Vous aimerez peut-être aussi
- Examen TP 2013-2014Document12 pagesExamen TP 2013-2014Wassim Ben SalahPas encore d'évaluation
- Pression de Contact PDFDocument6 pagesPression de Contact PDFKaiser46Li206Pas encore d'évaluation
- TP 11Document14 pagesTP 11elfahime ELFAHIMEPas encore d'évaluation
- 04 Traitement Thermique FINDocument13 pages04 Traitement Thermique FINHamza ElallamPas encore d'évaluation
- TH8430 PDFDocument73 pagesTH8430 PDFfaouzi sellaliPas encore d'évaluation
- Pression de Contact HertzDocument11 pagesPression de Contact HertztarekhocinePas encore d'évaluation
- Chapitre 2 - Pression de Contact LocaliséeDocument11 pagesChapitre 2 - Pression de Contact Localiséeسيف الدين يعقوبيPas encore d'évaluation
- TribologieDocument108 pagesTribologieAbdullah GharibPas encore d'évaluation
- 6Document264 pages6Bleu OiseauPas encore d'évaluation
- CH2 Tribologie 1Document10 pagesCH2 Tribologie 1Mehdi BoumaouchePas encore d'évaluation
- La TribologieDocument6 pagesLa TribologieFayza BelkhoudirPas encore d'évaluation
- Frottement Et LubrificationDocument16 pagesFrottement Et LubrificationArsel NghedjoPas encore d'évaluation
- Hiebel Denis smz8722Document147 pagesHiebel Denis smz8722mahmoudmain_24273317Pas encore d'évaluation
- TribologieDocument2 pagesTribologieeumesmo200401Pas encore d'évaluation
- Chapitre 1 TribologieDocument25 pagesChapitre 1 TribologiemezziPas encore d'évaluation
- Corrige 1Document7 pagesCorrige 1M YacinePas encore d'évaluation
- Chapitre2 ElecDocument45 pagesChapitre2 ElecYahya KhaïzouranePas encore d'évaluation
- Tribologie M1 Construction MécDocument75 pagesTribologie M1 Construction MécDjamalPas encore d'évaluation
- Acro3 PDFDocument9 pagesAcro3 PDFÉzéchiel CompaoréPas encore d'évaluation
- Chapitre 4 EngrenagesDroitsDocument20 pagesChapitre 4 EngrenagesDroitsKaram QaoubPas encore d'évaluation
- Cours ElectrocinetiqueDocument76 pagesCours ElectrocinetiqueHarena RalalaharisoaPas encore d'évaluation
- Essai de TractionDocument4 pagesEssai de Tractionsaded05Pas encore d'évaluation
- Examen Statique Des Solides 2013Document7 pagesExamen Statique Des Solides 2013vinc giniPas encore d'évaluation
- Généralité Sur L'usureDocument9 pagesGénéralité Sur L'usureFarah FindriPas encore d'évaluation
- TDs Calcul Structures - Corrigé 2212 - 231222 - 143922Document7 pagesTDs Calcul Structures - Corrigé 2212 - 231222 - 143922anasidy4Pas encore d'évaluation
- (Analyse) Etau de Fraiseuse - e JMDocument3 pages(Analyse) Etau de Fraiseuse - e JMmarouf aek100% (3)
- A 3 Suspension AvantDocument6 pagesA 3 Suspension AvantjuanlestonPas encore d'évaluation
- 8 - EngrenageyhkDocument62 pages8 - EngrenageyhkFédyHamdiPas encore d'évaluation
- Bac 2019 Corrigé Sciences Ingenieur SDocument4 pagesBac 2019 Corrigé Sciences Ingenieur SAnonymous gTF3XOgPas encore d'évaluation
- 1 Binaires RDocument100 pages1 Binaires ROuday Chikhaoui100% (1)
- Modelisation Des Liaisons MecaniquesDocument5 pagesModelisation Des Liaisons MecaniquesayatextPas encore d'évaluation
- Soudage MIG/MAG Pulsés: Roland CAZESDocument2 pagesSoudage MIG/MAG Pulsés: Roland CAZESguessous100% (1)
- Cours 1Document13 pagesCours 1Jonathan BataillePas encore d'évaluation
- TN06 PDFDocument34 pagesTN06 PDFMa HdiPas encore d'évaluation
- Chapitre4 CisaillementDocument9 pagesChapitre4 CisaillementDawoud MayoufPas encore d'évaluation
- Equilibrage Statique Et Dynamique Des Machines RotativesDocument9 pagesEquilibrage Statique Et Dynamique Des Machines RotativesKader DziriPas encore d'évaluation
- 9500 PDFDocument9 pages9500 PDFhidra bedhiafiPas encore d'évaluation
- CH03 - Etude Des ContraintesDocument8 pagesCH03 - Etude Des ContraintesSERGIOPas encore d'évaluation
- Devoir de Synthèse N°2 - Math - Bac Sciences Exp (2011-2012) MR Maatallah - pdf1Document2 pagesDevoir de Synthèse N°2 - Math - Bac Sciences Exp (2011-2012) MR Maatallah - pdf1Mohamed SaidiPas encore d'évaluation
- Exercice ThermoDocument4 pagesExercice ThermoEgon Dan Emmanuel TchicayaPas encore d'évaluation
- TDDocument14 pagesTDYassir Ez-znafryPas encore d'évaluation
- Exercice Corrigés D'engrenages - Construction MécaniqueDocument7 pagesExercice Corrigés D'engrenages - Construction MécaniqueEmmanuel TchouyaPas encore d'évaluation
- Support Cours RDM PR KissiDocument135 pagesSupport Cours RDM PR KissiyassinePas encore d'évaluation
- T A A T A U: Exercice 1Document5 pagesT A A T A U: Exercice 1moha heroPas encore d'évaluation
- CH2 Vibration Mécanique 2020 2021Document74 pagesCH2 Vibration Mécanique 2020 2021mahdiPas encore d'évaluation
- CR MDFDocument24 pagesCR MDFIsmail BennajibPas encore d'évaluation
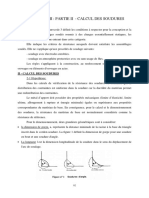
- Chapitre 8 Partie 2 - CALCUL DES SOUDURESDocument8 pagesChapitre 8 Partie 2 - CALCUL DES SOUDURESCara mellaPas encore d'évaluation
- Rdmtorseurdecohesion PDFDocument4 pagesRdmtorseurdecohesion PDFMustafa MoussaouiPas encore d'évaluation
- 17 - Mécanique Du SolideDocument8 pages17 - Mécanique Du SolideIngenieur EnsaPas encore d'évaluation
- Cristall o Graph I eDocument15 pagesCristall o Graph I eWPas encore d'évaluation
- RMChap5 (Cisaillement) PDFDocument33 pagesRMChap5 (Cisaillement) PDFsoufyanPas encore d'évaluation
- Statique Graphique 4 Forces CulmanDocument14 pagesStatique Graphique 4 Forces CulmanmohammedPas encore d'évaluation
- Examens Et SolutionsDocument24 pagesExamens Et Solutionsfaid ossamaPas encore d'évaluation
- TD Attache eDocument4 pagesTD Attache entayoubPas encore d'évaluation
- Cours de Mecanique Resistance Des MateriauxDocument46 pagesCours de Mecanique Resistance Des MateriauxDavid parolePas encore d'évaluation
- + TD Transmission 3 Etude ReducteurDocument3 pages+ TD Transmission 3 Etude ReducteurMahrez ZaafouriPas encore d'évaluation
- Polycopie Moodle 13Document160 pagesPolycopie Moodle 13Abderrahmen AridhiPas encore d'évaluation
- 6202Document53 pages6202MohamedAmineDabachiPas encore d'évaluation
- La Geometrie Descriptive PDFDocument23 pagesLa Geometrie Descriptive PDFIsmail SalahPas encore d'évaluation
- Goupille SLTP FRDocument8 pagesGoupille SLTP FRaleaubrPas encore d'évaluation
- Interférence - Correction de Denture.: D'engrènementDocument4 pagesInterférence - Correction de Denture.: D'engrènementaleaubrPas encore d'évaluation
- Comment Devenir Un As en Calcul MentalDocument15 pagesComment Devenir Un As en Calcul MentalaleaubrPas encore d'évaluation
- These ParedesDocument222 pagesThese ParedesaleaubrPas encore d'évaluation
- MMCDocument72 pagesMMCKhouloud RahaliPas encore d'évaluation
- Chap. II. Modélisation Des Mécanismes (Liaisons Mécaniques) : Fig. II.1. Liaison PonctuelleDocument12 pagesChap. II. Modélisation Des Mécanismes (Liaisons Mécaniques) : Fig. II.1. Liaison PonctuelleSaber DjedaiPas encore d'évaluation
- Théorie Des Mécanismes - Cours1Document16 pagesThéorie Des Mécanismes - Cours1Mounaim MatiniPas encore d'évaluation
- Laguna MRMOTK4M PDFDocument75 pagesLaguna MRMOTK4M PDFtriadouPas encore d'évaluation
- Om5004 2be3-4 FR 20150617Document66 pagesOm5004 2be3-4 FR 20150617Brahim ABAGHOUGHPas encore d'évaluation
- Manuel Tondeuse Kubota W621HTCDocument59 pagesManuel Tondeuse Kubota W621HTCNeko NenessPas encore d'évaluation
- Pi Seilzug de en FR 03 2013Document200 pagesPi Seilzug de en FR 03 2013Nicolas Alvarez GomezPas encore d'évaluation
- M05 Diagnostic D - Un Système de Refroidissement Et de LubrificationDocument75 pagesM05 Diagnostic D - Un Système de Refroidissement Et de LubrificationAngel Son100% (3)
- Mécanique Hub Toolbox - Valves de Réglage Et Injecteurs CAT 3116 Diesel EngineDocument3 pagesMécanique Hub Toolbox - Valves de Réglage Et Injecteurs CAT 3116 Diesel Enginebrahim100% (5)
- Module Freinage Classique (Technologie 1ere)Document24 pagesModule Freinage Classique (Technologie 1ere)Amadou HIMA DjabirouPas encore d'évaluation
- Synthese Sur Les Moteurs Electriques (VF) Nyebe Ndongo Jeanne MichelleDocument34 pagesSynthese Sur Les Moteurs Electriques (VF) Nyebe Ndongo Jeanne MichelleMichelle NyebePas encore d'évaluation
- Cours Guidage en Translation p17Document7 pagesCours Guidage en Translation p17Jesuis Content0% (1)
- CLIO Homologation Form Number 5433 Group A 1 PDFDocument157 pagesCLIO Homologation Form Number 5433 Group A 1 PDFjoris pascalPas encore d'évaluation
- 03 Section EMDocument56 pages03 Section EMdidier_cassettePas encore d'évaluation
- AllumageDocument35 pagesAllumageOMARKHAN21Pas encore d'évaluation
- 2014-04-FR ENTRETIEN Et MAINTENANCEDocument80 pages2014-04-FR ENTRETIEN Et MAINTENANCEGuillaume VassardPas encore d'évaluation
- Moteur Asynchrone TriphaséDocument11 pagesMoteur Asynchrone Triphasémhenaoui100% (1)
- 14000350-Allumage Racing Factory DERBIDocument3 pages14000350-Allumage Racing Factory DERBIGérôme ZélateurPas encore d'évaluation
- 5924 Ni 92252200Document108 pages5924 Ni 92252200Touhami MimounPas encore d'évaluation
- Exercices de Statique TSI 1Document31 pagesExercices de Statique TSI 1Mamoun DrissiPas encore d'évaluation
- 437 S Freins 725 730Document28 pages437 S Freins 725 730Chakroune100% (1)
- M08 Démont Réparation Et Remontage Des CompresseursDocument54 pagesM08 Démont Réparation Et Remontage Des CompresseursFarid Aoulad100% (1)
- CIRCUIT DE LUBRIFICATION DE LA BTPDocument3 pagesCIRCUIT DE LUBRIFICATION DE LA BTPPédro GONZALEZPas encore d'évaluation
- Instruction FRDocument14 pagesInstruction FRAmar BoukherchaPas encore d'évaluation
- Rapport de Stage Kabore MahamadiDocument49 pagesRapport de Stage Kabore MahamadiIbrahim Kabore100% (1)
- Exo 04 05 Stat Liaison Equiv Cor PDFDocument4 pagesExo 04 05 Stat Liaison Equiv Cor PDFJourdan MbappePas encore d'évaluation
- Grupo G 40Document54 pagesGrupo G 40Mq ArriendosPas encore d'évaluation
- Tbleau AMDECDocument5 pagesTbleau AMDECAhmedPas encore d'évaluation
- 03 EncastrementDocument19 pages03 Encastrementahmed lebbarPas encore d'évaluation
- Moteur À Combusion InterneDocument8 pagesMoteur À Combusion InterneOuardia ShmPas encore d'évaluation
- Rapport de Stage de Bobinage ELDocument26 pagesRapport de Stage de Bobinage ELPiter0% (1)