Vous aimerez peut-être aussi
- Unit 3 8086 Microprocessor InterfacingDocument29 pagesUnit 3 8086 Microprocessor InterfacingDere JesusPas encore d'évaluation
- 21CS1302 - Camp - Unit 4 NotesDocument41 pages21CS1302 - Camp - Unit 4 Notespec libraryPas encore d'évaluation
- Unit III 8086 Microprocessor InterfacingDocument26 pagesUnit III 8086 Microprocessor InterfacingRammanohar Lokiya100% (1)
- Minimum and Maximum Mode of 8086 of 8086: Sutapa SarkarDocument26 pagesMinimum and Maximum Mode of 8086 of 8086: Sutapa SarkarNishal Bharadwaj NPas encore d'évaluation
- 2-16 Bit Microprocessor 8086Document20 pages2-16 Bit Microprocessor 8086afzal_a75% (4)
- Maximum Mode 8086 SystemDocument9 pagesMaximum Mode 8086 Systemchenna838Pas encore d'évaluation
- Unit 2 8086 System Bus Structures FullunitDocument36 pagesUnit 2 8086 System Bus Structures Fullunitlauro eugin brittoPas encore d'évaluation
- U3 8086 MicroprocessorDocument10 pagesU3 8086 MicroprocessorNishant Singh ChauhanPas encore d'évaluation
- 8086 Section 3-4Document4 pages8086 Section 3-4Jaspreet KaurPas encore d'évaluation
- MIC (22415) UNIT - 1 NotesDocument17 pagesMIC (22415) UNIT - 1 NotesGaurang RanePas encore d'évaluation
- MicroprocessorDocument4 pagesMicroprocessork lakshmi prasannaPas encore d'évaluation
- Features and Modes of 8086Document11 pagesFeatures and Modes of 8086ABHishekPas encore d'évaluation
- 8086 Pin DiagramDocument9 pages8086 Pin Diagram12343567890100% (2)
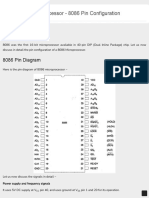
- Microprocessor - 8086 Pin ConfigurationDocument4 pagesMicroprocessor - 8086 Pin ConfigurationShahanasPas encore d'évaluation
- Microprocessor 8086 - Min and Max ModesDocument25 pagesMicroprocessor 8086 - Min and Max ModesE.VigneshPas encore d'évaluation
- Minimum and Maximum ModesDocument21 pagesMinimum and Maximum ModesSubash BasnyatPas encore d'évaluation
- Operating Modes of 8086 MicroprocessorDocument9 pagesOperating Modes of 8086 MicroprocessorMOHAMMED ASLAM CPas encore d'évaluation
- The 8088/8086 Microprocessors and Their Memory and Input/Output InterfaceDocument37 pagesThe 8088/8086 Microprocessors and Their Memory and Input/Output InterfaceKanaan JalalPas encore d'évaluation
- Unit III MPMC MaterialDocument33 pagesUnit III MPMC Materialsree2728Pas encore d'évaluation
- Mic Unit1Document21 pagesMic Unit1xboyxman1000Pas encore d'évaluation
- Chapter 1 BDocument61 pagesChapter 1 Bkshtgarg21Pas encore d'évaluation
- Overview or Features of 8086: It Is A 16-Bit MicroprocessorDocument33 pagesOverview or Features of 8086: It Is A 16-Bit MicroprocessorSamuel KuantumPas encore d'évaluation
- Minimum and Maximum Modes of 8086Document3 pagesMinimum and Maximum Modes of 8086Riya Chaudhary100% (1)
- 8086 Min Max ModesDocument31 pages8086 Min Max ModeschakrimvnPas encore d'évaluation
- 8085 MicroprocessorDocument38 pages8085 MicroprocessorPrateek PandeyPas encore d'évaluation
- Berry B Brey Part IDocument49 pagesBerry B Brey Part Ikalpesh_chandakPas encore d'évaluation
- Mp&i Course File - unit-IIIDocument23 pagesMp&i Course File - unit-IIIvenkateshrachaPas encore d'évaluation
- Signal Groups of 8086Document18 pagesSignal Groups of 8086Macdonald DanielPas encore d'évaluation
- Today's Content: Microprocessor Notes Lecture #1Document15 pagesToday's Content: Microprocessor Notes Lecture #1ayushPas encore d'évaluation
- Pin Config1 SNKDocument6 pagesPin Config1 SNKKirthi RkPas encore d'évaluation
- 8086 Pin DiagramDocument7 pages8086 Pin DiagramTsy Less DahalPas encore d'évaluation
- Panashe Mushinyi H180524V SE Department Microprocessor and Embeded Systems Assignment 1 and 2Document6 pagesPanashe Mushinyi H180524V SE Department Microprocessor and Embeded Systems Assignment 1 and 2panashePas encore d'évaluation
- Minimum and Maximum Mode of 8086Document9 pagesMinimum and Maximum Mode of 8086Ankit KumarPas encore d'évaluation
- 8086 Pin Diagram Here Is The Pin Diagram of 8086 MicroprocessorDocument17 pages8086 Pin Diagram Here Is The Pin Diagram of 8086 MicroprocessorRakesh ChaudhuriPas encore d'évaluation
- Pin Description of 8086Document2 pagesPin Description of 8086kpkrishnaprakas332100% (1)
- 8086 MicroprocessorDocument19 pages8086 MicroprocessorAchyut TripathiPas encore d'évaluation
- Microprocessor - 8086 Pin Configuration - TutorialspointDocument4 pagesMicroprocessor - 8086 Pin Configuration - TutorialspointSadikuzzaman lalinPas encore d'évaluation
- Unit 2 FinalDocument31 pagesUnit 2 Finalswetha bagadi it's good but how it will workPas encore d'évaluation
- Microprocessor (ECC15101)Document10 pagesMicroprocessor (ECC15101)MATAVALAM CHANDU PRIYAPas encore d'évaluation
- Microprocessors: BY: Prof. Dileep J Dept. of TCE K.S.I.TDocument16 pagesMicroprocessors: BY: Prof. Dileep J Dept. of TCE K.S.I.TsenthilPas encore d'évaluation
- Microprocessor and MicroprocessorDocument36 pagesMicroprocessor and Microprocessormondalsudeep222Pas encore d'évaluation
- Microprocessor UNIT-6Document15 pagesMicroprocessor UNIT-6pravin2275767Pas encore d'évaluation
- Unit 2 NotesDocument26 pagesUnit 2 Notesabishek abiPas encore d'évaluation
- 8085 ArchitectureDocument38 pages8085 ArchitectureReethu ParavadaPas encore d'évaluation
- Unit 1 8086 16 Bit MicroprocessorDocument17 pagesUnit 1 8086 16 Bit MicroprocessorManofwarrior100% (1)
- 8086 Min Max Mode Operations ModifiedDocument78 pages8086 Min Max Mode Operations ModifiedRitu RathiPas encore d'évaluation
- 8086 Hardware Specification: Segment 5Document19 pages8086 Hardware Specification: Segment 5Tigabu YayaPas encore d'évaluation
- Ec6504 MPMC Unit 2Document194 pagesEc6504 MPMC Unit 2dkPas encore d'évaluation
- Timimg DiagramDocument27 pagesTimimg DiagramzxcddxzcdzxscPas encore d'évaluation
- An Introduction To 8085: MicroprocessorDocument38 pagesAn Introduction To 8085: MicroprocessorDebashis ChakrabrtyPas encore d'évaluation
- 8086 NotesDocument43 pages8086 NotesSuma LathaPas encore d'évaluation
- Bus TimingDocument12 pagesBus TimingsubramoniantPas encore d'évaluation
- Architecture of 8086: 2.1 (A) Physical Pin DiagramDocument111 pagesArchitecture of 8086: 2.1 (A) Physical Pin DiagrammohuddinPas encore d'évaluation
- System Bus Structure: Minimum Mode 8086 Pin ConfigurationsDocument89 pagesSystem Bus Structure: Minimum Mode 8086 Pin ConfigurationsramprasadPas encore d'évaluation
- 8086 FullDocument72 pages8086 FullNandhini Nachiyar100% (4)
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationD'EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationPas encore d'évaluation
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960D'EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960Pas encore d'évaluation
- Microprocessors and Microcontrollers/Assembly Language of 8086 Multiple Choice QuestionsDocument3 pagesMicroprocessors and Microcontrollers/Assembly Language of 8086 Multiple Choice QuestionsVaibhav GodbolePas encore d'évaluation
- 8086 Addressing Modes: Vaibhav V. GodboleDocument11 pages8086 Addressing Modes: Vaibhav V. GodboleVaibhav GodbolePas encore d'évaluation
- 8086 Addressing Modes: Vaibhav V. GodboleDocument11 pages8086 Addressing Modes: Vaibhav V. GodboleVaibhav GodbolePas encore d'évaluation
- 8051 Microcontroller: Assembly Language ProgrammingDocument23 pages8051 Microcontroller: Assembly Language ProgrammingVaibhav GodbolePas encore d'évaluation
- UC5895Document8 pagesUC5895aniPas encore d'évaluation
- Millett Hybrid Mini MAXDocument3 pagesMillett Hybrid Mini MAXBud DvsPas encore d'évaluation
- University of Ghana: This Paper Contains Two Parts (PART I and PART II) Answer All Questions From Both PARTSDocument3 pagesUniversity of Ghana: This Paper Contains Two Parts (PART I and PART II) Answer All Questions From Both PARTSPhilip Pearce-PearsonPas encore d'évaluation
- 5 - Embedded SystemsDocument53 pages5 - Embedded Systemsحساب ويندوزPas encore d'évaluation
- Qestion#1 Operation of Central Processing UnitDocument3 pagesQestion#1 Operation of Central Processing UnitJunaid KhanPas encore d'évaluation
- Design A Nmos and Pmos Transistor Circuit Using Virtuoso Cadence and Plot I V Characteristics of Pmos and Nmos For Different Gate and Drain VoltagesDocument3 pagesDesign A Nmos and Pmos Transistor Circuit Using Virtuoso Cadence and Plot I V Characteristics of Pmos and Nmos For Different Gate and Drain VoltagesSandeep VermaPas encore d'évaluation
- Atmel AVRDocument17 pagesAtmel AVRrudy_tanagaPas encore d'évaluation
- DD Module-2 Part-2 (Comparator, Encoder, Decoder, Mux)Document43 pagesDD Module-2 Part-2 (Comparator, Encoder, Decoder, Mux)Aneal SinghPas encore d'évaluation
- Lab 01Document4 pagesLab 01Anonymous eWXehpPas encore d'évaluation
- Graph of An Analog Quantity (Temperature Versus Time) .: Figure 1 - 1Document54 pagesGraph of An Analog Quantity (Temperature Versus Time) .: Figure 1 - 1TWChan69Pas encore d'évaluation
- Dlda May19 SolutionDocument23 pagesDlda May19 Solutionpanigrahysagar7Pas encore d'évaluation
- EC2354Document7 pagesEC2354anand787Pas encore d'évaluation
- GAL22V10Document21 pagesGAL22V10jackkairiPas encore d'évaluation
- Alu ArithmeticDocument7 pagesAlu ArithmeticTech-savvy GirishaPas encore d'évaluation
- Computers Are Your Future Inside The System Unit Answers To End-of-Chapter QuestionsDocument8 pagesComputers Are Your Future Inside The System Unit Answers To End-of-Chapter QuestionsUni HayatimPas encore d'évaluation
- VHDL TutorialDocument68 pagesVHDL TutorialPedro Pablo Parra AlbaPas encore d'évaluation
- Combinational Circuits: ALU: AND OR ADD SUB SLT Zero (A B)Document16 pagesCombinational Circuits: ALU: AND OR ADD SUB SLT Zero (A B)anbanePas encore d'évaluation
- Unit 35 Principles and Applications of Electronic Devices and CircuitsDocument10 pagesUnit 35 Principles and Applications of Electronic Devices and CircuitskelvinjPas encore d'évaluation
- Elecs 3Document5 pagesElecs 3Lanbert FranciscoPas encore d'évaluation
- F28335 Gpio PDFDocument2 pagesF28335 Gpio PDFJenniferPas encore d'évaluation
- Ca Lecture 2Document17 pagesCa Lecture 2Nurislam ShouravPas encore d'évaluation
- VLSI Design NotesDocument130 pagesVLSI Design NotesThilakavathi100% (1)
- M15t2g16128a (2L)Document141 pagesM15t2g16128a (2L)Jord primePas encore d'évaluation
- Catalogo 2010Document190 pagesCatalogo 2010kolke16Pas encore d'évaluation
- FDK User Guide V1 1Document75 pagesFDK User Guide V1 1Mahender VeshalaPas encore d'évaluation
- MX25L8005 MxicDocument42 pagesMX25L8005 MxicAnilVarmaPas encore d'évaluation
- Computer Fundamentals: Lab Report # 5Document7 pagesComputer Fundamentals: Lab Report # 5Fariha SaeedPas encore d'évaluation
- Modul E4160 Unit 2 Mikrocontroller Mikro ProcessorDocument12 pagesModul E4160 Unit 2 Mikrocontroller Mikro ProcessorRAJA ARIF SHAH BIN RAJA OSMAN100% (1)
- Ex 3 - Basic Logic Gates and Breadboard FamiliarizationDocument3 pagesEx 3 - Basic Logic Gates and Breadboard FamiliarizationElla GiananPas encore d'évaluation
- Microelectronics MCQs-QuestionsDocument16 pagesMicroelectronics MCQs-QuestionsKimberly TaboraPas encore d'évaluation