Vous aimerez peut-être aussi
- Introduction to Reliable and Secure Distributed ProgrammingD'EverandIntroduction to Reliable and Secure Distributed ProgrammingPas encore d'évaluation
- Assignment Coa Wase Wims2019Document8 pagesAssignment Coa Wase Wims2019RAHUL KUMAR RPas encore d'évaluation
- VHDL Lecture Notes - NavabiDocument556 pagesVHDL Lecture Notes - NavabiNishant Chaudhari100% (2)
- Caesar Cipher TutorialDocument7 pagesCaesar Cipher TutorialVineetSinghPas encore d'évaluation
- Concurrency: Mutual Exclusion and Synchronization: Operating Systems: Internals and Design PrinciplesDocument61 pagesConcurrency: Mutual Exclusion and Synchronization: Operating Systems: Internals and Design PrinciplesRamadan ElhendawyPas encore d'évaluation
- DSECL ZG 522: Big Data Systems: Session 2: Parallel and Distributed SystemsDocument58 pagesDSECL ZG 522: Big Data Systems: Session 2: Parallel and Distributed SystemsSwati BhagavatulaPas encore d'évaluation
- Mpi Openmp ExamplesDocument27 pagesMpi Openmp ExamplesDeepak K NambiarPas encore d'évaluation
- System Models For Distributed and Cloud ComputingDocument15 pagesSystem Models For Distributed and Cloud ComputingSubrahmanyam SudiPas encore d'évaluation
- Install OpenMPI in LinuxDocument5 pagesInstall OpenMPI in LinuxDummyofindiaIndiaPas encore d'évaluation
- Instructions:: Q1. Answer The Following Questions: (Marks 10)Document3 pagesInstructions:: Q1. Answer The Following Questions: (Marks 10)Zoha MobinPas encore d'évaluation
- Routinemap Patterns of Life in Spatiotemporal VisualizationDocument10 pagesRoutinemap Patterns of Life in Spatiotemporal Visualizationapi-305338429Pas encore d'évaluation
- CP5191 Machine Learning Techniques L T P C3 0 0 3Document7 pagesCP5191 Machine Learning Techniques L T P C3 0 0 3indumathythanik933Pas encore d'évaluation
- Is Zc415 (Data Mining BITS-WILP)Document4 pagesIs Zc415 (Data Mining BITS-WILP)Anonymous Lz6f4C6KFPas encore d'évaluation
- CS9223 - ADVANCED SYSTEM SOFTWARE Question Paper - Anna UniversityDocument2 pagesCS9223 - ADVANCED SYSTEM SOFTWARE Question Paper - Anna UniversityNithya Preya SreetharanPas encore d'évaluation
- Deep C ModifiedDocument449 pagesDeep C ModifiedAmit DubeyPas encore d'évaluation
- GPUDocument17 pagesGPUJayanti SinghPas encore d'évaluation
- AiDocument82 pagesAiPhani KumarPas encore d'évaluation
- CUDA C Programming Guide PDFDocument405 pagesCUDA C Programming Guide PDFMarius IonitaPas encore d'évaluation
- SIMD PresentationDocument28 pagesSIMD PresentationHuzaifaPas encore d'évaluation
- Algorithm Questions and Complexity AnalysisDocument5 pagesAlgorithm Questions and Complexity Analysismohammed nasrPas encore d'évaluation
- EE6602 Embedded Systems Lecture NotesDocument115 pagesEE6602 Embedded Systems Lecture NotesJayamurugan MookkanPas encore d'évaluation
- Lecture 1 - IntroductionDocument6 pagesLecture 1 - IntroductionAndrei BâcuPas encore d'évaluation
- 15cs204j-Algorithm Design and AnalysisDocument3 pages15cs204j-Algorithm Design and AnalysisAnugrah SinghalPas encore d'évaluation
- Parallel Computers 2 - Architecture, Programming and Algorithms PDFDocument642 pagesParallel Computers 2 - Architecture, Programming and Algorithms PDFasdf adsfPas encore d'évaluation
- Ics2307 Simulation and ModellingDocument79 pagesIcs2307 Simulation and ModellingOloo PunditPas encore d'évaluation
- Operating Systems (MCQ)Document26 pagesOperating Systems (MCQ)Mian Hasham Azhar AZHARPas encore d'évaluation
- 2 Marks With AnswersDocument14 pages2 Marks With Answersprisci_durai83% (6)
- DAA Manual (2021-2022)Document66 pagesDAA Manual (2021-2022)Aditya Aryan100% (1)
- (2007) - The Aesthetics of Graph VisualizationDocument8 pages(2007) - The Aesthetics of Graph VisualizationGJ SavarisPas encore d'évaluation
- Why bus protocol is importantDocument4 pagesWhy bus protocol is importantashar565Pas encore d'évaluation
- Error Detection and Correction Techniques in Computer NetworksDocument27 pagesError Detection and Correction Techniques in Computer NetworksMurthy RamaniPas encore d'évaluation
- Operating System Notes 3 - TutorialsDuniya PDFDocument232 pagesOperating System Notes 3 - TutorialsDuniya PDFKhalid RehmanPas encore d'évaluation
- Algorithm Analysis Document TitleDocument485 pagesAlgorithm Analysis Document TitleNiraj PatilPas encore d'évaluation
- Artificial Intelligence Questions & Answers - Agents: Join @mcqs - SppuDocument892 pagesArtificial Intelligence Questions & Answers - Agents: Join @mcqs - SppuPiyush KhadkePas encore d'évaluation
- Artificial Intelligence - Based Multiopath Transmission Model For WSN Energy EfficiencyDocument11 pagesArtificial Intelligence - Based Multiopath Transmission Model For WSN Energy EfficiencyIJAR JOURNAL100% (1)
- Continuous Integration - From Theory To PracticeDocument61 pagesContinuous Integration - From Theory To PracticepavanimopuriPas encore d'évaluation
- Quiz Chapter 4 CPUDocument3 pagesQuiz Chapter 4 CPUAnthony PistonPas encore d'évaluation
- CH-9 Web Application Development PDFDocument1 pageCH-9 Web Application Development PDFJay SandukePas encore d'évaluation
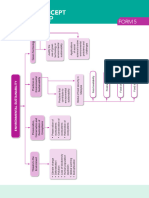
- F5C10 Concept MapDocument1 pageF5C10 Concept MapLeena bsb.Pas encore d'évaluation
- MPI Library Code ExamplesDocument8 pagesMPI Library Code ExamplesŞaban ŞekerPas encore d'évaluation
- Big Data & Business Intelligence: Presented by Binh Nguyen - Luong DinhDocument24 pagesBig Data & Business Intelligence: Presented by Binh Nguyen - Luong Dinhgsrao_9Pas encore d'évaluation
- Burrows-Wheeler Transform - Wikipedia, The Free EncyclopediaDocument10 pagesBurrows-Wheeler Transform - Wikipedia, The Free EncyclopediaRakesh InaniPas encore d'évaluation
- 6.unit I 2 MarksDocument3 pages6.unit I 2 MarksprasanthprpPas encore d'évaluation
- MMX Unit 1Document33 pagesMMX Unit 1Pawan Kumar ThakurPas encore d'évaluation
- Designing and Building Parallel ProgramsDocument371 pagesDesigning and Building Parallel ProgramsasadfxPas encore d'évaluation
- Security of Internet of ThingsDocument4 pagesSecurity of Internet of ThingsKannan AlagumuthiahPas encore d'évaluation
- 29-2 CDocument8 pages29-2 Canon_621618677Pas encore d'évaluation
- MCQ Question Bank Class: TE Sub:-Esiot Unit-Iv: Department of Computer Engineering Academic Year - 2019-20 SEM - IIDocument9 pagesMCQ Question Bank Class: TE Sub:-Esiot Unit-Iv: Department of Computer Engineering Academic Year - 2019-20 SEM - IIGaneshKendrePas encore d'évaluation
- Data-Parallel Architectures andDocument27 pagesData-Parallel Architectures andAmeed UddinPas encore d'évaluation
- Artificial Neural NetworksDocument43 pagesArtificial Neural NetworksanqrwpoborewPas encore d'évaluation
- RMD Sinhagad School of Engineering: Unit: 01 ES Overview (MCQ)Document4 pagesRMD Sinhagad School of Engineering: Unit: 01 ES Overview (MCQ)Spiderspider2021Pas encore d'évaluation
- Cs1352 Compiler DesignDocument9 pagesCs1352 Compiler Designsindhana100% (1)
- Data Link LayerDocument50 pagesData Link LayerBindhya BibinPas encore d'évaluation
- Neural Networks Applications Pattern Recognition ClassificationDocument2 pagesNeural Networks Applications Pattern Recognition Classificationtkec_csedeptPas encore d'évaluation
- AI & Expert System ch12Document13 pagesAI & Expert System ch12Ahmed HamdyPas encore d'évaluation
- Iot Communication ProtocolsDocument27 pagesIot Communication ProtocolsSimrandeep SinghPas encore d'évaluation
- Deep Neural Network ASICs The Ultimate Step-By-Step GuideD'EverandDeep Neural Network ASICs The Ultimate Step-By-Step GuidePas encore d'évaluation
- Introduction to Machine Learning in the Cloud with Python: Concepts and PracticesD'EverandIntroduction to Machine Learning in the Cloud with Python: Concepts and PracticesPas encore d'évaluation
- Physics RefractionDocument15 pagesPhysics RefractionFelicity O' MalleyPas encore d'évaluation
- A39 MP Exp 4Document7 pagesA39 MP Exp 4Devesh RajbharPas encore d'évaluation
- Sharp Lc32wd1e LCDDocument202 pagesSharp Lc32wd1e LCDMarkPas encore d'évaluation
- Please DocuSign Tax Certificate of Foreign S PDFDocument6 pagesPlease DocuSign Tax Certificate of Foreign S PDFRent rochorPas encore d'évaluation
- ESS reporting & analysis toolDocument9 pagesESS reporting & analysis toolHemavathi Hema100% (1)
- Civil Engineering Report GuidelinesDocument14 pagesCivil Engineering Report GuidelinesjinshadPas encore d'évaluation
- Intelligent Systems in Big Data, Semantic Web and Machine LearningDocument6 pagesIntelligent Systems in Big Data, Semantic Web and Machine LearningRachid BelfaqihPas encore d'évaluation
- 436Document18 pages436Nikhil Sharma MadhuPas encore d'évaluation
- A Simple and Effective Method For Filling Gaps in Landsat ETM+ SLC-off ImagesDocument12 pagesA Simple and Effective Method For Filling Gaps in Landsat ETM+ SLC-off ImagesJanos HidiPas encore d'évaluation
- HAMEG FA Oscilloscopes Why Analog EDocument2 pagesHAMEG FA Oscilloscopes Why Analog EGeorgePas encore d'évaluation
- Splunk 4.2.3 AdminDocument426 pagesSplunk 4.2.3 AdminjazzymoonPas encore d'évaluation
- Yamaha NU1 MIDI Control CodesDocument6 pagesYamaha NU1 MIDI Control CodesisothermPas encore d'évaluation
- Heavy OilDocument6 pagesHeavy Oilsnikraftar1406Pas encore d'évaluation
- Windows 10 Home Windows 10 HomeDocument9 pagesWindows 10 Home Windows 10 Homeगणेश पराजुलीPas encore d'évaluation
- Datasheet - Netscout-Tap-FamilyDocument5 pagesDatasheet - Netscout-Tap-FamilyKelvin PattyPas encore d'évaluation
- Ecg Based Heart Rate Monitoring System Implementation Using Fpga For Low Power Devices and Applications PDFDocument5 pagesEcg Based Heart Rate Monitoring System Implementation Using Fpga For Low Power Devices and Applications PDFesatjournalsPas encore d'évaluation
- JNTUK CSE R-20 SyllabusDocument11 pagesJNTUK CSE R-20 Syllabusnovio333Pas encore d'évaluation
- IFE ZazoAguiar Comics PDFDocument18 pagesIFE ZazoAguiar Comics PDFArk'BenTrek True BluesPas encore d'évaluation
- Finite Element Methods: Lecture Module 1-1: IntroductionDocument35 pagesFinite Element Methods: Lecture Module 1-1: IntroductionAhmad Faidhi100% (1)
- Omron Sysmac WayDocument40 pagesOmron Sysmac WayAurellioPas encore d'évaluation
- Abbreviations of Names of References Used in Mathematical ReviewsDocument32 pagesAbbreviations of Names of References Used in Mathematical ReviewsSanti KunduPas encore d'évaluation
- Erased Log by SosDocument2 pagesErased Log by SosStefanPas encore d'évaluation
- MCS-012 Block 2Document102 pagesMCS-012 Block 2Abhishek VeerkarPas encore d'évaluation
- Neuromeasure 5 User'S ManualDocument14 pagesNeuromeasure 5 User'S ManualGokulPas encore d'évaluation
- Business Level Strategy of GrameenphoneDocument11 pagesBusiness Level Strategy of GrameenphoneummahshafiPas encore d'évaluation
- Adina LipaiDocument7 pagesAdina LipaiAdriana CalinPas encore d'évaluation
- Revision Notes - HardwareDocument18 pagesRevision Notes - HardwaremuhammadPas encore d'évaluation
- Bank StatmentDocument41 pagesBank StatmentManager VikasNagar 22Pas encore d'évaluation
- Introduction To Computing Fundamentals of ICT Week 1-2Document21 pagesIntroduction To Computing Fundamentals of ICT Week 1-2Ronald Cambil Jr.Pas encore d'évaluation
- OMEN by HP 17 Laptop PC: Maintenance and Service GuideDocument99 pagesOMEN by HP 17 Laptop PC: Maintenance and Service GuideGustavo TorresPas encore d'évaluation