Vous aimerez peut-être aussi
- Estructura de Datos I - Tarea 01Document2 pagesEstructura de Datos I - Tarea 01SandyVarela0% (2)
- Introduccion Al Control Robusto Español PDFDocument34 pagesIntroduccion Al Control Robusto Español PDFFrancisco GomezPas encore d'évaluation
- SUMA, RESTA, MULTIPLICACION, DIVISION en MatlabDocument3 pagesSUMA, RESTA, MULTIPLICACION, DIVISION en MatlabAnyta Sanguil100% (1)
- 9 Control Sistemas MultivariablesDocument21 pages9 Control Sistemas MultivariablesLeonardoPas encore d'évaluation
- 2021 2T 12 Sistemas de Lazo CerradoDocument39 pages2021 2T 12 Sistemas de Lazo CerradoCinthya Duarte PasaguayPas encore d'évaluation
- Tema 3 UnlockedDocument27 pagesTema 3 UnlockedMartín Ezequiel Pedrozo RocaPas encore d'évaluation
- Control II - La Función de Transferencia PulsoDocument24 pagesControl II - La Función de Transferencia PulsoAlberto Pacheco Herrera50% (2)
- S3 Lab Funciones de TransferenciaDocument6 pagesS3 Lab Funciones de Transferenciajoseph chavezPas encore d'évaluation
- Control Deslizante MRTM 2DOFDocument8 pagesControl Deslizante MRTM 2DOFRicardo Rodriguez BustinzaPas encore d'évaluation
- Tema2.RepresMatematicaDeLosModelos AluDocument43 pagesTema2.RepresMatematicaDeLosModelos AluKevin arancibia calderonPas encore d'évaluation
- 9.1 Diagrama de Bloques y Funciones de Prueba 2017 PDFDocument23 pages9.1 Diagrama de Bloques y Funciones de Prueba 2017 PDFbresler_linPas encore d'évaluation
- Lab 1Document10 pagesLab 1MB LegendsPas encore d'évaluation
- Modelos Matematicos de Sistemas 1Document17 pagesModelos Matematicos de Sistemas 1Jhon FloresPas encore d'évaluation
- Funciones Transfer en CIA de PulsosDocument7 pagesFunciones Transfer en CIA de PulsosFabian Gerardo Vallejo JimenezPas encore d'évaluation
- Practica 5Document4 pagesPractica 5Arturo RomeroPas encore d'évaluation
- 02 - Introducción Al Problema de Control de Sistemas MIMODocument22 pages02 - Introducción Al Problema de Control de Sistemas MIMOSucheful LyPas encore d'évaluation
- Transformada - Z - Respuesta Transitoria - 2017Document3 pagesTransformada - Z - Respuesta Transitoria - 2017williamPas encore d'évaluation
- Experiencia 2 PDFDocument9 pagesExperiencia 2 PDFDIEGO2Pas encore d'évaluation
- PID en PICDocument9 pagesPID en PICArmando Pérez ReynosoPas encore d'évaluation
- Modelacion Dinamica de Sistemas de Control Unidad 2Document20 pagesModelacion Dinamica de Sistemas de Control Unidad 2Fernando GarciaPas encore d'évaluation
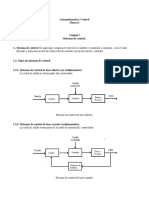
- Automatizacion y Control Fase I Unidad I SimpleDocument10 pagesAutomatizacion y Control Fase I Unidad I Simplesanlymorales23Pas encore d'évaluation
- Resumen #5. Funcion de Transferencia de Pulso. T.Z.MDocument6 pagesResumen #5. Funcion de Transferencia de Pulso. T.Z.MLaura PulidoPas encore d'évaluation
- Control Digital Con Matlab2Document23 pagesControl Digital Con Matlab2Csar PariapazaPas encore d'évaluation
- Sistemas de Control y Proceso Adaptativo. Diseño y Métodos y Estrategias de ControlDocument14 pagesSistemas de Control y Proceso Adaptativo. Diseño y Métodos y Estrategias de Controlosdac VargasPas encore d'évaluation
- Clase - 2 - Funcion de Transferencia - Diagrama de BloquesDocument18 pagesClase - 2 - Funcion de Transferencia - Diagrama de Bloqueslola guadalupe medina alarconPas encore d'évaluation
- UNIDAD II Funcion de TransferenciaDocument54 pagesUNIDAD II Funcion de TransferenciaDavid Jose GodoyPas encore d'évaluation
- (Tca-06) Tema 1 Representacion SistemasDocument20 pages(Tca-06) Tema 1 Representacion SistemasVictor Hugo Vargas MamaniPas encore d'évaluation
- Modelos Matematicos y ExperimentalesDocument32 pagesModelos Matematicos y ExperimentalesjhossielmartineauPas encore d'évaluation
- CIII Respuesta en Frecuencia LUGAR GEOMETRICO DE LAS RAICES y NyquistDocument3 pagesCIII Respuesta en Frecuencia LUGAR GEOMETRICO DE LAS RAICES y Nyquistadolfovivas0103Pas encore d'évaluation
- CD Cap4 2 Digitalizacion de Controladores PDFDocument16 pagesCD Cap4 2 Digitalizacion de Controladores PDFAcuña Lazaro AnthonyPas encore d'évaluation
- Controladores Industriales-ComplementarioDocument41 pagesControladores Industriales-ComplementarioSantiago Peña AlarconPas encore d'évaluation
- C4 Función de TransferenciaDocument36 pagesC4 Función de TransferenciaJordan ReyesPas encore d'évaluation
- T2.4 Función de Transferencia12-13Document16 pagesT2.4 Función de Transferencia12-13teresa alvarez alvarezPas encore d'évaluation
- IC L P6 Modos Control p1 TeoriaDocument14 pagesIC L P6 Modos Control p1 TeoriaAriana Andreina TisoPas encore d'évaluation
- PresentaciónDocument29 pagesPresentaciónDIEGO ALEJANDRO CASTILLO RAYMEPas encore d'évaluation
- Fundamentos de Control Predictivo de Procesos Instrumentación y Control de ProcesosDocument7 pagesFundamentos de Control Predictivo de Procesos Instrumentación y Control de ProcesosEdgar HuancaPas encore d'évaluation
- Lab 4 Sistemas de Control 19042022Document9 pagesLab 4 Sistemas de Control 19042022Igor Alberto Quezada NikulinaPas encore d'évaluation
- ReguDocument81 pagesRegugdyacoPas encore d'évaluation
- Apuntes Control AutomaticoDocument16 pagesApuntes Control Automaticofederico_farias_2Pas encore d'évaluation
- 04 Discretizacion Sistemas ContinuosDocument12 pages04 Discretizacion Sistemas ContinuosChristian Canchignia0% (1)
- Funcion de Transferencia de Sistemas FisicosDocument34 pagesFuncion de Transferencia de Sistemas FisicosRobin felderPas encore d'évaluation
- GuiaDocument5 pagesGuiarodrigocutipa53Pas encore d'évaluation
- Diagrama de BloquesDocument3 pagesDiagrama de Bloquessharik_gonzalesPas encore d'évaluation
- Informe Final N2-Controlador PIDDocument10 pagesInforme Final N2-Controlador PIDMichael Infantes HuacancaPas encore d'évaluation
- Practica 2 MultisimDocument21 pagesPractica 2 MultisimJulio SandovalPas encore d'évaluation
- TACP Conf3 2017Document193 pagesTACP Conf3 2017Diony CastilloPas encore d'évaluation
- Control 1 Unidad 1Document60 pagesControl 1 Unidad 1M4AC YTPas encore d'évaluation
- Examen 1Document8 pagesExamen 1Miguel Angel TexocotitlaPas encore d'évaluation
- Ingenieria de Control II.Document193 pagesIngenieria de Control II.hamscribdPas encore d'évaluation
- Modulo 2Document28 pagesModulo 2Diana Sofía AfanadorPas encore d'évaluation
- Capitulo 1Document29 pagesCapitulo 1Jason AndersonPas encore d'évaluation
- Clase VII - Teoria de ControlDocument38 pagesClase VII - Teoria de ControlmilerPas encore d'évaluation
- Valores SingularesDocument27 pagesValores SingularesExequielPas encore d'évaluation
- Cap2 - Registros de Funciones EspecialesDocument6 pagesCap2 - Registros de Funciones Especialeslgrome73Pas encore d'évaluation
- La Brújula de La Competitividad - Basado en CMIDocument84 pagesLa Brújula de La Competitividad - Basado en CMIEcoserviciosPas encore d'évaluation
- Gottlob FregeDocument2 pagesGottlob FregeSebastian AguileraPas encore d'évaluation
- Parcial 3 EjericiosDocument6 pagesParcial 3 EjericiosSergio Andrés Díaz VeraPas encore d'évaluation
- Multiplicacion y Division para Quinto Grado de Secundaria PDFDocument2 pagesMultiplicacion y Division para Quinto Grado de Secundaria PDFlorena garcia100% (1)
- Palabras Reservadas de VBDocument202 pagesPalabras Reservadas de VBArnaldo De JesusPas encore d'évaluation
- Mod Esto Unidad 05Document86 pagesMod Esto Unidad 05Philippe ContrerasPas encore d'évaluation
- PolipastoDocument3 pagesPolipastoJosse CeervantesPas encore d'évaluation
- Semana 03Document3 pagesSemana 03Sergio Eduardo Galán BernalPas encore d'évaluation
- Problemas de Aplicación 2Document42 pagesProblemas de Aplicación 2Piensa En GrandePas encore d'évaluation
- SEMANA 1 SetiembreDocument2 pagesSEMANA 1 SetiembrePequeñaa VickyPas encore d'évaluation
- Actividades Vectores UNIDAD 1 ANGELO GALLICIDocument10 pagesActividades Vectores UNIDAD 1 ANGELO GALLICIAngeloPas encore d'évaluation
- Practica N°09 Geometria y Trigonometria - Con ClavesDocument8 pagesPractica N°09 Geometria y Trigonometria - Con ClavesChipana Chura Mary LeidyPas encore d'évaluation
- Grandezas y Miserias de La Educación Latinoamericana Del Siglo VeinteDocument20 pagesGrandezas y Miserias de La Educación Latinoamericana Del Siglo VeinteLuisa GuarinPas encore d'évaluation
- Que Es La Teoria General de Sistemas?Document24 pagesQue Es La Teoria General de Sistemas?Luis SuazoPas encore d'évaluation
- Coursera - Online Courses From Top Universities PDFDocument3 pagesCoursera - Online Courses From Top Universities PDFahalonso0% (2)
- NMX Aa 61 1985Document13 pagesNMX Aa 61 1985OscarIturraldePas encore d'évaluation
- Practica 1 Chavez Malena Comunicaciones AnalogicasDocument8 pagesPractica 1 Chavez Malena Comunicaciones AnalogicasVázquez García Naomi QuetzalliPas encore d'évaluation
- La MAGNITUD Física, La Percepción de Su CANTIDAD y El Invento Del NUMERODocument27 pagesLa MAGNITUD Física, La Percepción de Su CANTIDAD y El Invento Del NUMEROmedia navPas encore d'évaluation
- Nrf-174-Pemex-2007-F1 (Helipuertos)Document23 pagesNrf-174-Pemex-2007-F1 (Helipuertos)jpcc1986Pas encore d'évaluation
- Taller Números Enteros 28-04-2020Document2 pagesTaller Números Enteros 28-04-2020leotom1428Pas encore d'évaluation
- Programación Lineal Parte 1 2020-2Document19 pagesProgramación Lineal Parte 1 2020-2JEIMY GOMEZ MALAGONPas encore d'évaluation
- Unidad IIDocument23 pagesUnidad IILoly R. PomaPas encore d'évaluation
- Análisis de Las Condiciones de Trabajo Con Expocision Al Ruido.Document10 pagesAnálisis de Las Condiciones de Trabajo Con Expocision Al Ruido.Yandry Chamba100% (1)
- Programacion Dinamica Alfredo Gomez 19716720Document8 pagesProgramacion Dinamica Alfredo Gomez 19716720Alfredo gomezPas encore d'évaluation
- Singularidades RemoviblesDocument1 pageSingularidades Removiblesdrkirk666Pas encore d'évaluation
- Proyecto Final de MatematicaDocument17 pagesProyecto Final de Matematicabrian guzmanPas encore d'évaluation
- Sílabo de STATA 13 para Economistas - Dic2013 PDFDocument5 pagesSílabo de STATA 13 para Economistas - Dic2013 PDFJorge Gian Pierre Almeyda CandiotiPas encore d'évaluation