Vous aimerez peut-être aussi
- Fusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants.D'EverandFusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants.Pas encore d'évaluation
- Guidage en Rotation Par Roulements (BC)Document9 pagesGuidage en Rotation Par Roulements (BC)MIMFS91% (11)
- Lecture D'un Dessin D'ensembleDocument19 pagesLecture D'un Dessin D'ensembleMIMFS97% (29)
- Pivot Cours 2010Document5 pagesPivot Cours 2010walidbhy100% (1)
- Application 2 ExtrudeuseDocument2 pagesApplication 2 ExtrudeuseHamada Hamada100% (1)
- Embrayages Frein 10 11 12Document7 pagesEmbrayages Frein 10 11 12Heraiz Rachid100% (4)
- Cotation FonctionnelleDocument19 pagesCotation FonctionnelleChayma Gueddari67% (3)
- Cotation FonctionnelleDocument16 pagesCotation FonctionnelleMIMFS90% (10)
- Fonction AssemblageDocument32 pagesFonction AssemblageyahyaouiPas encore d'évaluation
- Série Guidage en Rotation PDFDocument7 pagesSérie Guidage en Rotation PDFTaieb BentaherPas encore d'évaluation
- Les Embrayages Et Les FreinsDocument4 pagesLes Embrayages Et Les FreinsMIMFS88% (17)
- Cours Engrenages PDFDocument5 pagesCours Engrenages PDFHanane Tounsi100% (2)
- TD Vis EcrouDocument3 pagesTD Vis EcrouHoussam Had33% (3)
- Unité Transmettre 1 STE - Partie 2Document50 pagesUnité Transmettre 1 STE - Partie 2Boulette Moulay Hfid96% (24)
- Guidage Par Roulement Applications)Document15 pagesGuidage Par Roulement Applications)MIMFS92% (26)
- Transmission de Puissance Sans Modification de La Vitesse - 2Document12 pagesTransmission de Puissance Sans Modification de La Vitesse - 2lfadli88% (8)
- Cotation FonctionnelleDocument3 pagesCotation FonctionnelleMIMFS100% (3)
- Fonction Guidage en Rotation Par RoulementDocument4 pagesFonction Guidage en Rotation Par RoulementMIMFS100% (7)
- Lecture D'un Dessin D'ensembleDocument3 pagesLecture D'un Dessin D'ensembleMIMFS92% (13)
- Exercices Ajustements - LvesDocument6 pagesExercices Ajustements - LvesNoureddine Hermetien33% (3)
- Présentation Cours Engrenages - Doc ProfDocument8 pagesPrésentation Cours Engrenages - Doc ProfNedrosat89% (9)
- Transmettre-2SMB Eleve 2014Document81 pagesTransmettre-2SMB Eleve 2014mdrougui100% (8)
- Act2 (Tendeur de Courroie) P218-224Document7 pagesAct2 (Tendeur de Courroie) P218-224Fatima Zahra AmalouPas encore d'évaluation
- Cotation Fonctionnelle Bac TunisieDocument12 pagesCotation Fonctionnelle Bac TunisieGana100% (1)
- Transformation de MVTDocument24 pagesTransformation de MVTMIMFS91% (11)
- Guidage en Rotation Par Roulements (BT Et KB)Document6 pagesGuidage en Rotation Par Roulements (BT Et KB)MIMFS67% (12)
- Devoir de Contrôle N°3 - Technologie - TOUR SEMI-AUTOMATIQUE - 3ème Technique (2015-2016) MR Mnejja SlimDocument7 pagesDevoir de Contrôle N°3 - Technologie - TOUR SEMI-AUTOMATIQUE - 3ème Technique (2015-2016) MR Mnejja SlimMed Aymen Bensalem67% (3)
- Système Robo YoupiDocument5 pagesSystème Robo YoupiWalid Fattoum100% (2)
- Guidage en Rotation ApplicationsDocument7 pagesGuidage en Rotation ApplicationsAli Akoumiste100% (4)
- Scie Sauteuse (Application)Document5 pagesScie Sauteuse (Application)MIMFS100% (18)
- F0rmes UsuellesDocument3 pagesF0rmes UsuellesMIMFS89% (19)
- Accouplements Embrayage ApplicationsDocument5 pagesAccouplements Embrayage ApplicationsdjalikadjouPas encore d'évaluation
- Les Engrenages (Cours Bac)Document2 pagesLes Engrenages (Cours Bac)MIMFS86% (43)
- Cours Liaison EncastrementDocument7 pagesCours Liaison EncastrementBIOS_012100% (2)
- Guidage en Translation PDFDocument141 pagesGuidage en Translation PDFkharrat samir100% (1)
- Bride Hydraulique Avec CorrectionDocument3 pagesBride Hydraulique Avec Correctionguymgi79% (24)
- TP 2 Les Liaisons Dans Les Mecanismes Partie 2 Exercice 1 Liaisons MecaniquesDocument13 pagesTP 2 Les Liaisons Dans Les Mecanismes Partie 2 Exercice 1 Liaisons MecaniquesezfPas encore d'évaluation
- Sujet2 - Bride de SerrageDocument4 pagesSujet2 - Bride de SerrageMohsen Laabidi100% (3)
- Eléments de Construction MécaniqueDocument2 pagesEléments de Construction MécaniqueBel Ami100% (2)
- b13 Guidage en RotationDocument7 pagesb13 Guidage en Rotationncibm67% (3)
- Roulement BCDocument6 pagesRoulement BCntayoub89% (9)
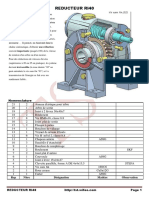
- REDUCTEUR RI40. REDUCTEUR RI40 Page 1. Vis Sans Fin (03) Arbre Creux de SortieDocument6 pagesREDUCTEUR RI40. REDUCTEUR RI40 Page 1. Vis Sans Fin (03) Arbre Creux de SortieFabrigas Kasolo Kalala100% (1)
- Enrouleur+de+ressort+ (Corrigé) 2Document3 pagesEnrouleur+de+ressort+ (Corrigé) 2EL khaldi100% (2)
- 2039751347732511.PDF Construction Mécanique Bac Pro - Livre Professeur - Ed.2010Document62 pages2039751347732511.PDF Construction Mécanique Bac Pro - Livre Professeur - Ed.2010xevni55% (11)
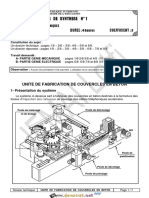
- Devoir de Synthèse N°1 - Génie Mécanique Systeme de Fabrication de Couvercles - Bac Technique (2014-2015) MR LotfiDocument12 pagesDevoir de Synthèse N°1 - Génie Mécanique Systeme de Fabrication de Couvercles - Bac Technique (2014-2015) MR Lotfizxhmnzao100% (2)
- Bride Hydraulique CorrigeDocument4 pagesBride Hydraulique CorrigeSalah Dark80% (5)
- Unité Transmettre 1 STE - Partie 1Document68 pagesUnité Transmettre 1 STE - Partie 1Boulette Moulay Hfid67% (3)
- TD FinaleDocument8 pagesTD Finalewass princePas encore d'évaluation
- 2 - Communication TechniqueDocument90 pages2 - Communication TechniqueAhlèm SààdàouiPas encore d'évaluation
- 31 AccouplementsDocument8 pages31 Accouplementsgrpdhdbcw8Pas encore d'évaluation
- Construction Mécanique - TD Spéciaux - MkaDocument13 pagesConstruction Mécanique - TD Spéciaux - MkaJordan Yakam0% (1)
- Chapitre 3 Guidage Mai 2020Document33 pagesChapitre 3 Guidage Mai 2020Loic ReyesPas encore d'évaluation
- TP Reducteur But GMP1 S2Document10 pagesTP Reducteur But GMP1 S2StringdeGuerrePas encore d'évaluation
- Ilovepdf - Merged (3) - RemovedDocument12 pagesIlovepdf - Merged (3) - RemovedRémiPas encore d'évaluation
- 31 Accouplements PDFDocument9 pages31 Accouplements PDFKhaled SouaissaPas encore d'évaluation
- Technique CCCDocument15 pagesTechnique CCCNÖÚ HÄPas encore d'évaluation
- Cours Accouplements BonDocument8 pagesCours Accouplements BonNzaou LucreshPas encore d'évaluation
- ds1 0506 PDFDocument14 pagesds1 0506 PDFzaouia ayoubPas encore d'évaluation
- Travaux DirigesDocument32 pagesTravaux Dirigestarik outalPas encore d'évaluation
- Devoir de Contrôle N°1 - Génie Mécanique - UNITE DE FABRICATION DE DALLES DE BETON - Bac Technique (2016-2017) MR Bakini Noomen PDFDocument7 pagesDevoir de Contrôle N°1 - Génie Mécanique - UNITE DE FABRICATION DE DALLES DE BETON - Bac Technique (2016-2017) MR Bakini Noomen PDFAdil El AzzouziPas encore d'évaluation
- Transformation Des Mvts ApplicationDocument4 pagesTransformation Des Mvts ApplicationMIMFS50% (2)
- Transmission (Annexe BAC)Document10 pagesTransmission (Annexe BAC)MIMFS100% (1)
- Formulaire de MécaniqueDocument11 pagesFormulaire de MécaniqueMIMFS91% (11)
- F0rmes UsuellesDocument3 pagesF0rmes UsuellesMIMFS89% (19)
- Les Engrenages (Cours Bac)Document2 pagesLes Engrenages (Cours Bac)MIMFS86% (43)
- Chariot Micro Tour (Act 3-3)Document1 pageChariot Micro Tour (Act 3-3)MIMFS100% (1)
- Transformation Des Mvts 10-11Document4 pagesTransformation Des Mvts 10-11MIMFS100% (2)
- Scie Sauteuse (Application)Document5 pagesScie Sauteuse (Application)MIMFS100% (18)
- Transformation de MVTDocument24 pagesTransformation de MVTMIMFS91% (11)
- Correction (Chariot Longitudinal) (Act 2-3)Document1 pageCorrection (Chariot Longitudinal) (Act 2-3)MIMFS100% (1)
- Correction (Articulation en Porte À Faux) (Act 5-3)Document1 pageCorrection (Articulation en Porte À Faux) (Act 5-3)MIMFS67% (3)
- La Torsion Simple (Cours Bac)Document3 pagesLa Torsion Simple (Cours Bac)MIMFS82% (11)
- Articulation en Porte À Faux (Act5-5)Document1 pageArticulation en Porte À Faux (Act5-5)MIMFS100% (1)
- Correction (Chariot Tour) (Act3-3)Document1 pageCorrection (Chariot Tour) (Act3-3)MIMFSPas encore d'évaluation
- Chariot Longitudinal Micro-Fraiseuse (Act 2-3)Document1 pageChariot Longitudinal Micro-Fraiseuse (Act 2-3)MIMFS50% (2)
- Poupée Mobile (Act 1-3)Document1 pagePoupée Mobile (Act 1-3)MIMFSPas encore d'évaluation
- Liaison Encastrement1Document14 pagesLiaison Encastrement1MIMFS100% (1)
- Correction (Act1-3)Document1 pageCorrection (Act1-3)MIMFSPas encore d'évaluation
- Joint de Cardant Et AccouplementDocument4 pagesJoint de Cardant Et AccouplementMIMFS100% (1)
- Les Eléments StandardDocument6 pagesLes Eléments StandardMIMFS100% (1)
- Guidage en Rotation Par RoulementDocument2 pagesGuidage en Rotation Par RoulementMIMFS100% (1)
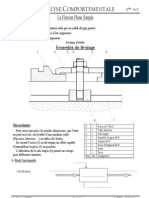
- La Flexion Plane Simple (Cours 3 SCT)Document4 pagesLa Flexion Plane Simple (Cours 3 SCT)MIMFS92% (12)
- Application+Flexions+10 11Document2 pagesApplication+Flexions+10 11ntayoubPas encore d'évaluation
- Fonction Guidage en Rotation Par RoulementDocument4 pagesFonction Guidage en Rotation Par RoulementMIMFS100% (7)
- Les Embrayages Et Les FreinsDocument4 pagesLes Embrayages Et Les FreinsMIMFS88% (17)
- Organisation Fonctionnelle D'un ProduitDocument2 pagesOrganisation Fonctionnelle D'un ProduitMIMFSPas encore d'évaluation
- Lecture D'un Dessin D'ensembleDocument3 pagesLecture D'un Dessin D'ensembleMIMFS92% (13)
- Cotation FonctionnelleDocument3 pagesCotation FonctionnelleMIMFS100% (3)
- Désignation Des MatériauxDocument5 pagesDésignation Des MatériauxMIMFS100% (8)
- Ion Fonctionnelle D'un ProduitDocument17 pagesIon Fonctionnelle D'un ProduitMIMFS100% (1)
- Lingnierie de FormationDocument4 pagesLingnierie de FormationhamzaPas encore d'évaluation
- Bakhtine Le Roman Et L IntertexteDocument34 pagesBakhtine Le Roman Et L IntertexteKyle LloydPas encore d'évaluation
- Groupe Électrogène Diesel Industriel - 50 HZ: Caractéristiques Générales KOHLER, Haute QualitéDocument9 pagesGroupe Électrogène Diesel Industriel - 50 HZ: Caractéristiques Générales KOHLER, Haute QualitéMohamed Bachir EL GHRIBPas encore d'évaluation
- 3300 StasDocument11 pages3300 Stasimmobilière providencePas encore d'évaluation
- Examen de Contrôle 2015 - M1-Evaluation & Fusions (Enoncé Et Corrigé)Document5 pagesExamen de Contrôle 2015 - M1-Evaluation & Fusions (Enoncé Et Corrigé)kais kaPas encore d'évaluation
- Correction TD ch2013Document2 pagesCorrection TD ch2013MohamedAbidaPas encore d'évaluation
- TP1 Banc Hydraulique Volumetrique: - IntroductionDocument3 pagesTP1 Banc Hydraulique Volumetrique: - Introductionzaidzd8Pas encore d'évaluation
- Correcteur PIDDocument8 pagesCorrecteur PIDSalem FaresPas encore d'évaluation
- Passage D Un Moteur 4D56 100cv en 115cvDocument20 pagesPassage D Un Moteur 4D56 100cv en 115cvKhelefi OussamaPas encore d'évaluation
- Optimisez Votre Plate-Forme LogistiqueDocument674 pagesOptimisez Votre Plate-Forme LogistiqueK B-g B-g100% (4)
- Fiche Extraction DentaireDocument2 pagesFiche Extraction DentaireFzPas encore d'évaluation
- Lettre de Motivation PONTICELLI Vithushan PRAHASPATHYDocument1 pageLettre de Motivation PONTICELLI Vithushan PRAHASPATHYFdd FddfdPas encore d'évaluation
- Comnum 1Document14 pagesComnum 1Pj le WelpiPas encore d'évaluation
- 04 Exos Derivabilite ConvexiteDocument3 pages04 Exos Derivabilite ConvexiteRamirez BlascoPas encore d'évaluation
- Corrige E2 Juin 2009Document26 pagesCorrige E2 Juin 2009Houcine RtimiPas encore d'évaluation
- Bilan Social PDFDocument46 pagesBilan Social PDFidrissa dioum100% (3)
- P251 Activités DétailléesDocument10 pagesP251 Activités DétailléesAsma LakhalPas encore d'évaluation
- Analyses Physico-Chimiques de L'eau D'irrigation - Contribution À La Mise en Place de La Norme ISO 17025:2017Document71 pagesAnalyses Physico-Chimiques de L'eau D'irrigation - Contribution À La Mise en Place de La Norme ISO 17025:2017Abbassi100% (1)
- PaddAn2 PaddAn2 - Vocabulaire Mathématiques - Calcul de BaseDocument24 pagesPaddAn2 PaddAn2 - Vocabulaire Mathématiques - Calcul de BasePaddAn2 PaddAn2Pas encore d'évaluation
- Rapport de StageDocument57 pagesRapport de StageTãdj ĘddïnėPas encore d'évaluation
- 150823Document2 pages150823Sainte Marie des VignesPas encore d'évaluation
- Harnais de SécuritéDocument1 pageHarnais de SécuritéLiban AimoulPas encore d'évaluation
- Corr QUIZ 1Document10 pagesCorr QUIZ 1slim yaichPas encore d'évaluation
- Corrigé Cahier de Fin Dannée (Démos + Conjectures)Document9 pagesCorrigé Cahier de Fin Dannée (Démos + Conjectures)wiliamli888Pas encore d'évaluation
- Le Solaire Photovoltaïque Raccordé Au RéseauDocument31 pagesLe Solaire Photovoltaïque Raccordé Au Réseausalem BEN MOUSSA100% (1)
- Design 13112002Document96 pagesDesign 13112002Kiki Riki Miki100% (1)
- Chemin de Croix Du Temps de Carême 2024Document88 pagesChemin de Croix Du Temps de Carême 2024osvaldoPas encore d'évaluation
- Conduites Forgées: M. /uguste Bouchayer, Surles Conduites Métalliques, L'auDocument6 pagesConduites Forgées: M. /uguste Bouchayer, Surles Conduites Métalliques, L'aulhabsPas encore d'évaluation
- Cours Optique Chap 2Document14 pagesCours Optique Chap 2Sellé GueyePas encore d'évaluation
- Chapitre I Regression Simple 2015 2016Document78 pagesChapitre I Regression Simple 2015 2016oumPas encore d'évaluation