Vous aimerez peut-être aussi
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2D'EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Pas encore d'évaluation
- 110 Waveform Generator Projects for the Home ConstructorD'Everand110 Waveform Generator Projects for the Home ConstructorÉvaluation : 4 sur 5 étoiles4/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1D'EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Évaluation : 2.5 sur 5 étoiles2.5/5 (3)
- DC Motor Speed Control System - ED4400BDocument14 pagesDC Motor Speed Control System - ED4400BDanang Pradika Purnomo100% (1)
- Drives and Control Lab ManualDocument36 pagesDrives and Control Lab ManualKabilanPas encore d'évaluation
- THESISDocument44 pagesTHESISRowena Shaira AbellarPas encore d'évaluation
- Alum Rosin SizingDocument9 pagesAlum Rosin SizingAnkit JainPas encore d'évaluation
- Dark Elves WarbandDocument9 pagesDark Elves Warbanddueydueck100% (1)
- Synchronous Motor Test TestDocument5 pagesSynchronous Motor Test TestChidamparam PalaniyappanPas encore d'évaluation
- Microbiology QuestionsDocument5 pagesMicrobiology QuestionsNaeem AminPas encore d'évaluation
- Variable Speed AC Drives with Inverter Output FiltersD'EverandVariable Speed AC Drives with Inverter Output FiltersPas encore d'évaluation
- No Load and Block Rotor Test: Premier Trading CorporationDocument11 pagesNo Load and Block Rotor Test: Premier Trading CorporationKsr Akhil100% (1)
- INERT-SIEX 200-300 IG-100: Design ManualDocument54 pagesINERT-SIEX 200-300 IG-100: Design ManualSaleh Mohamed0% (1)
- Practicas Digiac 1750 1Document18 pagesPracticas Digiac 1750 1Saga Adolfo GonzalezPas encore d'évaluation
- Ec221 Lab04 PDFDocument5 pagesEc221 Lab04 PDFishara karunarathnaPas encore d'évaluation
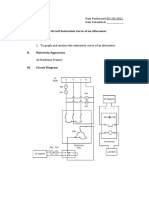
- Open Circuit Saturation Curve of An Alternator I. ObjectivesDocument4 pagesOpen Circuit Saturation Curve of An Alternator I. ObjectivesArnel Pamaos Lopiba MontañezPas encore d'évaluation
- Experiment 04Document7 pagesExperiment 04Zeynal Abidin ŞabaşPas encore d'évaluation
- Power Electronics Lab ManualDocument51 pagesPower Electronics Lab ManualAnand ShankarPas encore d'évaluation
- ECCE4356 Lab Manual 2Document29 pagesECCE4356 Lab Manual 2Siva Bala KrishnanPas encore d'évaluation
- E M L - M: Lectrical Achines AB AnualDocument29 pagesE M L - M: Lectrical Achines AB AnualSuresh Kumar MunnurukapuPas encore d'évaluation
- 2012-MS0EE095 - PaperDocument5 pages2012-MS0EE095 - PaperTalha MehmoodPas encore d'évaluation
- Ac Servo Speed Torque Characteristics Measurement Unit - PREMIERDocument14 pagesAc Servo Speed Torque Characteristics Measurement Unit - PREMIERAAYUSH KUMARPas encore d'évaluation
- Expt 6 The Cage Rotor Induction MotorDocument5 pagesExpt 6 The Cage Rotor Induction MotorRyan De GuzmanPas encore d'évaluation
- Control Systems Lab ManualDocument67 pagesControl Systems Lab ManualRockstar Rich100% (1)
- Exp. 3 - Load Test and Equivalent Circuit Determination On Three Phase Squirrel Cage Induction Motor andDocument9 pagesExp. 3 - Load Test and Equivalent Circuit Determination On Three Phase Squirrel Cage Induction Motor andSanjay MeenaPas encore d'évaluation
- Exp. 2 - OCC and Load Test On AlternatorDocument7 pagesExp. 2 - OCC and Load Test On AlternatorKailash Jagarwal100% (1)
- (M2-LAB) Lab Activity 2 - The DC Shunt Generator and MotorDocument10 pages(M2-LAB) Lab Activity 2 - The DC Shunt Generator and MotorCarlo TabalanzaPas encore d'évaluation
- EES612 Lab1Document25 pagesEES612 Lab1Levan LomidzePas encore d'évaluation
- ECEN 2270 CU Boulder 2013, Electronics Design Lab, Lab2, WIPDocument8 pagesECEN 2270 CU Boulder 2013, Electronics Design Lab, Lab2, WIPNunjaPas encore d'évaluation
- Control System Lab ManualDocument63 pagesControl System Lab ManualkrishnandrkPas encore d'évaluation
- Speed-Torque Characteristics of A Wound-Rotor Induction MotorDocument5 pagesSpeed-Torque Characteristics of A Wound-Rotor Induction Motorعلي عايد عبدالشهيدPas encore d'évaluation
- Experiment No. 1 Transfer Function of Two Phase A. C. Servo MotorDocument3 pagesExperiment No. 1 Transfer Function of Two Phase A. C. Servo MotorPriyatham KattaPas encore d'évaluation
- C2 - Error Channel Investigation and Simple Position Control SystemDocument9 pagesC2 - Error Channel Investigation and Simple Position Control SystemizamaiyusPas encore d'évaluation
- Experiment# 8 TITLE: Voltage Regulation of A 3-Phase GeneratorDocument15 pagesExperiment# 8 TITLE: Voltage Regulation of A 3-Phase GeneratorJohn Renzel RiveraPas encore d'évaluation
- Short Shunt (2007)Document7 pagesShort Shunt (2007)Jeffrey NambatacPas encore d'évaluation
- Project Report Control (DC Motor Module DCM150f) KP KDDocument5 pagesProject Report Control (DC Motor Module DCM150f) KP KD黒い からすPas encore d'évaluation
- CS7Document8 pagesCS7zubairashrafPas encore d'évaluation
- Saa1042v PDFDocument7 pagesSaa1042v PDFVinny TukPas encore d'évaluation
- No Load Chara. of GeneratorDocument5 pagesNo Load Chara. of GeneratorYasser MohammedPas encore d'évaluation
- Engineering Lab 5 Machine Lab Lab 1 ReportDocument9 pagesEngineering Lab 5 Machine Lab Lab 1 Reportram010Pas encore d'évaluation
- Exp 7Document11 pagesExp 7John Renzel RiveraPas encore d'évaluation
- Experiment No: 1: Aim: Apparatus RequiredDocument29 pagesExperiment No: 1: Aim: Apparatus RequiredKarthi RamachandranPas encore d'évaluation
- Speed ControlDocument10 pagesSpeed Controlعبدالله قيس محمود الحيدريPas encore d'évaluation
- Ijresm V2 I2 192Document3 pagesIjresm V2 I2 192Nguyễn Hải ĐăngPas encore d'évaluation
- Lab 3: Control System Design: Part 1: Introduction and ObjectivesDocument13 pagesLab 3: Control System Design: Part 1: Introduction and Objectivesvince kafuaPas encore d'évaluation
- Power Systems Analysis Lab 2 ReportDocument7 pagesPower Systems Analysis Lab 2 ReportDeVillersSeciPas encore d'évaluation
- Series MotorDocument11 pagesSeries MotorEiz Al.YemaniPas encore d'évaluation
- Design and Implementation of Cosine Control Firing Scheme For Single Phase Fully Controlled Bridge RectifierDocument7 pagesDesign and Implementation of Cosine Control Firing Scheme For Single Phase Fully Controlled Bridge RectifierNishith DhinoraPas encore d'évaluation
- Mem SCH Eng OU 4 65Document9 pagesMem SCH Eng OU 4 65Helga Ines BenzPas encore d'évaluation
- Total 363 Lab ManualDocument67 pagesTotal 363 Lab ManualBisal Sarker JoyPas encore d'évaluation
- Control System Lab ManualDocument52 pagesControl System Lab ManualMohammad Umar RehmanPas encore d'évaluation
- Ashish Singh 2K20CEEE11 Exp-6Document6 pagesAshish Singh 2K20CEEE11 Exp-6Ashish SinghPas encore d'évaluation
- Implementation of A Single-Phase Unipolar Inverter Using DSP TMS320F241Document5 pagesImplementation of A Single-Phase Unipolar Inverter Using DSP TMS320F241Pci ElectronicaPas encore d'évaluation
- Control System Lab EE-324-FDocument45 pagesControl System Lab EE-324-FDheeraj KumarPas encore d'évaluation
- EEE363 (Exp 2) Study of The Torque Speed Relationship of DC ShuntDocument6 pagesEEE363 (Exp 2) Study of The Torque Speed Relationship of DC Shuntsalad.ass420420Pas encore d'évaluation
- Lab 8fsdDocument4 pagesLab 8fsdAnonymous ycaTC6EPas encore d'évaluation
- Learning Materials For EE 422 L: A Developed Laboratory ManualDocument5 pagesLearning Materials For EE 422 L: A Developed Laboratory ManualArnel Pamaos Lopiba MontañezPas encore d'évaluation
- Me2142-2 Speed/Position Control of A DC Motor: Department of Mechanical Engineering National University of SingaporeDocument9 pagesMe2142-2 Speed/Position Control of A DC Motor: Department of Mechanical Engineering National University of SingaporeDeepak RainaPas encore d'évaluation
- Exp 12 Single Phase Inverter Part IIDocument7 pagesExp 12 Single Phase Inverter Part IIusmpowerlabPas encore d'évaluation
- Activity-Lab-2-The DC Shunt Generator and MotorDocument14 pagesActivity-Lab-2-The DC Shunt Generator and MotorDiether PaderoPas encore d'évaluation
- Activity-Lab-2-The DC Shunt Generator and MotorDocument14 pagesActivity-Lab-2-The DC Shunt Generator and MotorDiether PaderoPas encore d'évaluation
- Exp 8 Buck ConverterDocument7 pagesExp 8 Buck Converterusmpowerlab50% (2)
- B Done Group 408 - Short Report - Angular Speed ControlDocument9 pagesB Done Group 408 - Short Report - Angular Speed ControlMOHAMMED A.M. ABUJARAD 19EE0049Pas encore d'évaluation
- Lab 13Document9 pagesLab 13Lûtwàmä JôëPas encore d'évaluation
- Zenon Alarms AdministrationDocument167 pagesZenon Alarms AdministrationZeynal Abidin Şabaş100% (1)
- Review3 FrequencyDocument2 pagesReview3 FrequencyZeynal Abidin ŞabaşPas encore d'évaluation
- Zenon Manual: AllocationsDocument8 pagesZenon Manual: AllocationsZeynal Abidin ŞabaşPas encore d'évaluation
- Celal Aydın İntegral S.BDocument142 pagesCelal Aydın İntegral S.BZeynal Abidin ŞabaşPas encore d'évaluation
- Massachusetts Institute of TechnologyDocument2 pagesMassachusetts Institute of TechnologyZeynal Abidin ŞabaşPas encore d'évaluation
- 2015 2016 Summer10422Document6 pages2015 2016 Summer10422Zeynal Abidin ŞabaşPas encore d'évaluation
- ASTMDocument16 pagesASTMAbu Bakar Siddique SuridPas encore d'évaluation
- EEE 312 Electronic Circuits: Darlington ConnectionDocument5 pagesEEE 312 Electronic Circuits: Darlington ConnectionZeynal Abidin ŞabaşPas encore d'évaluation
- EEE 312 Lecture1Document11 pagesEEE 312 Lecture1Zeynal Abidin ŞabaşPas encore d'évaluation
- Celal Aydın İntegral S.BDocument142 pagesCelal Aydın İntegral S.BZeynal Abidin ŞabaşPas encore d'évaluation
- Experiment 9 10Document2 pagesExperiment 9 10Zeynal Abidin ŞabaşPas encore d'évaluation
- EEE 312 Electronic Circuits: The Hybrid Equivalent ModelDocument6 pagesEEE 312 Electronic Circuits: The Hybrid Equivalent ModelZeynal Abidin ŞabaşPas encore d'évaluation
- Project ReportDocument12 pagesProject ReportZeynal Abidin ŞabaşPas encore d'évaluation
- Experiment 01Document10 pagesExperiment 01Zeynal Abidin ŞabaşPas encore d'évaluation
- EEE 312 Electronic Circuits: ProblemsDocument5 pagesEEE 312 Electronic Circuits: ProblemsZeynal Abidin ŞabaşPas encore d'évaluation
- EEE 312 Lecture8Document7 pagesEEE 312 Lecture8Zeynal Abidin ŞabaşPas encore d'évaluation
- EEE 312 Lecture10Document17 pagesEEE 312 Lecture10Zeynal Abidin ŞabaşPas encore d'évaluation
- EEE 312 Lecture12Document15 pagesEEE 312 Lecture12Zeynal Abidin ŞabaşPas encore d'évaluation
- Bitirme RaporuDocument26 pagesBitirme RaporuZeynal Abidin ŞabaşPas encore d'évaluation
- Supervisor:: Zeynal Abidin ŞABAŞ, Ali KARAKUŞ, İsmet ÇELİK Assist. Prof. Dr. Ahmet Mete VURALDocument1 pageSupervisor:: Zeynal Abidin ŞABAŞ, Ali KARAKUŞ, İsmet ÇELİK Assist. Prof. Dr. Ahmet Mete VURALZeynal Abidin ŞabaşPas encore d'évaluation
- Eee 499 Example PosterDocument1 pageEee 499 Example PosterZeynal Abidin ŞabaşPas encore d'évaluation
- 01-15th December, GK Today MagazineDocument134 pages01-15th December, GK Today MagazinejohnPas encore d'évaluation
- Hostel B Menu From 16 March To 31 March'2024Document4 pagesHostel B Menu From 16 March To 31 March'2024govindkauPas encore d'évaluation
- What Is Kpag?: Table of ContentsDocument2 pagesWhat Is Kpag?: Table of Contentsangelito bernalPas encore d'évaluation
- Subject: Using Emergency Power With DSD Elevator DrivesDocument4 pagesSubject: Using Emergency Power With DSD Elevator DrivesmehariiPas encore d'évaluation
- Handling CFGDocument22 pagesHandling CFGRadit BentoPas encore d'évaluation
- Hemiplegia LectureDocument37 pagesHemiplegia LectureRancesh FamoPas encore d'évaluation
- Atomic Structure RevisionDocument4 pagesAtomic Structure RevisioncvPas encore d'évaluation
- Astm E1975 - 1 (En)Document17 pagesAstm E1975 - 1 (En)Dinesh Sai100% (1)
- Elementary Graph Theory: Robin Truax March 2020Document15 pagesElementary Graph Theory: Robin Truax March 2020Jefferson WidodoPas encore d'évaluation
- DH-IPC-HDBW1231E: 2MP WDR IR Mini-Dome Network CameraDocument3 pagesDH-IPC-HDBW1231E: 2MP WDR IR Mini-Dome Network CameraDeltaz AZPas encore d'évaluation
- Modding For Ysflight - Scenery EditorDocument92 pagesModding For Ysflight - Scenery Editordecaff_42Pas encore d'évaluation
- GalvInfoNote 1 4Document4 pagesGalvInfoNote 1 4rplata63Pas encore d'évaluation
- Gexcon DDT Scotts PresentationDocument33 pagesGexcon DDT Scotts PresentationMochamad SafarudinPas encore d'évaluation
- Geometry CheatsheetDocument5 pagesGeometry CheatsheetMarilyn CitadelPas encore d'évaluation
- Project Sanjay YadavDocument51 pagesProject Sanjay YadavriyacomputerPas encore d'évaluation
- Edc Contractors Basic Safety Training: "New Normal" EditionDocument8 pagesEdc Contractors Basic Safety Training: "New Normal" EditionCharles Rommel TadoPas encore d'évaluation
- Selulitis Orbita Pada Laki-Laki Usia 64 Tahun: Laporan KasusDocument8 pagesSelulitis Orbita Pada Laki-Laki Usia 64 Tahun: Laporan KasusLuh Dita YuliandinaPas encore d'évaluation
- Coffee Vibes: Here Is Where Your Presentation BeginsDocument86 pagesCoffee Vibes: Here Is Where Your Presentation Beginssyeda salmaPas encore d'évaluation
- BR18S-7 Manual CracteristicasDocument10 pagesBR18S-7 Manual Cracteristicasrendimax insumos agricolasPas encore d'évaluation
- What Is MetaphysicsDocument24 pagesWhat Is MetaphysicsDiane EnopiaPas encore d'évaluation
- Unidajump2019,+5 +31-42+JP+9 (1) +April+2018+AminullahDocument12 pagesUnidajump2019,+5 +31-42+JP+9 (1) +April+2018+AminullahSatria MandalaPas encore d'évaluation
- DVH-P4950 P4050Document111 pagesDVH-P4950 P4050roto44100% (1)
- Research Article: International Research Journal of PharmacyDocument5 pagesResearch Article: International Research Journal of PharmacyAlfrets Marade SianiparPas encore d'évaluation
- Agriculture Budget 2013-14Document33 pagesAgriculture Budget 2013-14Ajay LimbasiyaPas encore d'évaluation