is fidly coupled to the
exhaust valve 98 via the pneumatic supply conduit
100. As previously discussed, the inlate/exhaust valve 98 is
three positioa/four way valve. The fist position 102 is con-
figured to block se flow between the paeumstie supply con
‘duit 100 and he pneumatie source, the second position 104s,
‘configured to ficiltate airflow out of the pneumatic supply
‘conduit 100, and the third position 106 sconfiguredto idly
‘couple the pneumatic source tothe pneumatic supply conduit
100. By adjusting the position of the inflate/exhats valve 98,
the ECU 96 may selectively provide air to the pneumatic
supply conduit 100, maintain air pressore within the pc-
malic supply conduit 100, or release air from the pneumatic
0
o
14
supply conduit 100, In tis configuration, the BCU 96 may
provide a desired pressure tothe closing disk cylinder $0 by
Aajusting the position of the inflateexhaust valve 98 via the
‘actuators 108 and 110.
For example, to increase pressure to the eap end of the
closing disk eylinder $0, the FCU 96 will activate the sale-
‘od 162, thereby driving the selection contro valve 156 10
the second position 160. The PCL 96 will then activate the
solenoid 110, thereby driving the inflate/exhaust valve 98 t0
the second postion 106, ln the second positon 106, ai irom
the pneumtie source Will fw into the pneumatic supply
‘oncuit 100, Wit the seletion congo valve 156 in the sec-
‘ond postion 160, ir from the pneumatic supply conduit 100
‘sill Mow through the valve 186 and the pncumatie conduit
154 tothe closing disk eylinder $0 until a desired pressure
within the cylinder 80 is achieved, as measured by the pres-
sre sensor 112. Next, the ECU 96 will nsteet the electronic
‘ctustor 162 o transition the valve 156 tothe frst position
158, thereby blocking airflow between the supply conduit
100 and the eylinder $0. Consequently, pressure within the
cap end of the cylinder $0 will be maintained at the desis
pressure.
Conversely, to decrease pressure within the cap end ofthe
closing disk eylinder $0, the FCU 96 will transition the selee-
‘ion control valve 156 to the second position 160 which
‘establishes fluid communication between the conduits 154
and 10. The ECU 96 will then transition the inflatetexhaust
valve 98 tothe second position 104 which fecilitates ar Now
‘ut the pneumatic supply condsit 100. Consequently, re
‘sre within the eap end of the closing disk cylinder 50 will
‘decrease as air exhaust fom the cylinder 50, Oe the ECU
96 receives a signal from the pressure sensor 112 that the
pressure within the cap endo the elosing disk cylinder SO has
relied a desired level, the ECU 96 will trasition he selee-
tion control valve 186 to te fist position 158 which blocks
ow to the pneumatic supply conduit 184, Consequently,
pressure within the closing disk eylinder 80 will be main-
‘ained, In this manner, the FCU 96 may automatically reg
late the cantact force applied by the closing disk cylinder 0
in response fo either operator input or detected soil compac-
tion, It should be appreciated that transitioning the selection
‘control valve 15610 the secon position 160 and transitioning
the inlatlexhaust valve 98 tothe fist position 102 enables
thepressure sensor 112 tomeasuee the pressure within thecap
fend of the closing disk cylinder 80,
‘In addition, the illustrated embodiment includes a press
wheel eylinder §6 configured to regulate a contact force
between the press whee! and the sil. As ilustrated, a paen-
‘matic supply conduit 166 extends between a cap end of the
evlinder 56 and a selection contol valve 168. Similar t0
‘adjusting the pressure within the closing disk cylinder 80, the
ECU 96 isconfigured to eyulate the pressure within the press
wheel evlinder $6 by operating the selection control valve
168 and the intakefexhaust valve 98. Por example, anoperator
‘may input a desired contact force into the user interface 144
‘The user interface 14 may then output signal tothe PCU 96
indicative of the desired contact force such thatthe ECU 96
adjusts the pressure within the press wheel cylinder 56 t0
‘achieve the desired Force. in erin embodiments, the sensor
assembly 97 may be configured fo measure soil moistore
‘content, For example, the sensor assembly 97 may include a
soil density sensor or other device capable of quantifying soil
‘moisture and outputting signal indicative of soil moistreto
the BCU96. In such embodiments, the ECU 96 may compute
‘the desired contact force based on the signal. Forexaample, ia
dy conditions, it may be desirable to firmly pack soil directly
‘over the seeds to seal in moisture, In damp condition
US 9,215,837 B2
15,
be desirable to leave the soil over the sew fel loose
‘onde to void compaction which may result in seed crusting,
In this manner, the ECU 96 may automtically adjust ait
pressure to the press whee! cylinder 86 based on the detected
Soil moisture level
Inthe present configuration, the pressure within the press
‘wheel cylinder 86 is controlled by the selection control valve
168. As illustrated, the selection contol valve 168 isa two
position/two way pneumatic valve. The fist positon 170 is
‘configured to block air flow through the valve, while the
Second position 172 Fisilitates air How tothe press whee)
‘vlinder 86. An electronic aeautor 174 (eg, solenoid) regu
Tates the position of the selection control valve 168. The
‘elecironie aemator 174 is comsmnaicatively eoupled to the
ECU 96 which is configured to vary the positon of the selec-
tion contol valve 168to achievea desired pressure within the
‘ylinder 56. Consequently, the ECU 96 may automatically
regulate the contact force appli by the press wheel eylinder
56
“The selection control valve 168 is fidly coupled to the
inflate/exhaust valve 98 vis the pneumatic supply condit
100. As previously discussed, the inlate/exhaust valve 98 is
the position/four way valve. The frst positon 102 is com-
figured to block ae flow between the pacumatie supply on-
‘duit 100 and the pneumatie source, the second positon 104 is
‘configured to ficiltate airflow out of the pneomatie supply
‘conduit 100, andl the third position 106 sconfiguredto idly
‘couple the pneumatic source to the pneumatic supply conduit
100. By adjusting the position of theinflate/exhats valve 98,
the ECU 96 may selectively provide air to the pneumatic
supply conduit 100, maintain air pressure within the p=
malic supply conduit 100, or release air from the pneumatic
supply conduit 100, In this configuration, the ECU 96 may
prove a desired pressure to the press wheel cylinder 6 by
adjusting the position ofthe inflatelexhast valve 98 via the
‘setuators 108 ad 110,
For example, o increase pressureto the capend ofthepress
‘wheel eylinder $6, the ECU 96 will activate the solenoid 174,
thereby driving the selection contr valve 168 tothe socond
position 172, The ECU96 will thea ativate the solenoid 110,
thereby driving the inflatelexhaust valve 98 to the second
Position 106. In the second positon 106, air from the pnet-
‘matic source will low into the pneumatic supply conduit 100.
With the selection control valve 168 in the second position
172, si from the pneumatic supply conduit 100 will flow
through the valve 168 and the pneumatic conduit 166 to the
press wheel eylinder $6 unl desired pressure within the
‘ylindor 86 is achieved, as measured by the pressure sensor
112. Next, the ECU 96 will instruct the electonie actuator
174 to wansition the valve 168 to the fist postion 170,
thereby blocking ar low between the supply conduit 100 and
the eylinder $6. Consequently, pressure Within the cap end oF
the cylinder 86 will be msinined atthe desired pressure.
‘Conversely, to decrease pressure within the eap end ofthe
press whee! cylinder $6, the ECU 96 will ransition the ele
fion control valve 168 to the second position 172 which
‘establishes uid communication hetween the conduits 166
and 100. The ECU 96 will then transition the nflatefexhaust
valve 98 the second position 104 which faeiltates air low
‘outof the pneumatic supply conduit 100, Consequently, pres-
sure within the cap end of the press wheel eyliner 56 will
‘decrease as sir exhausts from the eylinder 86. Once the BCU
‘96 receives a signal from the pressure sensor 112 tht the
pressure within the cap end ofthe press wheel cylinder S6 has
reached. desired level, the FCU 96 wil transition the selee-
tion control valve 168 tothe fist position 170 which blocks
flow to the pneumatic supply conduit 166. Consequently,
0
o
16
pressure within the press wheel eylinder $6 will be maine
fained, In this manner, the ECU 96 may automaticaly roa
Jate the contact force applied by the press wheel cylinder $6 in
response to either operator input or detected soil moistre!
‘density. I should be appreciated that transitioning the selee-
tion contra valve 168 tothe second position 172 and tran
‘ioning the inflatelexhaust valve 98 fo the frst position 102
cnibles the pressure sensor 112 to measure the pressure
‘within the eap end ofthe press whee eylinder 56
‘The illustrated embodiment also includes a residue man-
ager cylinder 64 configured (0 regulate a eontact force
between the residue manager and the soil, As ilustated,
ppeuniatie supply conduit 178 extends between a cap end of
the eylinder 64 and a seletion contol valve 180. Similar to
adjusting the pressure within the closing disk cylinder $0, the
ECU 96 is configured to regulate the pressure within the
reside manager eylinder 64 by operating the selection con-
trol valve 180 and the intakelexhsust valve 98, For example,
aan operator may input a desired contat free into the user
interlace 144. The utr interface 144 may then oulputasignal
tothe PCU 96 indicativeof the desired contact force such that
the ECU 96 adjusts the pressure within the residue manager
cinder 64 to achieve the desired fore. In erin embodi-
‘ments, the Sensor assembly 97 may be configured to meastre
percentage of residue cover: For example the sensor assem-
bly 97 may include an optical sensor or ther device cspable
‘of quantifying residue cover and outputting a signal indica-
tive of residue coverage percentage to the ECU 96. In such
embodiments, the FCU 9% may compute the desired contact
orce based on the signal. For example, ithe residue cover is
greater than the desired percentage, the ECU 96 may increase
contact force. Conversely, ifthe residue covers es than the
‘desired percentage, the FCU 96 may decrease contact force.
In this manner, the ECU 96 may automatically adjust air
pressure fo the residue manager cylinder 64 based on the
Gatected residue coverage percentage,
Inthe present configuration, the pressure within the residue
manager cylinder 64 is controlled hy the seletion contol
valve 180, As illustrated, the selection contol valve 180 is a
‘0 position/two way pneumatic valve. The first positon 182
fs configured to block air How thrgh the vale, while the
second position 184 ficlitatesair low tothe residue manager
cvlinder 64. An electronic actuator 186 (eg. solenoid) regu-
Jates the position of the selection conteol valve 180. The
clecirnic actuator 186 is communicatively coupled to the
ECU 96 which is configured to vary the positon ofthe selee-
‘ion contol valve 180 o achieve a desired pressure within the
cylinder 64, Consequently, the FCU 96 may automatically
regulate the contact foree applied by the residue manager
cylinder 64
The selection control valve 180 is fluidly coupled to the
inflatefexhaust valve 98 via the pneumatic supply conduit
100. As previously discussed, the infate‘exhaust valve 98 is a
three position/Tour way valve, Te frst position 102 is con-
Tigurad to block ae low between the pacumatic supply con-
dat 100 andthe pnewmatie soure, the second positon His
‘configured to Titre air ow our of the paeomatie supply
ceoncuit 100, andthe thie positon 106 is configured to tuidly
‘soup the peumatie source to the pneuatie supply cot
100. By adjusting the position ofthe inilatelexhaust valve 98,
the ECU 96 may selectively provide ai to the pneumatic
supply conduit 100, maintain air pressure within the poeu-
‘matie supply conduit 100, of release aie from the pneumatic
supply conduit 100. In this configuration, the ECU 96 may
provide a desired pressure tothe residue manager elinder 64
by adjusting the position ofthe iniatlexhaust valve 98 vi
the actuators 108 aad 110,
US 9,215,837 B2
17
For example, 1 increase pressure to the cap end of the
residue manager eylinder 64, the ECU 96 will setivate the
solenoid 186, thereby driving the selection control valve 180
to the second positon 184, The ECL 96 wll duen activate the
solenoid 110, thereby driving the inflaelexhaust valve 98 10
the second postion 106. In the second positon 106, sr rom
the pneumatic source will flow into the poeumatic supply
‘conduit 100, With the selection contol valve 180 in the sex
‘ond position 184, ar from the pneumatic supply conduit 100,
will low through the valve 180 and the paeumatie conduit
178 othe residve manager cylinder 64 until a desired pres
sure Within the eylinder 64 is achieved, as measured by the
pressure sensor 112, Next, the ECU 96 will instruct the elec-
Tronic actuator 186 to transition the valve 180 to the lst
Position 182, thereby blocking airflow between the supply
‘conduit 100 and the cylinder 64. Consequently, pressure
within hecap end ofthe cylinder 64 will be maintained atthe
desired pressure
Conversely, to decrease pressure within the cap end ofthe
residue manager eylinder 64, the ECU 96 will ansiion the
scletion contol valve 180 1 the second position 184, which
‘establishes fluid communication between the conduits 178
‘and 100, The ECU 96 will then transition the iflatelexhaust
valve 98 tothe second position 104, which ficlitates ar flow
‘outof the pneumatic supply conduit 100, Consequently pres
sure within the cap end of the residue manager eylinder 64
Will decease as air exhausts from the eylinder 64, Once the
CU 96receivesasignal from the pressure sensor I 12 thatthe
pressure within the cap end of the residue manager cylinder
{4 has reached a desired Level, the ECU 96 will rasition the
scletion conteol valve 180 to the frst postion 182 which
blocks fear to the pneumatic supply conduit 178, Conse-
“quently, pressure within the residue manager eylinder 64 wil,
bbemaintined,Inthis manner, the BCU 96 may automatically
regulate the contact foree applied by the residue manager
‘ylinder 64 in response to either operator inp or detected
reside cover. It should be appreciated that transitioning the
scletion control valve 180 fo the second position 184 and
transitioning the inflatetexhaust valve 98 tothe fist position
102 enables the pressure sensor 112 to measure the pressure
“within the eap end of the residue manager eylinder 64
Inthe illuseated embodiment, the implement 10 includes 2
‘manual backup system 188 configured to faiitte manual
‘control of te pneumatic eylinders 20,44, 80,56, 64 und 68a,
theevent ofanelectical failure. While the backup system 188
js described as “mana,” i should be appreciated that pees
sure regulation within the down force eylinder 20 and the
depth contol cylinders 44 and 68 will remain automatic, as
described above. In the present embodiment, the manual
backup system 188 enables an operator to adjust the pressure
to exch evlinder via a series of pressure regulators. As ilus-
trated, the manual backup system 188 includes a mode select
valve 190 configured to automatically ativate the backup
system 188 duringan electrical flue. Inthe present embodi-
met, the mode select valve 199 isa two posiionithree way
Peumatic valve. The first position 192 is configured 10
‘enable arto flow out of a pilot conduit 194, while the second,
positon 196 facilitates aie Now into the pilot condit 194 Irom
the pocumatic source. An electronic actuator 198 (e, sole-
noid) regulates the position of the mode select valve 190.
While electrical power is supplied to the actuator 198, the
‘etuator 198 holds the valve 190 in the second position 196
such that air is provided othe pilot conduit 194 In the event
‘ofan cleicca failure, dhe mode select valve 190 will tans
tiomto the ist position 192 such tat the ar exhausts fom the
pilot conduit 194,
0
o
18
Also in the illustrated embodiment, the pilot conduit 194s
in Buid communication with a series of actuators configured
{o contr operation of a corresponding series of election
‘control valves. Ifthe pilot conduit 194 is pressurized with the
air flow fom the pneumatic source, the selection contol
valves will romain closed, thereby disabling the manval
‘backup systom 188. Hovsever, in the event of an electrical
failure, the mode select valve 190 will fclitate sie low out of |
the pilot conduit 194, thereby inducing the selection contol
valves to activate the manal backup system 188, Furber-
‘mor, an eletrcal failure will indace the selection contol
valves 88, 136, 156,168 ad 180 to runsition to thei respec-
tive fist postions, thereby disabling automatic contol of the
evlinders 20, 44, $0, $6, 64 and 68.
ach selection contol valve 88, 136, 156, 168 and 180
‘configured to facilitate automatic eontol ofthe cylinders 2,
444, 50, 56, 64 and 68 has a corresponding selection control
valve associated with the manual backup system 188. For
‘example, a first selection control valve 200 is in fluid com-
‘munication with the pneumatic conduit 86 attached to the
seletion control valve 88 which regulates operation of the
depth control cylinders 44 and 68. The frst selection contol
valve 200 includes a first position 202 configured to facilitate
‘ir ow through the valve, ancl second position 204 eontig-
red to block ai flow: A pneumatic aetiator 206 coupled to
the valve 200 varies the position of the first selection contol
valve 200 based on ar pressure within the pilot conduit 194
Specially, the actuator 206 is configured co taasition the
fit selection control valve 200 to the fist position 202 if air
pressure is exhausted from the pilot conduit 194, In this
‘configuration, an electrical faire will induce the selection
fcanirol valve 88 to transition to the frst position 90 which
blocks the flow of air, and will induce the fist selection
‘control valve 200 to transition tothe frst positon 202 which
facilitates air How through the valve. Consequently, an elee-
‘ical flue will disable automatic contol ofthe depth con:
trol cylinders 44 and 68, while enabling manval conto
‘Similarly second selection contol valve 208 is in vid
communication with the pacumatie condnit LM attached to
the selection control valve 136 which regulates operation of
the down force eylinder 20. The second selection control
valve 208 neludes a first position 210 configured to facilitate
air low through the valve and. second position 212 conig-
ured t block ar low. A paeumatie actuator 214 coupled 10
the valve 208 varies the postion of the second selection
control valve 208 based on ar pressure within the pilot con-
uit 194 Specifically the actuator 214 is configured to tran-
sition the second selection contol valve 208 othe fest
tion 210 if air pressure is exhausted from the pilot eonduit
194. Inshis configuration, an electrical failure will induce the
selection control valve 136 to transition to the frst position
138 which blocks the flow of ar, and will induce the second
seletion control valve 208 wo transition to the first position
210 which facilitates ai flow through the valve. Conse-
‘quently, a electrical eile will disable automatic conta of
the down foreeeylinder 20, while enabling manual conto
In addition, a third selection control valve 216 is in Mid
‘communication with the paenmatie conduit 154 attache! t0
the selection control valve 186 which regulates operstion of
the closing disk eylinder $0. The third selection contr valve
246 includes fst position 218 coafigured to facilitate air
flow through the valve, and a second position 220 configured
{o block air flow. A pneumatic actuator 222 coupled to the
valve 216 varies the position of the third selection control
valve 216 based on ar pressure within the pilot conduit 194
Specifically, the actuator 222 is configured to transition the
‘third selection contol valve 216 tothe ist position 218 far
US 9,215,837 B2
19
pressure is exhausted from the pilot conduit 194. In this
‘configuration, an electrical failure will ince the selection
‘contol valve 186 fo transition wo the first postion 158 whieh
blocks the flow of air, and will induce the third selection
‘contol valve 216 o transition to the first position 218 which
facilitates air low through the valve. Consequently, a elec-
trical failure will disable automatic controlof the closing disk
‘jlinder 50, while enabling manta conta
urthermore, fourth selection contro vive 224s in uid
‘communication with the pneumatic conduit 166 attached to
the selection control valve 168 which regulates operation of
the press wheel cylinder $6. The fourth selection control
valve 224 includes frst position 226 configured to facilitate
airflow through the valve, and a second position 228 config
ured t block ae flow. A pneumatic actuator 230 coupled to
the valve 224 varies the position of the fourth selection on
teol valve 224 hased on air pressure within the pot conduit
194. Specifically the actuator 230 is configured to transition
the fourth selection contr valve 224 othe first position 226
iar pressure i exhausted fom the pilot conduit 194, In this
‘configuration, an electrical failure will inde the selection
‘control valve 168 to transition to the first postion 170 whieh
blocks the flow of air, and will induce the fourth selection
‘control valve 224 to transition to the first position 226 whieh
facilitates ar low through the valve. Consequently, an elec-
tecal failure will disable automatic contol ofthe press whee]
‘vlinder 86, while eoabling manual contol
In addition, a ith selection contol valve 282 is in uid
‘communication with the pneumatic conduit 178 attached to
the selection control valve 180 which regulates operation of
the residue manager cylinder 64. The fith selection control
valve 232 includes frst position 234 configured to facilitate
low through the valve, anda second position 236 config-
ured t block ar low. A pneumatic aetuator 238 coupled 10
the valve 232 varies the position ofthe filth selection control
valve 232 based on air pressure within the pilot conduit 194
Spocfially, the actuator 238 is configured to transition the
‘th seletion contol valve 282 to the fist position 234 if aie
pressure is exhausted from the pilot conduit 194. In this
‘configuration, an eleticalfilure will induce the selection
‘contol valve 180 to transition to the first position 182 which
blocks the flow of ait, and will induce the fifth selection
‘control valve 232 o transition to Us first position 234 which
Facilitates ar low through the valve. Consequently, an elee-
tecal failure will disable automatic contol of the residue
‘manager cylinder 64, while enabling manval cone
‘With each selection control valve 200, 208, 216, 224 and
232 inthe frst position, a flow path established between the
pneumatic conduits 86,134, 184, 166:and 178 and respective
pressure rezulstors. By adjusting ai ow through each pres-
sure regulator, pressure within theeylinders 80, $6, 64, 84 and
132 may be manually controlled. As illusteated, frst pres-
sure regulator 240 is fluidly coupled to the first selection
‘contol valve 200, and configured to recsive an ar flow fom
the pneumatic source. Consequently. when te fist selection
‘contol valve 200 is in the first position 202, the first pressure
regulator 240 may vary the flow of air from the pneumatic
source tothe conduit86 thereby adjusting the pressure within
the depth conteol cylinders 44 aad 68 via operation of the
sctuator 84 In the present embodiment, fist pressure gauge
242 is coupled to the conduit 86 downstream from te fst
‘election control valve 200 In ths configuration, an operator
‘may vary te pressure within the eonduit 6 by adjusting the
first pressure regulator 240 until a desired pressure is shown
‘onthe frst pressure gauge 242
In additinn, a second pressure regulator 244 is Suidly
‘coupled tothe second selection control valve 208, and con
0
o
20
figured to receive an air fw from the pacumatic source
Consequently, when the second selection control valve 208 is
in the fist position 210, the second pressure regulator 244
‘may vary the flow of air from the pneumatic sonree to the
‘conduit 134, thereby adjusting the pressure within the down
{ree eylinder 20 via operation of the actuator 132. In the
present embodiment, second pressure gauge 246 is coupled
fo the conduit 134 downstream from the second selection
control valve 208. In this configuration, an operator may’ vary
the pressure within the conduit 134 by adjusting the second
pressure repulator 244 until a desired pressireisshovwn onthe
Sovond pressure gauge 246,
ressure regulator 248 is fluidly
fon control valve 216, and config-
‘ured to receive an airflow from the pneumatic source, Con-
sequently, when the third selection contro valve 216 sin the
fist positon 218, the third pressure regulator 248 may vary
the flow of ar fom the pactimatic source to the conduit 184
thereby adjusting the pressure within the closing disk eylin-
{der 80, Lathe present embodiment, third pressure gauge 250
js coupled to the conduit 184 downstrsam from the third
section control valve 216, In this configuration, an operator
‘ay vay the pressure within the conduit 154 by adjusting the
‘third pressure rgulstor 248 until a desired pressures shown
‘on the third pressure gauge 250,
The manval backup system 188 also includes a fourth
pressure rezulstor 252 fluidly coupled to the fourth selection
‘control valve 224, and configured to receive an air low from
the pneumatic source. Consequently; when the fourth selec-
‘ion control valve 224 i in the first position 226, the fourth
pressure regulator 282 may vary the flow of air from the
reumatie source to the conduit 166, thereby adjusting the
pressure within the press wheel cylinder 56. In the present
embodiment, a fourth pressure gauge 254 is coupled to the
‘conduit 166 downstream from the fourth selection control
valve 224. In this configuration, an operator may vary the
pressure within the conduit 166 by adjusting the fourth pre
sure regulator 252 until a desied pressure is shown on the
ourth presse gage 254
Inadlton,a fit pressure regulator 256s fuidy coupled
to the fifth selection control valve 232, and configared to
receive anair flow from the pneumatie souree. Consequently,
‘whe the fillh selection contol valve 232 isin the first pos
‘ion 234, the ith pressure regulator 286 may vary the ow of
sir from the pneumatic source tothe conduit 178, thereby
‘adjusting the pressure within the residve manager cylinder
(64 In the present embodiment, a fifth pressure gage 258 is
‘couple to the conduit 178 dossnstream from te fifth slee-
tion control valve 232. In this configuration, an operator may
vary the pressure within theconduit 178 by adjusting the ith
pressure regulator 256 until a desired pressure isshowaton the
Tith pressure gauge 258. Because the pressure within each
cylinder 20, 44, 50, 86, 64 and 68 may be adjusted by the
pressure rogulators 240, 244, 248, 252 and 256, the hackup
system 188 may foelitae manual contol of the row unit 16a
the event ofan electrical eile
FIG. 4a schematic diagram of an altemative pneumatic
system configured to sutomsaically equalize a contact force
‘fapress wheel and a pauge whee. [nthe illustrated embodi-
‘meat, a pneumatic conduit 260 extends between the conduit
148 and a tandem press whee! valve 262, As ilustated, the
tandem press whee! valve 262 is a two postion three way
pneumatic valve The first position 264 is configured fai
fate air low from the pneumatic conduit 166 tos cont 266
in Muid communication with the cap end of the press wheel
cylinder6, while blocking ir Bow Irom the condit 260, The
second position 268 blocks ar flow from the conduit 166 10
US 9,215,837 B2
2
the conduit 266, while establishing @ Aid connectir
between the conduit 260 and the conduit 266, An electronic
actuator 270 (eg. solenoid) regulates the postion of the
tandem press wheel valve 262. The electronic actuator 270 is
‘communieatively coupled to the ECU 96 which is configured,
to vary the position ofthe tandem press wheel valve 262 ia
response fo operator input (et, through the user interface
148),
‘While the tandem press whe! valve 262 sin the lstrated
first postion 264, sir may flow from the selection control
valve 168 tothe press whee eylinder 86 via the conduits 166
‘and 266. Ia this configuration, the ECU 96 may regulate the
pressure within the cylinder 56 via operation of the selection
‘contol valve 168 and the iflatelexhaust valve 98, However
to equalize a contact force of the press whee! and the gauge
wheels, the operator may input a command into the user
‘merface 144 insiructng the BCU 96 to transition the tandem
press wheel valve 262 tothe second position 268, As prvi-
‘ously discussed, the second postion 268 blocks air low from
the conduit 166, while facilitating air Now Irom the conduit
260. As a result, the ECU 96 will not be able 10 regulate
pressure within the press whee! eylinder $6. Instead, pressure
‘will be adjusted based on presse within the dep contol
‘ylinders 44 and 68,
With the tandem press wheel valve 262 in the second
position 268, a fuid connection is established between the
‘depth contol eylinders 44 and 68 and the press whol cylin:
‘der 86, Specially, st may low frome evinders 4nd 68
through the conduits 80,148, 260 and 266 to the press whool
cylinder 56, In this manner, the contact force between the
‘2nige wheels and the ground may be balanced with the con-
tact force between the press wheel and the ground. For
‘example, certain variations in the termin may induce the
auge wheels fo move upwardly relative tothe opener disks.
Insuch a situation, pressure will increase within the cap end
‘ofthe depth contol eylinders 44 and 68. The increased pres
sure will establish an airflow from the eylinders 44 and 68 0
the press wheel eylinde 56, thereby driving the press wheel
‘downwardly. The downward motion ofthe press whee! wil,
‘dive the row unit 16 upwardly, thereby decreasing the con-
tact force between the gauge wiels and the sol. As a result
the pressure within the eap end ofthe depth control cylinders
44 and 68 will decrease, thereby restoring the pressure
between cylinders fo equilibrium. Consequeatly, the contact
ore ofthe gauge wheels and the press wheel will be eal
ined, which may substantially reduce row unit vibration in
response fo contact with obstructions in the soi
Conversely, certain variations inthe terrain may induce the
press hie! to move upwarlly relative to the rw unit chassis
Insucha situation, pressure will increase within the cap end
‘of the press wheel cylinder $6, The increased pressure wil,
‘establish an airflow from the eylinder 86 to the depth contol
‘vlinders 4 und 68, Uaereby driving the gauge wheels down-
‘vardly. The downward motion ofthe gage wheels will drive
the row unit 16 upwardly, thereby decreasing the contact
oree between the press whee! and the soil, As a result, the
pressure withinthe cap end of te press wheel cylinder $6 will
‘decreas, thereby restoring the pressure between cylinders to
‘equilibrium. Consequently, the contact force of the gauge
wwhools and the press whos! will he equalized, which may
Substantially eddee ow unit vibration in response fo contact
‘with obstructions in the sol
FIG, 5 isa schematic diagram of an alternative manval
backup system 272 configured to facilitate manual contro of
the pneumatic system. Specifically, the ilustrated manual
backup system 272 enables an pertor to contol the p=
matic eylinders 20,44, 0, $6, 64 and 68 in the event of an
0
o
2
electrical failure via a series of pressure regulators. sills
twated, the manual backup system 272 includes a series of
selection contro valves lnwing electronie actuators eonig-
‘redo transition the valves to an open position inthe event oF
‘an elotica failure, In this manne, the maval backup Sy3-
tem 272 may be activated without the use of the mode selee-
‘ion valve 190 and pilot system deseribed above. Similar to
the embodiment described wih reference 1o FIG. 3, an elec-
‘rca flue will also induce the selection control valves 88,
136, 186, 168 and 180 to ansiton to their respective fist
positions, thereby dissbling automatic contol of the cylin-
Gers 20,44, 50, 86, 64 and 68.
Inthe hutated embodiment, each seletion contol valve
88, 136, 156, 168 and 180 has a comesponding selection
centro! valve associated withthe manual backup system 272
For example, first selection control valve 274 isin foil
‘communication with the pneumatic conduit 8 attached tothe
selection control valve 88, which regulates operation of the
depth conteo cylinders 44 and 68. The first selection contol
valve 274 includes a it positon 276 configured to facilitate
fir low through the valve and. second position 278 config-
‘red 1 block aie flow. An electronic aentator (e.g, solenoid)
280 coupled to the valve 274 varies the postion of the frst
‘scletion control valve 274 based on application ofeletecal
power Specifically, while electrical power is supplied to the
fctuator 280, the actuator 280 holds the valve 274 in the
second position 278 which blocks air ow through the valve
274. Tn the event of an electieal flue, the selection contol
valve 88 will transition tothe first position 90 which blocks
the flow of air, and the first selection control valve 274 will
transition to the fist position 276, which facilitates air Now
‘through the valve. Consequently, an electrical faite will
sable automatic control of the depth contol cylinders 44
‘and 68, hile enabling manual eontol
‘Similarly «second selection control valve 282 isin uid
‘communication with the pneumatic conduit 134 attached 10
the selection contro valve 136 which regulates operation of
the down foree cylinder 20. The second selection contol
valve 282 includes a first position 284 configured to facilitate
air flow through the valve, anda second positon 286 contig
‘ured to block ir low: An electronic actiator (e.g, solenoid)
28 coupled to the valve 282 varies the position ofthe second
selection contol valve 282 based on application of eleteical
power Specifically, while electrical power is supplied to the
‘atuator 288, the actualor 288 holds the valve 282 in che
‘second postion 286 which blocks ai fa through the valve
282. Inthe event ofan electrical flue, the selection contol
valve 136 will transition othe fist position 138 which blocks
the low of sie and the second selection control valve 282 will
transition tothe fist positon 284, which facilitates air Nowe
through the valve. Consequently, an electrical failure will
disable automatic contol ofthe dovsn forceeylinder 20, while
enabling manval conto
‘In adliton, a third selection control valve 290 is in fuid
‘communication withthe pneumatic conduit 184 attached 10
the selection control valve 186 which regulates operation of
the closing disk cylinder $0. The thir selection contro valve
290 inchudes a fist position 292 configured to facilitate air
‘low through the valve, and a second position 294 configured
to block ar flow: An electonic aetustor (e, solenoid) 296
coupled to the valve 290 varies the position of the third
seletion contol valve 290 base! on application of electrical
power Specifically, while electrical power is supplied to the
‘actuator 296, the actuator 296 holds the valve 290 in the
second position 294 which blacks air fw through the valve
290 In the event ofan electrical flue, the selection contol
valve 186 wll transition othe fist position 18 which blocks
US 9,215,837 B2
23
selection control valve 290 will,
transition to the fist position 292, which facilitates air low
through the valve. Consequendy, an electrical fillure will
disable automatic control of the closing disk cylinder 50,
‘while enabling mannal contol
Punhermore fourth selction contro valve 298s in fi
‘communication with the pneumatic conduit 166 attached to
the selection control valve 168 which regulates operation of
the press whee! cylinder 56. The fourth selection control
valve 298 includes a first position 300 conligured to fciitate
sie low through the valve, and a secoud position 302 contig
ured to Block air Mo. Aa electronic acnator (eg, solenoid)
304 coupled tothe valve 298 varies the position of the fourth
‘cletion control valve 298 based on application of electrical
power. Specifically, while electrical power is supplied to the
‘etuator 304, the actuator 304 holds the valve 298 in the
second postion 302 which blocks air flow through the valve
208, In the event of an electrical flue, the selection control
‘valve 168 will transition tthe ist positon 170 which blocks
the low of si, ad the fourth selection control valve 298 will
transition to the fist positon 300, which facilitates ar low
through the valve. Consequently, an electrical failure will
disable automatic contol of the press wheel cylinder 56,
hile enabling manual contol
In addition, a fifth selection contol valve 306 is in Mid
‘communication with the pneumatic conduit 178 attached to
the selection control valve 180 which regulates operation of
the residue manager cylinder 64, The filth selection contol
valve 306 includes a first position 308 configured to facilitate
slow through the valve, and a second position 310 contig
tured to block sir flaw. An electronic actiator (eg, solenoid)
$312 coupled tothe valve 306 varies the position ofthe fifth
‘cletion control valve 306 based on application of electrical
power. Specifically, while electrical power is supplied to the
fsctuator 312, the actuator 312 holds the valve 306 in the
‘Second postion 310 which blocks air ow through the valve
306. Inthe event ofan electrical failure, the selection control
valve 180 will transition tothe ist position 182 whic blocks
the How of ai, and the fifth selection contol valve 306 will
teanstion 10 the first positon 308, which feilitates aie low
through the valve. Consequently, an electrical failure will
Vous aimerez peut-être aussi
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Fan Performance CurveDocument4 pagesFan Performance CurvemuddogPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Fan Performance Characteristics of Centrifugal Fans Fe 2400Document4 pagesFan Performance Characteristics of Centrifugal Fans Fe 2400Mohammed AbdalrhmanPas encore d'évaluation
- A Hand Book For The Mechanical Designer Ventilation Duct FanDocument107 pagesA Hand Book For The Mechanical Designer Ventilation Duct Fanrawneeh100% (6)
- Ball Mill OptimizationDocument7 pagesBall Mill OptimizationWael Fanous100% (1)
- Rotary Kiln - Refractory Lining InstallationDocument41 pagesRotary Kiln - Refractory Lining InstallationNael94% (16)
- Ask DR. CLARK - OdtDocument50 pagesAsk DR. CLARK - Odtmauryaraj200750% (2)
- Bag Filter Design CalculationsDocument2 pagesBag Filter Design CalculationsSnehendu Biswas69% (13)
- Seed Inductor For An Agricultural Implement Having An Air Bypass ChannelDocument12 pagesSeed Inductor For An Agricultural Implement Having An Air Bypass ChannelMohammed AbdalrhmanPas encore d'évaluation
- Us 9215842Document8 pagesUs 9215842Mohammed AbdalrhmanPas encore d'évaluation
- Seed Inductor For An Agricultural Implement Having An Adjustable Air BypassDocument15 pagesSeed Inductor For An Agricultural Implement Having An Adjustable Air BypassMohammed AbdalrhmanPas encore d'évaluation
- Agricultural Apparatus With Hybrid Single-Disk, Double-Disk Coulter ArrangementDocument28 pagesAgricultural Apparatus With Hybrid Single-Disk, Double-Disk Coulter ArrangementMohammed AbdalrhmanPas encore d'évaluation
- Printed Circuit Board Production Apparatus and Printing MachineDocument1 pagePrinted Circuit Board Production Apparatus and Printing MachineMohammed AbdalrhmanPas encore d'évaluation
- Agricultural Apparatus With Hybrid Single-Disk, Double-Disk Coulter ArrangementDocument1 pageAgricultural Apparatus With Hybrid Single-Disk, Double-Disk Coulter ArrangementMohammed AbdalrhmanPas encore d'évaluation
- Georgia: European Patent Office - World Wide Database Coverage Report July 2011Document1 pageGeorgia: European Patent Office - World Wide Database Coverage Report July 2011Mohammed AbdalrhmanPas encore d'évaluation
- Sustainable Technologies Brochure enDocument13 pagesSustainable Technologies Brochure enMohammed AbdalrhmanPas encore d'évaluation
- Australia CementDocument26 pagesAustralia CementMohammed AbdoPas encore d'évaluation
- Patents Clean Energy Technologies in Africa enDocument90 pagesPatents Clean Energy Technologies in Africa enMohammed AbdalrhmanPas encore d'évaluation
- Paper D: European Qualifying Examination 2011Document11 pagesPaper D: European Qualifying Examination 2011Mohammed AbdalrhmanPas encore d'évaluation
- 2011 PaperA Elec-Mech enDocument19 pages2011 PaperA Elec-Mech enMohammed AbdalrhmanPas encore d'évaluation
- Environmental Statement 2010 enDocument42 pagesEnvironmental Statement 2010 enMohammed AbdalrhmanPas encore d'évaluation
- Dispersant,: (A) Publication in OJ (B) (XI To Chairmen and Members (C) To Chairmen (D) No DistributionDocument13 pagesDispersant,: (A) Publication in OJ (B) (XI To Chairmen and Members (C) To Chairmen (D) No DistributionMohammed AbdalrhmanPas encore d'évaluation
- CentrifugalSWPerf SupplementDocument92 pagesCentrifugalSWPerf SupplementYYo YudiPas encore d'évaluation
- Us 8850234 PatentDocument27 pagesUs 8850234 PatentMohammed AbdalrhmanPas encore d'évaluation
- Us 8850234 PatentDocument27 pagesUs 8850234 PatentMohammed AbdalrhmanPas encore d'évaluation
- Aufheizung Monolithischer Feuerfestprodukte E.163Document2 pagesAufheizung Monolithischer Feuerfestprodukte E.163Mohammed AbdalrhmanPas encore d'évaluation
- Processing Instructions V 15.0 Refraprotect Ca and CMDocument2 pagesProcessing Instructions V 15.0 Refraprotect Ca and CMMohammed AbdalrhmanPas encore d'évaluation
- Aufheizvorschrift A12 M L 10 2014.162Document1 pageAufheizvorschrift A12 M L 10 2014.162Mohammed AbdalrhmanPas encore d'évaluation
- 9-22 Prietl PDFDocument14 pages9-22 Prietl PDFSatria PurwantoPas encore d'évaluation