Vous aimerez peut-être aussi
- Distribusi Binomial Dan PoissonDocument10 pagesDistribusi Binomial Dan PoissonsriPas encore d'évaluation
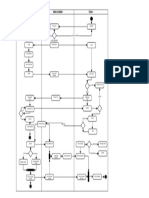
- Activity Diagram Aplikasi Gojek GoRideDocument1 pageActivity Diagram Aplikasi Gojek GoRideNurafni Nur Natsir Alia45% (11)
- 6 PPT DISTRIBUSI PELUANG PDFDocument70 pages6 PPT DISTRIBUSI PELUANG PDFJaman Byen KuPas encore d'évaluation
- Probabilitas 1Document46 pagesProbabilitas 1Mak RufPas encore d'évaluation
- MATERI ProbabilitasDocument37 pagesMATERI ProbabilitasNellaPas encore d'évaluation
- Distribusi Probabilitas 090119Document30 pagesDistribusi Probabilitas 090119Gilang Pratama0% (1)
- Konsep ProbabilitasDocument66 pagesKonsep ProbabilitasUkhtia Aulia AddawiPas encore d'évaluation
- Probabilistic Reasoning PDFDocument21 pagesProbabilistic Reasoning PDFVera AyuPas encore d'évaluation
- 13-Ketidakpastian (Uncertainty) AI B v3.03Document25 pages13-Ketidakpastian (Uncertainty) AI B v3.03JjungPas encore d'évaluation
- Pertemuan 6 Dan 7 Ketidakpastian Uncertainty AI Dan Study KasusDocument47 pagesPertemuan 6 Dan 7 Ketidakpastian Uncertainty AI Dan Study KasusMohamad hananda AlamsyahPas encore d'évaluation
- Ketidakpastian (Uncertainty)Document11 pagesKetidakpastian (Uncertainty)hanif haikalPas encore d'évaluation
- 5 - Quantifying UncertaintyDocument10 pages5 - Quantifying UncertaintyElsa MutiaraPas encore d'évaluation
- Statistika ProbabilitasDocument26 pagesStatistika ProbabilitasAnisa wulanPas encore d'évaluation
- PROBABILITASDocument40 pagesPROBABILITASSandi AgustinPas encore d'évaluation
- KONSEP PROBABILITAS IntanDocument37 pagesKONSEP PROBABILITAS IntanNurdhia Ul MillahPas encore d'évaluation
- Pertemuan 4 Peluang Dan Distribusi PeluangDocument34 pagesPertemuan 4 Peluang Dan Distribusi PeluangMi KyangPas encore d'évaluation
- Pengujian Vektor Rataan-Part1Document80 pagesPengujian Vektor Rataan-Part1Roshan FikriPas encore d'évaluation
- Probabilitas Dan Pendekatan PerhitungannyaDocument3 pagesProbabilitas Dan Pendekatan PerhitungannyaRophinta ViolytaPas encore d'évaluation
- Konsep ProbabilitasDocument20 pagesKonsep ProbabilitasIhsan AkayPas encore d'évaluation
- Statistik Ekonomi Dan Bisnis I: Probabilitas Dan Distribusi NormalDocument26 pagesStatistik Ekonomi Dan Bisnis I: Probabilitas Dan Distribusi NormalRio DarsonoPas encore d'évaluation
- TM3-Teori ProbabilitasDocument40 pagesTM3-Teori ProbabilitasmnurnadhifPas encore d'évaluation
- Teori ProbabilitasDocument29 pagesTeori ProbabilitasDody AryaPas encore d'évaluation
- M 5 ProbabilitasDocument45 pagesM 5 ProbabilitasDidit PurnamaPas encore d'évaluation
- Distribusi PeluangDocument57 pagesDistribusi Peluang20-M-1-35 iqbal prakas fiawanPas encore d'évaluation
- Distribusi ProbabilitasDocument48 pagesDistribusi ProbabilitasNur Padilla LubisPas encore d'évaluation
- Lecture Notes: Random Variables & Probability DistributionsDocument24 pagesLecture Notes: Random Variables & Probability DistributionsklozeesamaPas encore d'évaluation
- Konsep Probabilitas Kelompok 8Document29 pagesKonsep Probabilitas Kelompok 8Jihan Afifah100% (1)
- Pertemuan 1 ProbabilitasDocument30 pagesPertemuan 1 ProbabilitasNikee KeciikkPas encore d'évaluation
- MATERI ProbabilitasDocument37 pagesMATERI ProbabilitasIntan Putri Wirahana ShantyPas encore d'évaluation
- Distribusi ProbabilitasDocument19 pagesDistribusi ProbabilitasArdila JuliantiPas encore d'évaluation
- Distribusi Binomial Dan PoissonDocument34 pagesDistribusi Binomial Dan Poissondindadwi ardilaips2Pas encore d'évaluation
- P (A B) P (A) P (B) .SehinggaDocument13 pagesP (A B) P (A) P (B) .SehinggaBinti RodhiyahPas encore d'évaluation
- Minggu 2 Hitung PeluangDocument44 pagesMinggu 2 Hitung PeluangAdhan Mulya RPas encore d'évaluation
- Teori ProbabilitasDocument7 pagesTeori ProbabilitasSiti Hayatiwi SriwandariPas encore d'évaluation
- Teori ProbabilitasDocument7 pagesTeori ProbabilitasHasna SalsabilaPas encore d'évaluation
- 5 6 - Probabilitas Dan DistribusiDocument48 pages5 6 - Probabilitas Dan DistribusiRohimin Roy DahuriPas encore d'évaluation
- Pertemuan 9 - Statistika Dan ProbabilitasDocument37 pagesPertemuan 9 - Statistika Dan ProbabilitasTeguh Belum SiapPas encore d'évaluation
- EstimasiDocument6 pagesEstimasibeatrichnpPas encore d'évaluation
- Distribusi Probabilitas DiskretDocument27 pagesDistribusi Probabilitas DiskretDina WidiyantiPas encore d'évaluation
- Statiistika Ekonomi Modul 7Document20 pagesStatiistika Ekonomi Modul 7adeliapermata000Pas encore d'évaluation
- Eksperimen Acak Konsep Peluang TP 01.09.14Document43 pagesEksperimen Acak Konsep Peluang TP 01.09.14Widi Toss Muda PurwodadiPas encore d'évaluation
- Materi-3 - UTS - DISTRIBUSI BINOMIAL & POISSONDocument15 pagesMateri-3 - UTS - DISTRIBUSI BINOMIAL & POISSONSurya Agus PurnamaPas encore d'évaluation
- 5 - Teori Probabilitas Dan EstimasiDocument42 pages5 - Teori Probabilitas Dan EstimasiRatna MuliawatiPas encore d'évaluation
- Ai2011 4 Manajemen Ketidakpastian Sistem PakarDocument48 pagesAi2011 4 Manajemen Ketidakpastian Sistem PakarDiah Putu DwijayantiPas encore d'évaluation
- Uji Hipotesis Satu SampelDocument16 pagesUji Hipotesis Satu SampelTengku Ahmad AziziPas encore d'évaluation
- Makalah PeluangDocument18 pagesMakalah PeluangMeong MeongPas encore d'évaluation
- Peubah Acak DiskretDocument26 pagesPeubah Acak Diskretnasya savitriPas encore d'évaluation
- Bab 6 Probabilitas Distribusi TeoritisDocument41 pagesBab 6 Probabilitas Distribusi TeoritisSalsaPas encore d'évaluation
- STATISTIKA DistribusiDiskretDocument37 pagesSTATISTIKA DistribusiDiskretKohler SCRPas encore d'évaluation
- Statistik 03Document80 pagesStatistik 03ᄉ.ᄉPas encore d'évaluation
- Distribusi ProbabilitasDocument38 pagesDistribusi ProbabilitasKomar100% (2)
- Variabel Random DiskritDocument7 pagesVariabel Random DiskritMoh FaraqPas encore d'évaluation
- Teori ProbabilitasDocument7 pagesTeori Probabilitasretno parradillahPas encore d'évaluation
- Bab 5 - Probabilitas Diskrit & KontinuDocument76 pagesBab 5 - Probabilitas Diskrit & KontinuNovo EkaPas encore d'évaluation
- Jiunkpe Is s1 2016 26412067 36988 Android Chapter2Document19 pagesJiunkpe Is s1 2016 26412067 36988 Android Chapter2NaCL ChannelPas encore d'évaluation
- 07 Dan 08 - Teori ProbabilitasDocument38 pages07 Dan 08 - Teori ProbabilitasFirda AureliaPas encore d'évaluation
- LAPORAN PRAKTIKUM STATISTIK Moch - SalimDocument100 pagesLAPORAN PRAKTIKUM STATISTIK Moch - SalimSalim RiantoPas encore d'évaluation
- Bab 1 Probabilitas 1Document16 pagesBab 1 Probabilitas 1Alia uswatunPas encore d'évaluation
- Bahan Ajar Dist Prob Euis 9Document17 pagesBahan Ajar Dist Prob Euis 9Cindy A Febianti SujahlanPas encore d'évaluation
- A. EKA MARDAYANTI - I0111811363 - Karakteristik Peternak Sapi Potong Berdasarkan Sistem Pemeliharaan Di Desa Mattirowalie Kecamatan Tanete Riaja Kabupaten BarruDocument66 pagesA. EKA MARDAYANTI - I0111811363 - Karakteristik Peternak Sapi Potong Berdasarkan Sistem Pemeliharaan Di Desa Mattirowalie Kecamatan Tanete Riaja Kabupaten BarruNurafni Nur Natsir AliaPas encore d'évaluation
- Abstrak Dan Pengantar Pendekatan Algoritma Efisien Apriori Pada Web MiningDocument2 pagesAbstrak Dan Pengantar Pendekatan Algoritma Efisien Apriori Pada Web MiningNurafni Nur Natsir AliaPas encore d'évaluation
- Pendahuluan Improvisasi Paralel Algoritma Apriori Pola Sekunsial Web Usage Mining Secara Real Time Menggunakan Apache SparkDocument3 pagesPendahuluan Improvisasi Paralel Algoritma Apriori Pola Sekunsial Web Usage Mining Secara Real Time Menggunakan Apache SparkNurafni Nur Natsir AliaPas encore d'évaluation
- Hikmah MASTER SKP 2022 AHLI PERTAMADocument36 pagesHikmah MASTER SKP 2022 AHLI PERTAMANurafni Nur Natsir AliaPas encore d'évaluation
- 2.a.14. Review ProsidingDocument3 pages2.a.14. Review ProsidingNurafni Nur Natsir AliaPas encore d'évaluation