Vous aimerez peut-être aussi
- AMBA AHB Protocol PresentationDocument45 pagesAMBA AHB Protocol Presentationachanta1291% (11)
- Calcutta University Computer Sc. SyllabusDocument28 pagesCalcutta University Computer Sc. SyllabusAyan Debnath75% (8)
- A Survey On Agriculture Monitoring Using Wireless Sensor NetworkDocument4 pagesA Survey On Agriculture Monitoring Using Wireless Sensor NetworkATSPas encore d'évaluation
- Olive TreesDocument4 pagesOlive TreesIrèn RéniPas encore d'évaluation
- Geosensors To Support Crop ProductionDocument29 pagesGeosensors To Support Crop Productionanabela_grifo2440Pas encore d'évaluation
- Applying IT in Precision ApicultureDocument11 pagesApplying IT in Precision Apiculturepaula sinisterraPas encore d'évaluation
- Animal Repellent DocumentDocument36 pagesAnimal Repellent DocumentTaj SPas encore d'évaluation
- Improving Automatic Climate Control With Decision Support Techniques To Minimize Disease Effects in Greenhouse TomatoesDocument14 pagesImproving Automatic Climate Control With Decision Support Techniques To Minimize Disease Effects in Greenhouse TomatoesAbinaya RagaventhirarPas encore d'évaluation
- Recent Advances in Sensing Plant Diseases For Precision Crop Protection PDFDocument13 pagesRecent Advances in Sensing Plant Diseases For Precision Crop Protection PDFJhon ReyesPas encore d'évaluation
- A Model For Ecological Assessment To PesticideDocument8 pagesA Model For Ecological Assessment To PesticideVictor Lauro Perez GarciaPas encore d'évaluation
- A Reinforcement Learning Approach For Optimal Placement of Sensors in Protected Cultivation SystemsDocument20 pagesA Reinforcement Learning Approach For Optimal Placement of Sensors in Protected Cultivation Systems鍾孟哲Pas encore d'évaluation
- IJCRTS020022Document8 pagesIJCRTS020022joel mshanaPas encore d'évaluation
- Animal Repellent - FullDocument58 pagesAnimal Repellent - FullThe Mind100% (1)
- A Review of Imaging Techniques For Plant PhenotypingDocument34 pagesA Review of Imaging Techniques For Plant Phenotypingjhon monteroPas encore d'évaluation
- Sem 1: EVS ProjectDocument22 pagesSem 1: EVS Projectmetalwihen50% (4)
- Agricultural IoT System Accurately Recognizes Crop DiseasesDocument13 pagesAgricultural IoT System Accurately Recognizes Crop DiseasesAbirPas encore d'évaluation
- Agronomy: Smart Palm: An Iot Framework For Red Palm Weevil Early DetectionDocument21 pagesAgronomy: Smart Palm: An Iot Framework For Red Palm Weevil Early DetectionMerouane AmraouiPas encore d'évaluation
- 1 s2.0 S2214317320300196 MainDocument25 pages1 s2.0 S2214317320300196 MainMotiur RahamanPas encore d'évaluation
- Jaemyung Shin et al_2021_A deep learning approach for RGB image-based powdery mildew disease detectionDocument8 pagesJaemyung Shin et al_2021_A deep learning approach for RGB image-based powdery mildew disease detectionbigliang98Pas encore d'évaluation
- 1 s2.0 S2772375521000228 MainDocument7 pages1 s2.0 S2772375521000228 MainCEM ALBUKREKPas encore d'évaluation
- A Cognitive Vision Approach To Early Pest Detection in Greenhouse CropsDocument13 pagesA Cognitive Vision Approach To Early Pest Detection in Greenhouse CropsVictor Lauro Perez GarciaPas encore d'évaluation
- Remote Sensing Techniques in Olive Farms in Arid Regions of TunisiaDocument10 pagesRemote Sensing Techniques in Olive Farms in Arid Regions of TunisiaTunde KallaiPas encore d'évaluation
- Sensors: An Air-Ground Wireless Sensor Network For Crop MonitoringDocument21 pagesSensors: An Air-Ground Wireless Sensor Network For Crop Monitoringmkeskin85Pas encore d'évaluation
- Artigo Monitoramento Colméia Jiang2016Document15 pagesArtigo Monitoramento Colméia Jiang2016Washington BrazilPas encore d'évaluation
- Role of RS in Precision AgricultureDocument6 pagesRole of RS in Precision AgricultureKamil UsmanPas encore d'évaluation
- Sensors 20 01487Document18 pagesSensors 20 01487Yash TiklePas encore d'évaluation
- Research Paper On Vegetation Health Monitoring Using Agricultural IOTDocument3 pagesResearch Paper On Vegetation Health Monitoring Using Agricultural IOTEditor IJRITCCPas encore d'évaluation
- Sustainability 08 00831Document12 pagesSustainability 08 00831surendra tupePas encore d'évaluation
- An Online Method For Estimating Grazing and Rumination Bouts Using Acoustic Signals in Grazing CattleDocument21 pagesAn Online Method For Estimating Grazing and Rumination Bouts Using Acoustic Signals in Grazing CattleLeonardo GiovaniniPas encore d'évaluation
- Sensors: Honey Bee Colonies Remote Monitoring SystemDocument21 pagesSensors: Honey Bee Colonies Remote Monitoring SystemrechemPas encore d'évaluation
- v1 CoveredDocument17 pagesv1 CoveredTefePas encore d'évaluation
- NSC 93rd PaperDocument6 pagesNSC 93rd PaperKalimuthu PaulpandianPas encore d'évaluation
- Agriculture 10 00234 v2Document14 pagesAgriculture 10 00234 v2KiMoFxPas encore d'évaluation
- A Smart Deforestation Monitoring and Control System ModelDocument13 pagesA Smart Deforestation Monitoring and Control System ModelVelumani sPas encore d'évaluation
- Spatial Monitoring of InsectsDocument18 pagesSpatial Monitoring of InsectsAGOSSOU HippolytePas encore d'évaluation
- SMS JournalDocument6 pagesSMS JournalSBDU PDBPas encore d'évaluation
- Application For Solution To Identify and Solve Disease in PlantsCropsDocument7 pagesApplication For Solution To Identify and Solve Disease in PlantsCropsIJRASETPublicationsPas encore d'évaluation
- Instrumentation and Process Control - InstrumentationDocument10 pagesInstrumentation and Process Control - InstrumentationMarcio Rocha100% (1)
- Design and Evaluation of A Maize Monitoring System For Precision PlantingDocument7 pagesDesign and Evaluation of A Maize Monitoring System For Precision PlantingNoureldin SharabyPas encore d'évaluation
- III Intro and MethodsDocument8 pagesIII Intro and Methodsrovic.esprelaPas encore d'évaluation
- Computers and Electronics in Agriculture: Xiaochuang Yao, Dehai Zhu, Wenju Yun, Fan Peng, Lin LiDocument11 pagesComputers and Electronics in Agriculture: Xiaochuang Yao, Dehai Zhu, Wenju Yun, Fan Peng, Lin LiFelipe Tapia GómezPas encore d'évaluation
- Remote Sensing Applications: Society and EnvironmentDocument12 pagesRemote Sensing Applications: Society and EnvironmentangiePas encore d'évaluation
- Ece305 - Project ProposalDocument7 pagesEce305 - Project ProposalEDUARD VI DANDAPas encore d'évaluation
- Critical Analysis of Data Fusion of Drought and Disease in Relation To Its Effect On Crops-1Document9 pagesCritical Analysis of Data Fusion of Drought and Disease in Relation To Its Effect On Crops-1Olalekan AbdulRasheed OgunjimiPas encore d'évaluation
- WCCCT 2016 11Document5 pagesWCCCT 2016 11Klevin LloydPas encore d'évaluation
- Computers and Electronics in Agriculture: SciencedirectDocument8 pagesComputers and Electronics in Agriculture: SciencedirectLUIZ ANTÔNIO RASIAPas encore d'évaluation
- Rse2 329Document14 pagesRse2 329Mark Angelou PedPas encore d'évaluation
- Objective Monitoring of Biosecurity On Pig Farms2 PDFDocument2 pagesObjective Monitoring of Biosecurity On Pig Farms2 PDFLaura RomeroPas encore d'évaluation
- Technical Paper On Environmental Monitor and Control, Pests and Diseases in The GreenhouseDocument7 pagesTechnical Paper On Environmental Monitor and Control, Pests and Diseases in The GreenhouseInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- Crop Disease Detection Using Machine LearningDocument24 pagesCrop Disease Detection Using Machine LearningNuramin Fitri Bin AminuddinPas encore d'évaluation
- Ais 500576Document2 pagesAis 500576nader naderiPas encore d'évaluation
- Monitoring of Pest Insect Traps Using Image Sensors & DspicDocument6 pagesMonitoring of Pest Insect Traps Using Image Sensors & DspicseventhsensegroupPas encore d'évaluation
- Sensors: Monitoring Plant Status and Fertilization Strategy Through Multispectral ImagesDocument21 pagesSensors: Monitoring Plant Status and Fertilization Strategy Through Multispectral ImagesMatheus CardimPas encore d'évaluation
- An Intelligent Control For Greenhouse Automation, Oriented by The Concepts of SPA and SFA - An Application To A Post-Harvest ProcessDocument18 pagesAn Intelligent Control For Greenhouse Automation, Oriented by The Concepts of SPA and SFA - An Application To A Post-Harvest ProcesslinoPas encore d'évaluation
- WC Case StudyDocument3 pagesWC Case StudyVedant KaushishPas encore d'évaluation
- Amulya ReportDocument39 pagesAmulya ReportAbhilash AbhiPas encore d'évaluation
- ARTICULOINVERNADEROSDocument22 pagesARTICULOINVERNADEROSAlejandro VargasPas encore d'évaluation
- Computers and Electronics in Agriculture: Original PapersDocument11 pagesComputers and Electronics in Agriculture: Original PapersJahn FabiánPas encore d'évaluation
- Sensors: Precision Agriculture Techniques and Practices: From Considerations To ApplicationsDocument25 pagesSensors: Precision Agriculture Techniques and Practices: From Considerations To Applicationsali aghajaniPas encore d'évaluation
- Computers and Electronics in Agriculture: A B C D A D eDocument7 pagesComputers and Electronics in Agriculture: A B C D A D eFtamaPas encore d'évaluation
- How Information Systems Can Help in Alarm/Alert DetectionD'EverandHow Information Systems Can Help in Alarm/Alert DetectionPas encore d'évaluation
- The Computerized Greenhouse: Automatic Control Application in Plant ProductionD'EverandThe Computerized Greenhouse: Automatic Control Application in Plant ProductionPas encore d'évaluation
- Amukh Expre CertifDocument1 pageAmukh Expre CertifPronadeep BoraPas encore d'évaluation
- What Is JESD204 and Why Should We Pay Attention To ItDocument3 pagesWhat Is JESD204 and Why Should We Pay Attention To ItPronadeep BoraPas encore d'évaluation
- JESD204C primer introduces new high-speed serial link standardDocument3 pagesJESD204C primer introduces new high-speed serial link standardPronadeep BoraPas encore d'évaluation
- SerDes - WikipediaDocument3 pagesSerDes - WikipediaPronadeep BoraPas encore d'évaluation
- EDN - Understanding Layers in The JESD204B Specification - A High Speed ADC Perspective, Part 2 - EDNDocument8 pagesEDN - Understanding Layers in The JESD204B Specification - A High Speed ADC Perspective, Part 2 - EDNPronadeep BoraPas encore d'évaluation
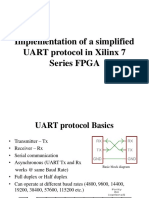
- UART SpecDocument24 pagesUART SpecPronadeep BoraPas encore d'évaluation
- 2quickly Implement JESD204BDocument4 pages2quickly Implement JESD204BPronadeep BoraPas encore d'évaluation
- Demystifying Deterministic Latency Within JESD204B Converters - Electronic DesignDocument11 pagesDemystifying Deterministic Latency Within JESD204B Converters - Electronic DesignPronadeep BoraPas encore d'évaluation
- 8b - 10b Encoding - WikipediaDocument8 pages8b - 10b Encoding - WikipediaPronadeep BoraPas encore d'évaluation
- Asynchronous FIFO Basics for Safe Clock Domain CrossingDocument40 pagesAsynchronous FIFO Basics for Safe Clock Domain CrossingPronadeep Bora100% (1)
- UARTDocument24 pagesUARTPronadeep BoraPas encore d'évaluation
- SMDP - Project - Final - Proposal - NIT - N - Draft PDFDocument17 pagesSMDP - Project - Final - Proposal - NIT - N - Draft PDFPronadeep BoraPas encore d'évaluation
- AMBA AHB AXI Interview Questions Verification Guide PDFDocument2 pagesAMBA AHB AXI Interview Questions Verification Guide PDFPronadeep BoraPas encore d'évaluation
- Difference Between AHB and AXI - Difference BetweenDocument2 pagesDifference Between AHB and AXI - Difference BetweenPronadeep BoraPas encore d'évaluation
- AXI vs AHB: Understanding the Differences Between the Two Popular ARM Bus ProtocolsDocument3 pagesAXI vs AHB: Understanding the Differences Between the Two Popular ARM Bus ProtocolsPronadeep Bora100% (2)
- Valid Documents List PDFDocument2 pagesValid Documents List PDFAnoop DubeyPas encore d'évaluation
- Current Project StatusDocument1 pageCurrent Project StatusPronadeep BoraPas encore d'évaluation
- Asynchronous FIFO Basics for Safe Clock Domain CrossingDocument40 pagesAsynchronous FIFO Basics for Safe Clock Domain CrossingPronadeep Bora100% (1)
- SMDP C2SDSixmonthlyProgressFinalDocument4 pagesSMDP C2SDSixmonthlyProgressFinalPronadeep BoraPas encore d'évaluation
- V2 - Proforma For Submitting 6 MONTHLY REPORTDocument9 pagesV2 - Proforma For Submitting 6 MONTHLY REPORTPronadeep BoraPas encore d'évaluation
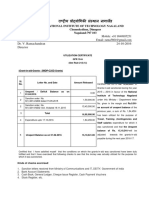
- Utilization Certificate - SMDP-1Document1 pageUtilization Certificate - SMDP-1Pronadeep BoraPas encore d'évaluation
- WHMS NitnDocument14 pagesWHMS NitnPronadeep BoraPas encore d'évaluation
- Six Monthly Progress-FormatDocument3 pagesSix Monthly Progress-FormatPronadeep BoraPas encore d'évaluation
- AQMS NitnDocument11 pagesAQMS NitnPronadeep BoraPas encore d'évaluation
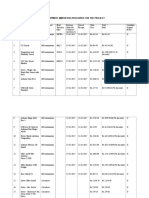
- Quotations For Components Required For SMDP ProjectDocument2 pagesQuotations For Components Required For SMDP ProjectPronadeep BoraPas encore d'évaluation
- Six Monthly Progress-Annexures (Tables)Document6 pagesSix Monthly Progress-Annexures (Tables)Pronadeep BoraPas encore d'évaluation
- Nit Nagaland - Pmod - Quote - DG - CoreelDocument1 pageNit Nagaland - Pmod - Quote - DG - CoreelPronadeep BoraPas encore d'évaluation
- Digilent LABSeupimentsDocument1 pageDigilent LABSeupimentsPronadeep BoraPas encore d'évaluation
- Element14equipments PDFDocument1 pageElement14equipments PDFPronadeep BoraPas encore d'évaluation
- I/O Basics: Ports Data, Control, and Status BitsDocument11 pagesI/O Basics: Ports Data, Control, and Status BitsNikhil GobhilPas encore d'évaluation
- The PCI Local BusDocument56 pagesThe PCI Local Busatorresh090675Pas encore d'évaluation
- Infineon TC1766 DS v01 00 enDocument117 pagesInfineon TC1766 DS v01 00 enFiliberto Conde MayoPas encore d'évaluation
- Zac Wire App NotesDocument8 pagesZac Wire App NotesNathan ImigPas encore d'évaluation
- Building and Programming Embedded DevicesDocument130 pagesBuilding and Programming Embedded DevicesMukeshPas encore d'évaluation
- LC863328CDocument21 pagesLC863328CNazir ShahPas encore d'évaluation
- MC9S08SF4Document30 pagesMC9S08SF4Ari BaskoroPas encore d'évaluation
- EWSDocument4 pagesEWSMohit VekariaPas encore d'évaluation
- EX3G PLC HMI All in One Programming ManualDocument72 pagesEX3G PLC HMI All in One Programming ManualEkanit ChuaykoedPas encore d'évaluation
- 88f5182-Based Storage Networking Platforms Open Source Community Programmer's User GuideDocument389 pages88f5182-Based Storage Networking Platforms Open Source Community Programmer's User Guidepablo_marxPas encore d'évaluation
- The Hardware of The KDF9Document23 pagesThe Hardware of The KDF9nomen nescioPas encore d'évaluation
- Double HandshakeDocument11 pagesDouble HandshakeLawrence OnyebuchiPas encore d'évaluation
- m161 PDFDocument260 pagesm161 PDFMihai PopescuPas encore d'évaluation
- Introduct To Artisoft (LANtastic) Hardware Training Module From 3/23/1996Document37 pagesIntroduct To Artisoft (LANtastic) Hardware Training Module From 3/23/1996mark-scribdPas encore d'évaluation
- M.Sc. Electronics and Communications Microprocessors and Microcontrollers GuideDocument442 pagesM.Sc. Electronics and Communications Microprocessors and Microcontrollers GuideMegha Anand0% (1)
- s7 300 Asi Diag Lib Doku Classic v30 enDocument120 pagess7 300 Asi Diag Lib Doku Classic v30 enSpawnkariotoPas encore d'évaluation
- Operating Systems Io SystemsDocument25 pagesOperating Systems Io Systemskimchen edenellePas encore d'évaluation
- UM0470 - STM8 SWIM Communication Protocol and Debug ModuleDocument37 pagesUM0470 - STM8 SWIM Communication Protocol and Debug ModuleSharan HuggiPas encore d'évaluation
- Et200sp Di 8xnamur HF Manual en-US en-USDocument37 pagesEt200sp Di 8xnamur HF Manual en-US en-USSaravana Kumar JPas encore d'évaluation
- RSLogix500 Project ReportDocument22 pagesRSLogix500 Project ReportDanielSaniPas encore d'évaluation
- Zynq Power DownDocument2 pagesZynq Power DownMayur RaulPas encore d'évaluation
- Chapter-5 Processor FundamentalsDocument16 pagesChapter-5 Processor FundamentalsVimal VijayakumarPas encore d'évaluation
- User Manual For NXP Real Time Clocks PCF85x3, PCF85x63, PCA8565, PCF2123, and PCA21125Document54 pagesUser Manual For NXP Real Time Clocks PCF85x3, PCF85x63, PCA8565, PCF2123, and PCA21125Aymen ChaairaPas encore d'évaluation
- Accelerator ToolkitDocument36 pagesAccelerator Toolkitvdíaz_485617Pas encore d'évaluation
- 09 GIGA-multitronic ControllingDocument30 pages09 GIGA-multitronic ControllingSugiharto RichardPas encore d'évaluation
- Digital Input Module SM 321 DI 16 X DC 24/125 V With Hardware and Diagnostic Interrupts (6ES7321-7EH00-0AB0)Document5 pagesDigital Input Module SM 321 DI 16 X DC 24/125 V With Hardware and Diagnostic Interrupts (6ES7321-7EH00-0AB0)Fabio CavalheiroPas encore d'évaluation
- Group 6 Cpu Design PresentationDocument50 pagesGroup 6 Cpu Design PresentationFerry AriPas encore d'évaluation
- SysReg XML A Profile-2023-12Document6 170 pagesSysReg XML A Profile-2023-12davidcosmin98Pas encore d'évaluation
- My Triumph Connectivity Module ManualDocument41 pagesMy Triumph Connectivity Module ManualRajesh100% (1)