Vous aimerez peut-être aussi
- 12-Basic Knowledge of LDO Voltage Regulator enDocument19 pages12-Basic Knowledge of LDO Voltage Regulator enKirti Susan VarghesePas encore d'évaluation
- DSPDocument57 pagesDSPhamidr_karamiPas encore d'évaluation
- Behzad Razavi Fundamentals of Microelectronics Solution ManualDocument8 pagesBehzad Razavi Fundamentals of Microelectronics Solution ManualKaranPas encore d'évaluation
- Mixed Signal TestDocument14 pagesMixed Signal TestperiodoPas encore d'évaluation
- An Introduction to the Theory of Microwave CircuitsD'EverandAn Introduction to the Theory of Microwave CircuitsK. KurokawaPas encore d'évaluation
- Advanced MOS Device PhysicsD'EverandAdvanced MOS Device PhysicsNorman EinspruchPas encore d'évaluation
- (Domine M.W. Leenaerts) Circuit Design For RF Tran (BookFi)Document350 pages(Domine M.W. Leenaerts) Circuit Design For RF Tran (BookFi)Krishna PrasadPas encore d'évaluation
- Discrimination & Back-Up Protection: Page 1 of 9 The Guide - MEM Technical SupportDocument9 pagesDiscrimination & Back-Up Protection: Page 1 of 9 The Guide - MEM Technical SupportRukawa528Pas encore d'évaluation
- Semiconductor Devices The Ultimate Step-By-Step GuideD'EverandSemiconductor Devices The Ultimate Step-By-Step GuidePas encore d'évaluation
- 101 Testing VlsiDocument21 pages101 Testing VlsiRonnie MagsinoPas encore d'évaluation
- Phase-locked loops synchronize signals and generate frequenciesDocument11 pagesPhase-locked loops synchronize signals and generate frequenciesLadmirIllitchenPas encore d'évaluation
- Beamex White Paper - Pt100 Temperature Sensor ENGDocument8 pagesBeamex White Paper - Pt100 Temperature Sensor ENGJGlobexPas encore d'évaluation
- CircuitsDocument474 pagesCircuitsSriramPas encore d'évaluation
- DC DC Book of Knowledge Practical Tips FDocument287 pagesDC DC Book of Knowledge Practical Tips Fvict57Pas encore d'évaluation
- Advanced Techniques For Digital Receivers - Nivin RDocument40 pagesAdvanced Techniques For Digital Receivers - Nivin Rjothi_murugan_4Pas encore d'évaluation
- High Speed Integrated Circuit TechnologyDocument372 pagesHigh Speed Integrated Circuit TechnologyZied Houaneb100% (1)
- Energy-Efficient CMOS Voltage Level Shifters With single-VDD For Multicore ApplicationsDocument7 pagesEnergy-Efficient CMOS Voltage Level Shifters With single-VDD For Multicore ApplicationsArvind ChakrapaniPas encore d'évaluation
- Introduction To EMC: Electronic ComponentsDocument26 pagesIntroduction To EMC: Electronic ComponentsLakshitha Prabath WijesinghePas encore d'évaluation
- High Speed Digital Design: Design of High Speed Interconnects and SignalingD'EverandHigh Speed Digital Design: Design of High Speed Interconnects and SignalingPas encore d'évaluation
- Multimeter ReportDocument15 pagesMultimeter Reportapi-244226518Pas encore d'évaluation
- Sample 7440Document11 pagesSample 7440Tanmay PandaPas encore d'évaluation
- SiC WoflspeedDocument40 pagesSiC WoflspeedRakesh Sandarativju100% (1)
- Layout Techniques and Examples in Analog VLSI Circuit DesignDocument74 pagesLayout Techniques and Examples in Analog VLSI Circuit DesignKesani Venkat Narsimha ReddyPas encore d'évaluation
- VLSI Electronics: Microstructure ScienceD'EverandVLSI Electronics: Microstructure ScienceÉvaluation : 5 sur 5 étoiles5/5 (1)
- Making More Accurate Jitter Measurements: D R J U H PDocument13 pagesMaking More Accurate Jitter Measurements: D R J U H PBeth Beth DiancoPas encore d'évaluation
- UCLA's Behzad Razavi Awarded 2012 Donald O. Pederson PrizeDocument4 pagesUCLA's Behzad Razavi Awarded 2012 Donald O. Pederson PrizewearolePas encore d'évaluation
- Spice Convergence Troubleshooting (BEST)Document18 pagesSpice Convergence Troubleshooting (BEST)Alexandre PennaPas encore d'évaluation
- Fundamentals of High-Speed Digital DesignDocument446 pagesFundamentals of High-Speed Digital Designjrobertz3475% (4)
- Silicon Integrated CircuitsD'EverandSilicon Integrated CircuitsDawon KahngÉvaluation : 4 sur 5 étoiles4/5 (1)
- Digital Signal Processing - Principles, Devices, and ApplicationsDocument426 pagesDigital Signal Processing - Principles, Devices, and ApplicationsSuhail JainPas encore d'évaluation
- MMIC Design Flow Using ADSDocument64 pagesMMIC Design Flow Using ADSphithuc0% (1)
- COILPITTS Ali Hajimiri, Thomas H. Lee - The Design of Low Noise Oscillators (1999, Kluwer Academic Publishers) PDFDocument220 pagesCOILPITTS Ali Hajimiri, Thomas H. Lee - The Design of Low Noise Oscillators (1999, Kluwer Academic Publishers) PDFMilPas encore d'évaluation
- Two Stage CMOS Op Amp - Seid PDFDocument79 pagesTwo Stage CMOS Op Amp - Seid PDFTayachew BerhanPas encore d'évaluation
- Understanding Phase-Locked Loops (PLLsDocument40 pagesUnderstanding Phase-Locked Loops (PLLspalakPas encore d'évaluation
- LT Spice Basic Simulation ExerciseDocument6 pagesLT Spice Basic Simulation ExerciseJoshua OrlandaPas encore d'évaluation
- Introduction To Signal Integrity: MahajanDocument14 pagesIntroduction To Signal Integrity: MahajanAbhijit MahajanPas encore d'évaluation
- CMOS Front-End Electronics For Radiation SensorsDocument713 pagesCMOS Front-End Electronics For Radiation SensorsBoris RibovPas encore d'évaluation
- App Note 7nm - v7Document23 pagesApp Note 7nm - v7NelarapuMaheshPas encore d'évaluation
- HEV-EV Traction Inverter Power Stage With 3 Types of IGBT-SiC Bias-Supply Solutions Reference DesignDocument98 pagesHEV-EV Traction Inverter Power Stage With 3 Types of IGBT-SiC Bias-Supply Solutions Reference DesigndinhquangcdtbkPas encore d'évaluation
- Electronic Devices and Circuits: In Three VolumesD'EverandElectronic Devices and Circuits: In Three VolumesÉvaluation : 3.5 sur 5 étoiles3.5/5 (2)
- VHDL InformationDocument21 pagesVHDL Informationreddykishoreece100% (1)
- Ibis Switch ModelingDocument122 pagesIbis Switch ModelingteomondoPas encore d'évaluation
- VLSI Design Lecture Notes for B.Tech IV Year ISEM StudentsDocument115 pagesVLSI Design Lecture Notes for B.Tech IV Year ISEM Studentsyuvaraaj aletiPas encore d'évaluation
- Matrix Converter ThesisDocument148 pagesMatrix Converter ThesisHollie Rosa100% (1)
- Low-Dropout Voltage Regulator (LDO)Document30 pagesLow-Dropout Voltage Regulator (LDO)jashvenepally100% (1)
- Microprocessor Architecture GuideDocument79 pagesMicroprocessor Architecture GuideKen Andrie Dungaran GuariñaPas encore d'évaluation
- Analog MultiplexerDocument13 pagesAnalog MultiplexerSanjoy PandaPas encore d'évaluation
- Xilinx Training CoursesDocument16 pagesXilinx Training Coursesnocaries9300Pas encore d'évaluation
- Conference Presentation SRAM DesignDocument22 pagesConference Presentation SRAM DesignDương Tuấn KiệtPas encore d'évaluation
- Current Mode Controller Design For Single Phase Grid Connected Inverter Using Proportional Resonant Control StrategyDocument6 pagesCurrent Mode Controller Design For Single Phase Grid Connected Inverter Using Proportional Resonant Control StrategyijeteeditorPas encore d'évaluation
- Analog and Digital Electronics PDFDocument34 pagesAnalog and Digital Electronics PDFJatinPas encore d'évaluation
- Integrated CircuitDocument21 pagesIntegrated CircuitahmedPas encore d'évaluation
- Course Info-Theory of ED&CDocument3 pagesCourse Info-Theory of ED&Csami ullah saleemPas encore d'évaluation
- ES6425FF: Details PDFDocument1 pageES6425FF: Details PDFjose antonio iglesias infantesPas encore d'évaluation
- Eec 234Document25 pagesEec 234Adetayo Salawu86% (7)
- CM305Document14 pagesCM305api-3853441Pas encore d'évaluation
- RoHS Compliant N-Channel Enhancement Mode FETDocument6 pagesRoHS Compliant N-Channel Enhancement Mode FETTom TomPas encore d'évaluation
- Notes Module2 (FET Part) Basic Electronics 22BBEE203Document12 pagesNotes Module2 (FET Part) Basic Electronics 22BBEE203Hani MPas encore d'évaluation
- 01375013Document8 pages01375013이은지Pas encore d'évaluation
- Chapter 9 MemoryDocument28 pagesChapter 9 MemoryBinod ManandharPas encore d'évaluation
- EC NotesDocument2 pagesEC Noteshanumantha12Pas encore d'évaluation
- Cadence Virtuoso layout of minimum size CMOS inverterDocument11 pagesCadence Virtuoso layout of minimum size CMOS inverterNavid Anjum AaditPas encore d'évaluation
- Controlling Threshold Voltage with Work Function MetalsDocument8 pagesControlling Threshold Voltage with Work Function MetalsPranita SwainPas encore d'évaluation
- SSTPAD and Diode Part Number Reference GuideDocument8 pagesSSTPAD and Diode Part Number Reference GuideGeorge UrdeaPas encore d'évaluation
- Talukdar2019 Article ANovelExtendedSourceTFETWithΔpDocument9 pagesTalukdar2019 Article ANovelExtendedSourceTFETWithΔpkavicharan MummaneniPas encore d'évaluation
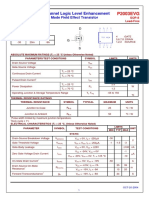
- P2003EVG Niko-Sem: P-Channel Logic Level EnhancementDocument5 pagesP2003EVG Niko-Sem: P-Channel Logic Level EnhancementNeto CunhaPas encore d'évaluation
- Silicon NPN Darlington Power Transistors: DescriptionDocument3 pagesSilicon NPN Darlington Power Transistors: DescriptionVictor HemzPas encore d'évaluation
- TE Electrical Engineering Power Electronics, Electromagnetic EngineeringDocument53 pagesTE Electrical Engineering Power Electronics, Electromagnetic EngineeringPiyush ChaudhariPas encore d'évaluation
- Quiz 1 - 1 Model AnswerDocument2 pagesQuiz 1 - 1 Model AnswerMaher Gomaa IsmaeelPas encore d'évaluation
- Chapter 5 (CWWU Memory Testing)Document180 pagesChapter 5 (CWWU Memory Testing)yaminiPas encore d'évaluation
- Fermi-Level Pinning and Charge Neutrality Level in GermaniumDocument4 pagesFermi-Level Pinning and Charge Neutrality Level in Germaniumbabu aggarwalPas encore d'évaluation
- Orosz-Ussr Russian Semiconductor Cross-ReferenceDocument8 pagesOrosz-Ussr Russian Semiconductor Cross-ReferenceNikolett GyalogPas encore d'évaluation
- Mosfet EbdDocument9 pagesMosfet EbdSrikanth PudhariPas encore d'évaluation
- FChapter 9 - Memory Design in 68KDesignDocument22 pagesFChapter 9 - Memory Design in 68KDesignShashitharan PonnambalanPas encore d'évaluation
- Sahl stock list document with parts numbers and descriptionsDocument123 pagesSahl stock list document with parts numbers and descriptionsAnonymous t8U6sKtYSPas encore d'évaluation
- CMOS IC Design for Analog CircuitsDocument2 pagesCMOS IC Design for Analog CircuitsVijay UrkudePas encore d'évaluation
- 4.4.6.4 Voltage Dependence: Chapter 4 DelayDocument1 page4.4.6.4 Voltage Dependence: Chapter 4 DelayCarlos SaavedraPas encore d'évaluation
- Common-Base ConfigurationDocument10 pagesCommon-Base ConfigurationRakin Mohammad SifullahPas encore d'évaluation
- CMOS VLSI and Aspect of ASIC DesignDocument3 pagesCMOS VLSI and Aspect of ASIC DesignBittU BhagatPas encore d'évaluation
- 3U VNB PED-Unit-IDocument113 pages3U VNB PED-Unit-IgautamPas encore d'évaluation
- Power Electronics - Chapter 2 - Power Switching DevicesDocument31 pagesPower Electronics - Chapter 2 - Power Switching Deviceskennedy kipsangPas encore d'évaluation