Vous aimerez peut-être aussi
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Parts PrecedentDocument252 pagesParts PrecedentOscar PinzonPas encore d'évaluation
- Nanotechnology ApplicationsDocument11 pagesNanotechnology ApplicationsDivya DivyachilaPas encore d'évaluation
- Environmental and Sustainability Issues - 1Document21 pagesEnvironmental and Sustainability Issues - 121. PLT PAGALILAUAN, EDITHA MPas encore d'évaluation
- (Studies in American Popular History and Culture) Gail Fowler Mohanty - Labor and Laborers of The Loom - Mechanization and Handloom Weavers, 1780-1840 - Routledge (2006)Document292 pages(Studies in American Popular History and Culture) Gail Fowler Mohanty - Labor and Laborers of The Loom - Mechanization and Handloom Weavers, 1780-1840 - Routledge (2006)Милош Станојловић100% (1)
- Procrustes AlgorithmDocument11 pagesProcrustes AlgorithmShoukkathAliPas encore d'évaluation
- Submittal ReviewDocument22 pagesSubmittal ReviewuddinnadeemPas encore d'évaluation
- 12.1 ANSYS CompositePrepPostDocument2 pages12.1 ANSYS CompositePrepPostLakmal ArandaraPas encore d'évaluation
- Seminar1final ReviewDocument19 pagesSeminar1final ReviewMounika ChPas encore d'évaluation
- CH Six Global Transportation Planning and ExecutionDocument41 pagesCH Six Global Transportation Planning and ExecutionDsh ShPas encore d'évaluation
- Project Report of Dhanashree Goat FarmDocument56 pagesProject Report of Dhanashree Goat FarmNandan GowdaPas encore d'évaluation
- Cracked Tooth Syndrome. Part 1 Aetiology and DiagnosisDocument17 pagesCracked Tooth Syndrome. Part 1 Aetiology and Diagnosisfloressam2000Pas encore d'évaluation
- Dense NetDocument28 pagesDense NetFahad RazaPas encore d'évaluation
- Study Antimicrobial Activity of Lemon (Citrus Lemon L.) Peel ExtractDocument5 pagesStudy Antimicrobial Activity of Lemon (Citrus Lemon L.) Peel ExtractLoredana Veronica ZalischiPas encore d'évaluation
- Athens 803 and The EkphoraDocument18 pagesAthens 803 and The EkphoradovescryPas encore d'évaluation
- M.E Construction Engineering ManagementDocument43 pagesM.E Construction Engineering ManagementLeilani JohnsonPas encore d'évaluation
- Q3 Module 15Document33 pagesQ3 Module 15jovielyn kathley manaloPas encore d'évaluation
- Idlers: TRF Limited TRF LimitedDocument10 pagesIdlers: TRF Limited TRF LimitedAjit SarukPas encore d'évaluation
- DA-42 Performance Calculator v2.3.1Document23 pagesDA-42 Performance Calculator v2.3.1DodgeHemi1Pas encore d'évaluation
- Eurolite Led TMH 7 PDFDocument2 pagesEurolite Led TMH 7 PDFSarahPas encore d'évaluation
- Proposal Form NagDocument1 pageProposal Form Nagnitheesh kumarPas encore d'évaluation
- The Coffee Shop Easy Reading - 152542Document1 pageThe Coffee Shop Easy Reading - 152542Fc MakmurPas encore d'évaluation
- Barium Chloride 2h2o LRG MsdsDocument3 pagesBarium Chloride 2h2o LRG MsdsAnas GiselPas encore d'évaluation
- AVEVA E3D Tutorial Equipment Modeling With Practical ExampleDocument8 pagesAVEVA E3D Tutorial Equipment Modeling With Practical ExampleRamon Alejandro Porras Hernandez100% (1)
- Ingles y Español Unidad 7Document9 pagesIngles y Español Unidad 7Pier Jhoani Ñañez LlanosPas encore d'évaluation
- Igc 3 Practical NeboshDocument20 pagesIgc 3 Practical NeboshAbdelkader FattouchePas encore d'évaluation
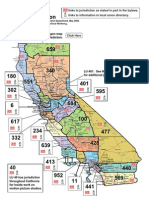
- CA InsideDocument1 pageCA InsideariasnomercyPas encore d'évaluation
- Chemistry - JEE Main 2024 January - Detailed Analysis by MathonGoDocument3 pagesChemistry - JEE Main 2024 January - Detailed Analysis by MathonGoGulam Naziruddin Makandar (NuTHeaD94)Pas encore d'évaluation
- Research On Strip Deformation in The Cage Roll-Forming Process of ERW Round PipesDocument7 pagesResearch On Strip Deformation in The Cage Roll-Forming Process of ERW Round PipesJames PhillipsPas encore d'évaluation
- MPI Report 009 Sub Structure B668Document1 pageMPI Report 009 Sub Structure B668John DolanPas encore d'évaluation
- 020 Basketball CourtDocument4 pages020 Basketball CourtMohamad TaufiqPas encore d'évaluation