Vous aimerez peut-être aussi
- TD GrafcetDocument10 pagesTD GrafcetBOUALAOUIPas encore d'évaluation
- Poly TD SAPDocument18 pagesPoly TD SAPOussama BeddaPas encore d'évaluation
- Exercices Sur GrafcetDocument27 pagesExercices Sur Grafcetsamer matoussiPas encore d'évaluation
- TD3 - Automatisme IndustrielDocument7 pagesTD3 - Automatisme IndustrielFifi La MarionnettePas encore d'évaluation
- TD Grafcet PDFDocument10 pagesTD Grafcet PDFlahssane hmidatPas encore d'évaluation
- Poly TD API PDFDocument10 pagesPoly TD API PDFKhadija HajadePas encore d'évaluation
- td4 Grafcet Avec SolutionDocument8 pagestd4 Grafcet Avec SolutionAmina Lazreg100% (1)
- Fiche TD 2 - 3 - 4 - Avec Solution-ConvertiDocument11 pagesFiche TD 2 - 3 - 4 - Avec Solution-ConvertiDINE HABIBEPas encore d'évaluation
- Grafcet Avec Choix de Séquences Exercices Corrigés - CopieDocument22 pagesGrafcet Avec Choix de Séquences Exercices Corrigés - CopieAris ABOUGHEPas encore d'évaluation
- TD GrafcetDocument4 pagesTD GrafcetPro Perfec50% (4)
- Grafcet Et Automatismes IndustrielsDocument17 pagesGrafcet Et Automatismes IndustrielsBen Mekki Houcine100% (2)
- Examen 4eme-GrafcetDocument4 pagesExamen 4eme-GrafcetYahya BouaalalaPas encore d'évaluation
- Grafcet Elt 3 PDFDocument7 pagesGrafcet Elt 3 PDFnawzat100% (9)
- TD Grafcet EmiDocument26 pagesTD Grafcet EmibrahimPas encore d'évaluation
- Grafcet TDDocument5 pagesGrafcet TDWided MaghraouiPas encore d'évaluation
- Exercises Grafcet CorrigesDocument4 pagesExercises Grafcet CorrigesLuk Grijan100% (1)
- Graf Cet Exercice SDocument15 pagesGraf Cet Exercice Sdarknight0% (1)
- DS Grafcet Logique Combinatoire CORRECTIONDocument7 pagesDS Grafcet Logique Combinatoire CORRECTIONchaouch.najeh100% (2)
- td4 Sur Chapitre 2. Le GrafcetDocument27 pagestd4 Sur Chapitre 2. Le Grafcetعبد الكريم ملوحPas encore d'évaluation
- Travaux Dirigés PDFDocument9 pagesTravaux Dirigés PDFmarwen0% (2)
- td1 AutomatismeDocument6 pagestd1 AutomatismeDhoha GasmiaPas encore d'évaluation
- TD Grafcet 1Document5 pagesTD Grafcet 1khawlaaaa50% (4)
- Exercice de Sti Automatisme Bac BlancDocument5 pagesExercice de Sti Automatisme Bac BlancElmokh Lassaad0% (1)
- TD1Document2 pagesTD1Jaouad El0% (3)
- Grafcet ExercicesDocument15 pagesGrafcet Exercicesياسين بوعيشي57% (7)
- TD GrafcetDocument6 pagesTD GrafcetJovy BernyPas encore d'évaluation
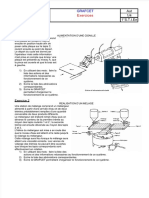
- Automatisation D'une Cisaille Systeme Etudie Alimentation D'Une CisailleDocument10 pagesAutomatisation D'une Cisaille Systeme Etudie Alimentation D'Une CisailleMăř ØűãPas encore d'évaluation
- 03 Chapitre 1Document5 pages03 Chapitre 1Firas FirasPas encore d'évaluation
- GrafcetDocument8 pagesGrafcetNabilBouabanaPas encore d'évaluation
- Exercice 1 Grafcet-Api PDFDocument3 pagesExercice 1 Grafcet-Api PDFMouhcine Zianee100% (1)
- TD Api05022019Document10 pagesTD Api05022019Mohamed FathallahPas encore d'évaluation
- Exercice 1 Grafcet-Api PDFDocument3 pagesExercice 1 Grafcet-Api PDFYassine Hnada67% (3)
- Examen-Corr GrafcetDocument4 pagesExamen-Corr GrafcetFatimazahrae AB100% (1)
- TD2Document4 pagesTD2Abdallah Grima33% (3)
- Perc AutoDocument4 pagesPerc Autoyaccine100% (1)
- Etude de Cas Grafcet Step7Document7 pagesEtude de Cas Grafcet Step7noussaier100% (2)
- TD2 Sur Chapitre 2. Le GrafcetDocument7 pagesTD2 Sur Chapitre 2. Le GrafcetMa Jhoul0% (1)
- ChariotsDocument2 pagesChariotskhalid elmarzakPas encore d'évaluation
- Exercice Navette TransporteurDocument2 pagesExercice Navette Transporteuryaccine82% (11)
- TP 01-API .L3 AutomatiqueDocument19 pagesTP 01-API .L3 Automatiqueothmane ABDELADIMPas encore d'évaluation
- Les Systèmes AutomatisésDocument70 pagesLes Systèmes Automatisésl mPas encore d'évaluation
- 05exercices GrafcetDocument4 pages05exercices Grafcetnajlae alfathiPas encore d'évaluation
- Contrôle #1 Automates Programmables Industriels: Exercice 1Document2 pagesContrôle #1 Automates Programmables Industriels: Exercice 1Mimo Moo100% (1)
- EXAMENAutomatismeDocument1 pageEXAMENAutomatismegringo yeso100% (1)
- TD1 Grafcet 2023 2024Document12 pagesTD1 Grafcet 2023 2024naimibtissam01Pas encore d'évaluation
- GRAFCET D'un Point de Vue PCDocument3 pagesGRAFCET D'un Point de Vue PCkhocine50% (2)
- GRAFCETDocument5 pagesGRAFCETFatima BettayebPas encore d'évaluation
- Exam API Seer-Gecsi 2020-2021Document4 pagesExam API Seer-Gecsi 2020-2021Safae AbdelmounimPas encore d'évaluation
- Grafcet Resume de CoursDocument7 pagesGrafcet Resume de CoursImen Ayachi100% (1)
- API - Cours RésuméDocument32 pagesAPI - Cours RésuméalmahfoudelfadiliPas encore d'évaluation
- Grafcet Elt 4 PDFDocument7 pagesGrafcet Elt 4 PDFnawzat80% (5)
- Grafcet Elt 5 PDFDocument3 pagesGrafcet Elt 5 PDFnawzatPas encore d'évaluation
- GrafcetDocument2 pagesGrafcetYassine Abouelhouda80% (5)
- TD - GRAFCET - TextMarkDocument36 pagesTD - GRAFCET - TextMarkWafa BenzaouiPas encore d'évaluation
- td2 Grafcet 115416Document6 pagestd2 Grafcet 115416boooy179Pas encore d'évaluation
- AiguillageDocument7 pagesAiguillageGasmi Mostapha El HadiPas encore d'évaluation
- GRAFCETDocument4 pagesGRAFCETjonePas encore d'évaluation
- GRAFCETDocument24 pagesGRAFCETmonstersounds1Pas encore d'évaluation
- Exos GrafcetDocument26 pagesExos GrafcetRuben Yav100% (2)
- TD CpiDocument6 pagesTD CpiPatrick Juvet Gnetchejo100% (1)
- Langage Et Programmation STEP7 PDFDocument1 pageLangage Et Programmation STEP7 PDFMed ElbanadiPas encore d'évaluation
- Notions Fondamentales Sur Le Démarrage Des MoteursDocument43 pagesNotions Fondamentales Sur Le Démarrage Des Moteursdegdoug100% (1)
- Telecommande Disj SchneiderDocument2 pagesTelecommande Disj SchneiderMed ElbanadiPas encore d'évaluation
- Fil NumDocument18 pagesFil NumMed ElbanadiPas encore d'évaluation
- 1 Analyse FonctionnelleDocument14 pages1 Analyse FonctionnelleASSINIE100% (1)
- 6 PID Pression S7Document2 pages6 PID Pression S7OthmaneRealMadridPas encore d'évaluation
- 852 Preparer Entretien27567 PDFDocument32 pages852 Preparer Entretien27567 PDFSimo El AzaarPas encore d'évaluation
- Automatismes Manipulations BleuDocument34 pagesAutomatismes Manipulations BleuMed ElbanadiPas encore d'évaluation
- Matlab& DSP& MASDocument38 pagesMatlab& DSP& MASBALLOUK SoufianePas encore d'évaluation
- Syn These Filt ReDocument8 pagesSyn These Filt ReMed ElbanadiPas encore d'évaluation
- Data 237Document21 pagesData 237Med ElbanadiPas encore d'évaluation
- Correction-Exercice Abaque de SmithDocument2 pagesCorrection-Exercice Abaque de SmithMed Elbanadi100% (6)
- Gestion de ConflitsDocument7 pagesGestion de ConflitsMed ElbanadiPas encore d'évaluation
- Pert ApplicationsDocument4 pagesPert Applicationsevey51150% (8)
- Exercice Structure SapDocument1 pageExercice Structure SapMed ElbanadiPas encore d'évaluation
- Assainissement02 130606125811 Phpapp01Document75 pagesAssainissement02 130606125811 Phpapp01Benhmaida HananPas encore d'évaluation
- ÉlectrozingageDocument7 pagesÉlectrozingagekehihaPas encore d'évaluation
- Technique GSMDocument13 pagesTechnique GSMSiddo NajimPas encore d'évaluation
- Rapport-Climat YassineDocument12 pagesRapport-Climat YassineMuhcinePas encore d'évaluation
- Parametrage IncendieDocument26 pagesParametrage IncendieAmmar BoufaressPas encore d'évaluation
- Plan Du Cours - Géologie GénéraleDocument3 pagesPlan Du Cours - Géologie GénéraleYasser GéologuePas encore d'évaluation
- Kais LM SafranDocument1 pageKais LM SafranKais MansourPas encore d'évaluation
- Aspersor Maxi-Paw Rain Bird Instrucciones.Document1 pageAspersor Maxi-Paw Rain Bird Instrucciones.A M P RoaPas encore d'évaluation
- Machine À Laver Danube Aide Au Diagnostic ASEP-CS Avec D1500.a FRDocument6 pagesMachine À Laver Danube Aide Au Diagnostic ASEP-CS Avec D1500.a FRBetina NdjiemiPas encore d'évaluation
- FICHE DE MAINTENANCE D'APPAREIL A GAZ CALYDRA 23 FF Et 28 FFDocument8 pagesFICHE DE MAINTENANCE D'APPAREIL A GAZ CALYDRA 23 FF Et 28 FFpayPas encore d'évaluation
- Session D'examens: Date Examen ModuleDocument3 pagesSession D'examens: Date Examen ModuleHakim BilPas encore d'évaluation
- TP VoIPDocument14 pagesTP VoIPIsmailovic ChernicovPas encore d'évaluation
- 9624 Fiche Sequence Ci Maintenance Diagnostic Et Mise Au Point Des Elements de Liaison Au SolDocument3 pages9624 Fiche Sequence Ci Maintenance Diagnostic Et Mise Au Point Des Elements de Liaison Au SolKarim AzzPas encore d'évaluation
- 88-4 Modelisation de L'interactionDocument9 pages88-4 Modelisation de L'interactionFikar KassimPas encore d'évaluation
- Automatic Identification SystemDocument42 pagesAutomatic Identification SystemIdriss KnadelPas encore d'évaluation
- Foxit PhantomPDF - Quick Guide PDFDocument34 pagesFoxit PhantomPDF - Quick Guide PDFraex_innoPas encore d'évaluation
- Securité Chap5Document3 pagesSecurité Chap5Lilya ChaatalPas encore d'évaluation
- Tutor I El Google DriveDocument21 pagesTutor I El Google DrivejropartPas encore d'évaluation
- Output 5.TextMarkDocument14 pagesOutput 5.TextMarkSolhi EssaidPas encore d'évaluation
- Béton Précontraint - Techniques de Mise en Oeuvre PDFDocument34 pagesBéton Précontraint - Techniques de Mise en Oeuvre PDFNacer Assam75% (4)
- Tamimount AmineDocument86 pagesTamimount AmineZu Yad100% (1)
- Batisexpo Batimatec 2021 WebDocument16 pagesBatisexpo Batimatec 2021 WebDj@melPas encore d'évaluation
- CfguklllllnbbnDocument24 pagesCfguklllllnbbnXaymae75% (4)
- TD AopDocument5 pagesTD AopFritz NGUEMO100% (1)
- IntroductionDocument2 pagesIntroductionFifi JojoPas encore d'évaluation
- tp001 - MuseureDocument8 pagestp001 - MuseureCLUB-IBDAA-ME Univ MilaPas encore d'évaluation
- Chapitre 3 Les Dimensions Temporelle Et Budgétaire de La Gestion de ProjetDocument38 pagesChapitre 3 Les Dimensions Temporelle Et Budgétaire de La Gestion de Projetzabala kamalaPas encore d'évaluation
- MGC 00021Document196 pagesMGC 00021TIGNEGRE YacoubaPas encore d'évaluation
- Rapport de Stage Olivier BATTINI Final PDFDocument66 pagesRapport de Stage Olivier BATTINI Final PDFEl Abess FekirPas encore d'évaluation
- 2 TavDocument58 pages2 TavAya SaidiPas encore d'évaluation