Académique Documents
Professionnel Documents
Culture Documents
Trasmissione e Regolazione Del Moto Rotatorio
Transféré par
dpiperis1118Titre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Trasmissione e Regolazione Del Moto Rotatorio
Transféré par
dpiperis1118Droits d'auteur :
Formats disponibles
Dispensa a cura del Prof. D. Piperis - ITIS G.
Marconi - Bari - Corso Serale Progetto Sirio 1
ITIS G. MARCONI BARI
CORSO SERALE PROGETTO SIRIO
A. S. 2009-2010
DISPENSA DI MECCANICA APPLICATA ALLE MACCHINE
N 7
TRASMISSIONE E REGOLAZIONE DEL MOTO ROTATORIO
Meccanismo di biella e manovella
Volani
Regolatori
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 2
MECCANISMO DI BIELLA E MANOVELLA
un sistema articolato utilizzato nelle macchine motrici (p. es. motori endotermici) e
operatrici (p. es. compressori alternativi) per la trasmissione della potenza con trasformazione del
moto da rettilineo alternato a rotatorio e viceversa (nei motori endotermici, il moto rettilineo
alternato del pistone viene trasformato nel moto circolare dellalbero a gomiti). Il manovellismo
pu essere di tipo centrato oppure disassato, a seconda che lasse del cilindro intersechi o meno
lasse di rotazione della manovella (albero motore) (v. fig. 1).
Gli elementi meccanici componenti il manovellismo sono rappresentati nella fig. 1:
La biella costituita dal corpo, testa e piede di biella. Il corpo pu avere sezione a doppio
T (motori endotermici), rettangolare, circolare o tubolare.
La manovella costituita dal braccio e dal perno (bottone di manovella).
La fig. 2, invece, mostra uno schema del meccanismo adatto per farne lo studio sia
cinematico sia dinamico:
Pistone
Corpo di biella
Braccio di manovella
Albero motore
Testa di biella
Spinotto
piede di biella
Contrappeso
Bottone di manovella
Fig. 1 Meccanismo di biella e manovella centrato.
Fig. 2 Schema del meccanismo di biella e manovella.
corsa del pistone
|
0
manovella
biella
O
PMS PMI
bottone di manovella
Piede di biella
Cappello di biella
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 3
Il moto rettilineo alternato del pistone si compie tra il punto morto superiore (PMS) e il
punto morto inferiore (PMI). Tale distanza chiamata corsa del pistone ed uguale al diametro
della circonferenza descritta dal bottone di manovella durante il suo moto circolare, cio uguale al
doppio del raggio di manovella. Il moto della manovella rotatorio mentre quello della biella
rototraslatorio.
STUDIO CINEMATICO
Per fare questo studio riferiamoci allo schema cinematico in fig. n. 3 dove sono state
riportate le varie grandezze fisiche coinvolte:
Legenda:
OB = manovella
BP = biella
C
1
C
2
= corsa del pistone
C
1
P = spostamento del pistone al tempo t
r = raggio di manovella
l = lunghezza di biella
c = distanza percorsa dal piede di biella in mezzo giro (cio dal PMS al PMI)
x
P
= distanza percorsa dal piede di biella al tempo t
0 = angolo di manovella
| = angolo di biella
e = velocit angolare della manovella
Il moto del bottone di manovella si considera circolare uniforme e, pertanto, risultano
costanti velocit angolare e velocit periferica del bottone di manovella:
e = 2tn = cost
v
B
= er = cost
Il moto del piede di biella rettilineo alternato vario, vale a dire:
v
P
= cost
Fig. 3 Grandezze caratteristiche del meccanismo di biella e manovella.
c = 2r
C
1
C
2
P
|
0
r
l
B
B'
O
x
P
PMS PMI
|
0
PMS
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 4
Ricaviamo le leggi del moto del piede di biella. Dapprima ricaviamo la formula della
distanza x
P
dalla quale, derivando rispetto al tempo, ricaveremo la velocit e laccelerazione.
Con semplici considerazioni geometriche dallo schema in fig. 3 ricaviamo lespressione di
x
P
:
P C x
P 1
=
(
+ =
= + = + = + + = =
) cos 1 ( cos 1
) cos 1 ( ) cos 1 ( cos cos ) ' ' (
1 1
| 0
0 | 0 |
r
l
r
r l r l r l O B P B r l OP OC P C
Il rapporto l/r si indica con =310 (lunghezza ridotta della biella) pertanto, sostituendo
tale parametro nella formula si ha:
| | ) cos 1 ( cos 1 | 0 + = r x
P
(1)
La formula (1) esprime x
P
in funzione sia di 0 sia di | mentre sarebbe pi utile che x
P
sia
espressa in funzione soltanto di 0. Per fare ci consideriamo i triangoli rettangoli BB'P e BB'O. Essi
hanno in comune il lato BB' che pu, pertanto, essere espresso in funzione sia di 0 sia di |:
| 0 lsen rsen BB = = '
da cui:
0
0 | sen sen
l
r
sen
1
= = (2)
adesso, ricordando la nota relazione trigonometrica: 1 cos
2 2
= + | | sen possiamo sostituire in
questa al posto di sen| la relazione (2) ottenendosi:
1 cos )
1
(
2 2
= + | 0
sen
1 cos
1
2 2
2
= + | 0
sen
da cui ricaviamo:
2
2 2
2
2
2
1 cos
0
|
sen sen
= =
e infine, estraendo la radice quadrata del 1 e 2 membro e portando fuori dal segno di radice il
denominatore della frazione si ricava:
0
|
2 2
1
cos sen = (3)
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 5
Sostituendo la formula (3) nella (1) si ha:
| | | | 0 0 0
0 | 0
2 2 2 2
cos 1 )
1
1 ( cos 1 ) cos 1 ( cos 1 sen r sen r r x
P
+ =
(
+ = + =
In definitiva lespressione dello spazio percorso dal piede di biella nel tempo t :
( ) ) ( ) ( cos 1 ) (
2 2
t sen t r t x
P
0 0 + = (4)
Nella formula (4), se trascuriamo sen
2
0 rispetto a
2
(perch >1 e sen0<1) si ha la
seguente formula approssimata:
( ) ) ( cos 1 ) ( t r t x
P
0 =
Tale formula la legge del moto armonico, conseguentemente il moto di P non mai
armonico. In teoria il moto sarebbe armonico se tendesse a zero, in pratica ci vale a dire che la
lunghezza della biella dovrebbe essere molto grande rispetto alla manovella (in teoria, P si
muoverebbe di moto armonico solo se la lunghezza della biella fosse infinita e, in tal caso, sarebbe
parallela allasse del moto di P).
Nella formula (4) il tempo non compare esplicitamente ma possiamo farlo comparire
ricordando la seguente relazione che lega langolo di manovella 0 alla velocit angolare :
t t = e 0 ) (
Sostituendo si ottiene:
( ) t sen t r t x
P
e e
2 2
cos 1 ) ( + = (5)
La velocit istantanea di P si ottiene derivando rispetto al tempo x
P
(t):
( ) | | ( ) ( )
|
|
.
|
\
|
+ =
=
(
= + = =
t sen
t t sen
t sen r
t t sen t sen t sen r t sen t r
dt
d
dt
t dx
t v
P
P
e
e e e
e e
e e e e e e e e
2 2
1
2
1
2 2 2 2
cos 2
2
1
cos 2
2
1
cos 1
) (
) (
|
|
.
|
\
|
+ =
t sen
t t sen
t sen r t v
P
e
e e e
e e
2 2
cos 2
2
1
) ( (6)
Nella (6) se raccogliamo a fattor comune, trascuriamo sen
2
t rispetto a
2
e teniamo
conto della identit trigonometrica 2 sent cost=sen2t, si pu ricavare la relazione semplificata
di v
P
(t):
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 6
|
.
|
\
|
+ ~
e
e e
2
2
) (
t sen
t sen r t v
P
(7)
L'accelerazione istantanea di P si ottiene derivando rispetto al tempo v
P
(t) :
|
.
|
\
|
+ +
|
.
|
\
|
+ ~ =
e
e
e
e
e e
2
2 2 cos
cos
) (
) (
2
t sen
t sen
dt
d
r
t
t r
dt
t dv
t a
P
p
che, essendo il moto della manovella circolare uniforme, si semplifica nella seguente relazione:
|
.
|
\
|
+ ~ =
e
e e
t
t r
dt
t dv
t a
P
P
2 cos
cos
) (
) (
2
(8)
Diagrammiamo le equazioni (5), (6) e (8):
Il grafico in fig. 4 mostra che il piede di biella, nella corsa di andata (dal PMS al PMI),
raggiunge il massimo valore della sua velocit un po' prima di aver percorso la semicorsa di andata
mentre, nella corsa di ritorno (dal PMI al PMS), raggiunge il suo valore massimo di velocit un po'
dopo aver percorso la semicorsa di ritorno. La velocit nulla nei punti morti.
Il verso dellaccelerazione importante perch da esso dipende il verso delle forze dinerzia
durante il periodo.
Fig. 4 Andamento dello spazio, velocit e accelerazione del piede di biella.
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 7
Il moto del piede di biella accelerato nelle prime semicorse di andata e ritorno e ritardato
nelle seconde semicorse di andata e ritorno.
L'accelerazione del piede di biella raggiunge i suoi valori massimi nei punti in cui la velocit
si annulla (cio nei punti PMS e PMI) e si annulla nei punti in cui la velocit raggiunge i suoi valori
massimi.
Osserviamo inoltre che l'accelerazione massima nei punti morti perch in tali punti il moto
del piede di biella si inverte (la variazione di velocit massima).
STUDIO DINAMICO
Il manovellismo soggetto nello stesso tempo a forze esterne, forze dinerzia e forze
centrifughe.
Le forze esterne sono dovute alla combustione della sostanza combustibile nel cilindro (nei
motori a c. i.) oppure allazione del vapore (a p=cost) nelle motrici a vapore. Nei motori a
combustione interna la pressione generata dai gas combusti nei cilindri non costante pertanto
indicata con p
la generica pressione interna, la forza istantanea che agisce sul cielo del pistone si
pu calcolare con la seguente relazione generale:
A p F = (N) (9)
in cui A larea del cielo del pistone.
La fig. 5 illustra le forze agenti sul meccanismo durante la semicorsa di andata:
La forza F si pu scomporre nelle componenti F
avente direzione dellasse della biella e F"
avente direzione perpendicolare al moto del pistone:
|
|
Ftg F
F
F = =
" '
cos
(10)
PMI PMS
c
F
F
p
F
F
R
l
|
0
PMI PMS
Fig. 5 Forze istantanee agenti sul piede di biella.
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 8
La forza F
'
sollecita la biella a carico di punta, F" spinge il pistone contro la parete del
cilindro generando una forza dattrito usurante le fasce elastiche.
La forza dinerzia F
i
applicata al piede di biella che nasce in seguito al moto accelerato del
pistone punto P, si pu calcolare con la seguente relazione:
P i
a m F = (11)
in cui m la somma delle masse che si muovono con il pistone cio:
b s f p
m m m m m
3
2
+ + + = (12)
in cui:
m
p
= massa del pistone
m
f
= massa delle fasce elastiche
m
s
= massa dello spinotto
m
b
= massa della biella
La F
i
considerata positiva se favorisce il moto del pistone e viceversa.
Landamento di F e F
i
in due giri dellalbero motore (cio in un ciclo per un motore a 4T)
rappresentato nella seguente fig. 6:
Sommando i valori istantanei di F e F
i
si ottiene la forza totale istantanea che agisce sul
pistone:
Fig. 6 Andamento della forza di pressione dei gas e della
forza dinerzia agenti sul piede di biella.
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 9
i T
F F F
+ = (somma vettoriale) (13)
il diagramma della forza totale rappresentato nella fig. 7:
CALCOLO DEL MOMENTO MOTORE
La biella trasmette al bottone di manovella la forza totale istantanea seguente:
| cos
' T
T
F
F = (14)
Scomposta F'
T
nelle sue componenti radiale F
r
e tangenziale F
t
questultima componente
che genera il momento motore M
m
:
r F M
t m
= (15)
Fig. 7 Andamento della forza totale agente sul piede di biella.
PMI PMS
c=2r
F
T
F
T
p
F
T
F
T
F
r
l
|
0
PMI PMS
F
t
Fig. 8 Forze istantanee agenti sul piede di biella e bottone di manovella.
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 10
Sostituendo a F
t
la sua relazione in funzione di F'
T
e della somma degli angoli | e 0 (vedi
fig. 9) si ottiene la seguente relazione:
( ) ( ) r sen
F
r sen F r F M
T
T t m
+ = + = = | 0
|
| 0
cos
'
(16)
La relazione (16) si pu semplificare in modo da porla in funzione del solo angolo 0; allo
scopo tenendo conto della formula di addizione di due angoli:
( ) | 0 | 0 | 0 sen sen sen cos cos + = +
tenendo conto della relazione (2), dividiamo ambo i membri per cos|:
( )
0
0
0
0
0
|
|
0
|
|
0 0
|
| 0
2 2
2
2 2
1
1
cos
cos
cos
sen
sen
sen
sen
sen
sen
sen
sen
sen
sen
sen
sen
+ =
+ =
+ = + =
+
Pertanto si ottiene:
|
|
.
|
\
|
+ =
u
0 0
0
2 2
cos
sen
sen
sen r F M
T m
che si pu ancora trasformare sapendo che ( ) 0 0 0 cos 2 2 sen sen = (formula di duplicazione di un
angolo):
Fig. 9 Angolo somma di | e 0.
F
T
F
r
F
t
0
|
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 11
|
|
.
|
\
|
+ =
u
0
0
2 2
2
2
sen
sen
sen r F M
T m
(17)
Il diagramma dell'equazione (17) riportato nella fig. 10:
Il grafico dimostra che landamento del momento motore variabile, pertanto per
uniformare il moto rotatorio necessario aumentare il numero di cilindri del motore e usare il
volano.
Fig. 10 Andamento del momento motore (motore a 4T).
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 12
IL VOLANO
Lo studio del meccanismo di biella-manovella ha dimostrato che il momento motore M
m
variabile periodicamente durante il compimento del ciclo operativo (il momento resistente M
r
, al
contrario, si considera costante). La conseguenza di tutto ci la non trascurabile variabilit
durante il ciclo della velocit angolare della manovella, conseguenza della sua bassa inerzia. In
molte applicazioni, tuttavia, richiesto che tale variazione sia contenuta entro limiti precisi affinch
il motore non sia soggetto a forti cambiamenti di velocit. La soluzione che viene adottata di
calettare sull'asse di rotazione della manovella un organo meccanico di massa opportuna (volano)
che conferisca pi regolarit al moto di rotazione. Vediamo come si esprime tutto ci esattamente.
La fig. 11 mostra landamento di M
m
(M
m
= M
r
istante per istante) che si sviluppa in parte
nel piano positivo e in parte nel piano negativo, di conseguenza, essendo le aree delimitate dal
diagramma proporzionali al lavoro, si ha che se il lavoro istantaneo positivo la velocit angolare
aumenta e se negativo la velocit diminuisce.
In termini matematici ci pu essere chiarito dalla seguente relazione tra M
m
e M
r
:
M
m
- M
r
=J (18)
in cui:
- J il momento dinerzia di massa delle masse rotanti rispetto all'asse di rotazione della
manovella (kg m
2
);
- =/t laccelerazione angolare delle masse rotanti (rad/s
2
)
Fig. 11 Lavoro positivo e negativo (motore a 4T).
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 13
La relazione (18) mostra che quando :
- M
m
> M
r
la velocit angolare aumenta fino a raggiungere
2
(velocit angolare massima);
- M
m
< M
r
la velocit angolare diminuisce fino a raggiungere
1
(velocit angolare minima);
- M
m
= M
r
la velocit angolare rimane costante
0
(velocit angolare media).
Il volano, quindi, deve essere capace di assorbire energia quando M
m
> M
r
( >
0
) e
restituirla quando M
m
< M
r
( <
0
).
Allo scopo di determinare la massa del volano, indichiamo con M
m0
il momento motore
medio uguale al lavoro utile L
u
(che a sua volta uguale al lavoro positivo sviluppato delle forze
motrici durante la fase attiva di accensione-espansione meno quello negativo L
r
dovuto alle forze
resistenti manifestantesi durante le fasi passive di aspirazione, compressione e scarico: L
u =
L
m
- L
r
)
diviso la lunghezza della base del diagramma (M
m
, 0):
M
m0
= L
u
/4t (19)
Con riferimento alla fig. 12, il diagramma del lavoro assume la forma di un rettangolo di
base 4t e altezza M
m0
. La stessa area rappresenta il lavoro resistente M
r
considerato costante.
Sempre nella stessa fig. 12 sono stati indicati i punti del ciclo corrispondenti alla situazione
in cui il motore raggiunge la minima e la massima velocit angolare.
Tutto ci premesso, il parametro che caratterizza il funzionamento irregolare del
meccanismo di biella-manovella chiamato grado di irregolarit nel periodo o ed cos definito:
Fig. 12 Momento motore medio (motore a 4T).
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 14
o = (
2
-
1
)/
0
(20)
dove
0
la velocit angolare media:
0
= (
1
+
2
)/2 (21)
Il campo di variazione di o dipende dalla tipologia di macchina e sono i seguenti:
Tipologia di macchina Pompe e ventilatori Motori Alternatori
o richiesto 1/20 1/30 1/100 1/300 1/300
Il volano, quindi, deve avere una massa tale da garantire un prestabilito grado di irregolarit
nel periodo.
La determinazione della massa del volano in pratica preceduta dal calcolo del momento
dinerzia di massa dello stesso nel modo che di seguito illustrato.
Lenergia che determina leccessiva variazione della velocit degli organi rotanti e che il
volano deve assorbire uguale all'eccesso di lavoro motore rispetto al lavoro resistente; questo
lavoro si chiama "lavoro eccedente" e corrisponde in fig. 12 all'area tratteggiata L
e
.
Calcoliamo L
e
nel modo seguente:
) (
2
1
2
1
2
2
e e = J L
e
(22)
tale equazione pu essere riscritta in funzione della (20) e (21):
2
0 0 0 1 2 1 2
2
1
2
2
2
2
1
) )( (
2
1
) (
2
1
e o oe e e e e e e e J J J J L
e
= = + = = (23)
Lequazione (23), infine, permette di ricavare il momento dinerzia di massa del volano:
2
0
oe
e
L
J = (24)
Al fine di ricavare la massa del volano occorre stabilire la sua forma. Tale forma dipende dal
tipo di macchina alla quale destinato (motore endotermico monocilindrico o pluricilindrico,
pompe, ecc.) ma in via di massima si possono ridurre a due forme principali:
a) a disco pieno (v. fig. 13)
b) a corona circolare (v. fig. 14)
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 15
Nel caso del volano a disco il momento dinerzia si calcola con la seguente formula:
2
2
1
mr J = (25)
quindi:
2
0
2
2
1
oe
e
L
mr =
Fig. 13 Volano a disco completo di campana.
Fig. 14 Volano a razze.
r
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 16
da cui si ha:
2 2
0
2
r
L
m
e
oe
= (26)
Nel caso del volano a razze il momento dinerzia si calcola considerando la massa del
mozzo e delle razze trascurabili rispetto a quella della corona:
2 2
2
2
1
) (
2
1
m
mr r r m J = + = (27)
in cui
2
2 1
r r
r
m
+
= il raggio medio, quindi si ha:
2
0
2
oe
e
m
L
r m =
da cui si ricava:
2 2
0 m
e
r
L
m
oe
= (28)
Nelle formule (26) e (28) incognito il lavoro eccedente L
e
che si pu calcolare in funzione
della potenza e del numero di giri del motore n
0
mediante la seguente procedura.
Anzitutto si introduce un nuovo coefficiente
1
detto "coefficiente di fluttuazione" cos
definito:
1
1
L
L
e
= (29)
in cui L
1
il lavoro compiuto nel periodo dal motore (vale a dire in un giro dellalbero motore).
La seguente tabella ne riporta alcuni valori:
Tipologia
di motore
Otto 2T Otto 4T
Diesel 2T Diesel 4T
N cilindri 1C 2C 3C 4C 1C 2C 3C 4C 6C 8C
1
10
-2
80100 1525 80100 45 140200 5070 2535 1220 69 35
125135 5565 2228 1012 320360 130180 8090 2030 1015 911
Calcoliamo L
1
in funzione di M
m0
e della potenza N da erogare alla velocit angolare media
0
:
0 0 0 0
2 n M M N
m m
t e = = (30)
il lavoro compiuto in un giro uguale al seguente prodotto:
t 2
0 1
=
m
M L (31)
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 17
ricavando M
m0
dalla (30) e sostituendo nella (31) si ha:
0 0
1
2
2 n
N
n
N
L = = t
t
(32)
sostituendo la 32 nella (29) si ricava L
e
:
0
1 1 1
n
N
L L
e
= = (33)
La massa del volano si ricava dopo aver sostituito la (33) nella (26) e (28) e aver sostituito
0 0
2 n t e = :
3
0
2 2
1
4
2
n r
N
m
t o
= (34) (massa volano a disco)
3
0
2 2
1
4 n r
N
m
m
t o
= (35) (massa del volano a razze)
Nota la massa del volano, il volume V pu essere ricavato mediante la massa specifica del
materiale col quale esso sar costruito, con la seguente formula:
m
V = (36)
Ricavato il volume, rimane da definirne la geometria attraverso le seguenti formule:
b r V
2
t = (37) (volano a disco)
b r r V ) (
2
2
2
1
= t (38) (volano a razze)
nelle quali b rispettivamente la lunghezza assiale del disco o della corona.
ESERCIZIO N. 1
Tema desame di Stato di Meccanica Applicata - Sessione Ordinaria 2004
Una pompa a stantuffo a semplice effetto ha le seguenti caratteristiche:
- velocit di rotazione: 120 giri/min;
- diametro del cilindro: 200 mm;
- corsa del pistone: 320 mm;
- prevalenza monometrica: 280 J/kg;
- fluido movimentato: fanghi con massa volumica 1600 kg/m
3
Il candidato:
1) disegni con opportuna scala il diagramma del momento richiesto in funzione dellangolo di
manovella.
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 18
2) esegua uno schizzo quotato della manovella di estremit del meccanismo assumendo con
proprio criterio tutte le dimensioni occorrenti.
Indichi, in riferimento alle varie posizioni della manovella, le maggiori sollecitazioni
presenti nelle sezioni trasversali della stessa ed effettui verifiche di resistenza di quelle che
ritiene pi pericolose dopo aver specificato il material da usare.
3) (facoltativo) con laiuto del diagramma del momento richiesto, in via approssimativa, valuti
il momento di inerzia di un volano che garantisca un grado di irregolarit nel periodo non
superiore al 4%.
In alternativa al punto 3)
3) calcoli, in riferimento alle posizioni critiche della manovella (quadratura e allineamento con la
biella), le sollecitazioni presenti nelle sezioni trasversali pi pericolose.
SOLUZIONE
Nella figura stato rappresentato il sistema meccanico complessivo:
Vediamone il principio di funzionamento. Lo stantuffo, spostandosi verso destra dal PMS al
PMI crea una depressione allinterno del cilindro che mantiene aperta la valvola di aspirazione (A)
e chiusa quella di mandata (M) permettendo, al contempo, al liquido di entrare nel cilindro
(naturalmente la tubazione di aspirazione piena di liquido grazie ad una valvola di non ritorno -
non rappresentata nella figura- che ne impedisce lo svuotamento durante la fase di mandata).
Lo stantuffo, raggiunto il PMI, inverte il suo moto e preme sulla massa liquida aspirata
provocando limmediata chiusura della valvola di aspirazione e, dopo che la pressione nel cilindro
ha superato quella esistente a valle della valvola di mandata, lapertura della stessa valvola.
Nella corsa di ritorno verso il PMS, lo stantuffo spinge la massa liquida nel condotto di
mandata. Il ciclo ricomincia quando, allinversione del moto al PMS, si riduce la pressione
provocando la chiusura della valvola di mandata e la riapertura di quella di aspirazione.
PMS
PMI
Fig. 15 Pompa a stantuffo a semplice effetto.
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 19
1) Il momento motore si pu calcolare con la seguente nota relazione:
e
a
m
N
M =
dove N
a
la potenza assorbita dalla pompa e la velocit angolare della manovella.
La potenza N
a
assorbita dalla pompa a stantuffo a semplice effetto si calcola con la formula
seguente:
p
a
H Q
N
q
=
in cui: = 1600 kg/m
3
(massa volumica dei fanghi)
Q = portata media teorica [m
3
/s]
H = 280 prevalenza manometrica [J/kg]
p
=
m
v
(rendimento totale della pompa)
La portata media teorica Q, a sua volta, data dalla cilindrata unitaria V
c
per il numero di
giri n della manovella:
3
2 2
01 , 0 32 , 0
4
2 , 0
4
m c
D
V
c
=
=
t t
in cui: D = 200 mm = 0,2 m (diametro del cilindro o alesaggio)
c = 320 mm = 0,32 m (corsa del pistone)
quindi risulta:
s m n V Q
c
/ 02 , 0 2 01 , 0
3
= = =
dove: n = 120 giri/min = 2 giri/s (velocit di rotazione della manovella)
Pertanto sapendo che:
m
= 0,880,97 (rendimento meccanico);
y =
0,870,97 (rendimento
idraulico) e
v
= 0,950,99 (rendimento volumetrico) la potenza risulta:
W
H Q H Q
N
v y m p
a
9924
99 , 0 95 , 0 96 , 0
280 02 , 0 1600
=
=
=
=
q q q
Il momento motore M
m
:
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 20
Nm
n
N N
M
a a
m
790
2 2
9924
2
= = = =
t t e
Prima di disegnare il diagramma del momento motore in funzione di 0, si deve calcolare la
pressione di mandata che, trascurando le perdite, si pu ritenere costante durante la corsa del
pistone dal PMI al PMS.
La pressione di mandata costante agente sul pistone si pu calcolare sapendo che il lavoro
compiuto dalla forza di pressione uguale al lavoro compiuto dal momento motore medio in un
giro:
m
M c A p t 2 =
Pa
r
D
M
r
D
M
Ac
M
p
m m m
493750
16 , 0
4
2 , 0
790
4
2
4
2 2
2 2 2
=
=
t
t t
dove: m
c
r 16 , 0
2
32 , 0
2
= = = (raggio di manovella)
2
2 2
0314 , 0
4
2 , 0
4
m
D
A =
=
t t
(area del pistone)
N A p F
T
15504 0314 , 0 493750 = = =
(forza agente sul pistone)
Il momento effettivo agente sulla manovella in funzione dellangolo 0 espresso dalla
relazione (17):
|
|
.
|
\
|
+ =
u
0
0
2 2
2
2
sen
sen
sen r F M
T m
(17)
in cui F
T
costante (perch la p costante durante la corsa di mandata), la biella si assume di
lunghezza doppia della manovella (l=2r =l/r=2); pertanto, trascurando le inerzie dovute al moto
alterno del sistema biella/manovella, il momento istantaneo alternativo M
a
(durante la mandata (0
<0 <180) si potr calcolare con la relazione approssimata della (17):
|
.
|
\
|
+ ~ =
0
0
2
2 sen
sen r F M M
T m a
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 21
mentre, durante la corsa di ritorno (180<0 <360) il momento alternativo sar nullo:
0 =
a
M
Il valore massimo di M
a
si ha in quadratura (quando biella e manovella formano un angolo
retto, v. figura seguente):
in tal caso si ottiene:
~ = = = 27 5 , 0
1
|
|
l
r
tg
= = = 63 27 90 90 | 0
Nm
sen
sen
sen
sen r F M
T a
2074 09 , 1 16 , 0 15504
2 2
126
63 16 , 0 15504
2
2
max
= = |
.
|
\
|
+ = |
.
|
\
|
+ =
0
0
Landamento approssimato del momento M
a
allalbero in funzione dellangolo di manovella
presentato in fig. 17:
0 t 2t
2074 N m
790 N m M
m
M
a max
200
t/2
c = 2r
l
r
90
|
0
PMI PMS
Fig. 16 Meccanismo di biella e manovella.
Fig. 17 Diagramma del momento motore istantaneo.
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 22
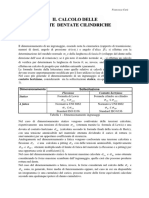
2) Il dimensionamento della manovella inizia col calcolo del diametro d del bottone di manovella
(al PMS, v. fig. 18) e del diametro D del piede di manovella che dipende dalle dimensioni
dellalbero motore soggetto al momento M
m
.
Il bottone di manovella si dimensiona assumendo una pressione specifica per il cuscinetto pari
p
amm
= 9 N/mm
2
e un rapporto l/d = 1,1:
mm
p
F
d
amm
T
57 , 39
9 1 , 1
15504
1 , 1
=
= =
che arrotonderemo a 40 mm. Il diametro dellalbero motore, posto a=3,5d
= 3,5 40 = 140 mm (v.
fig. in alto), si dimensiona a flessotorsione secondo il criterio di Von Mises:
2 2
4
3
t f fid
M M M + =
in cui: Nm M M
m t
790 = =
Nm Nmm a F M
T f
2171 2170560 140 15504 ~ = = =
si ricava:
Nm M
fid
2276 790
4
3
2171
2 2
= + =
F
T
a
l
1
L
R
R
1
d
1
d
D
'
e
2
e
1
D
D
1
A A
B B
Fig. 18 Manovella destremit al PMS.
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 23
Per la costruzione dellalbero si sceglie l'acciaio S 355 JR EN 10027-1 (corrispondente
allacciaio Fe 510 B UNI 7070) avente una
amm
= 60 N/mm
2
. Quindi il diametro D risulta:
mm
M
D
amm
fid
73
60
2276000 32
32
3
3
=
= =
t to
Per tener conto dellindebolimento derivante dalla chiavetta assumiamo D=75 mm. Adesso
si dimensiona la manovella di estremit (costruita utilizzando l'acciaio S 355 JR) con le formule
sperimentali riportate in fig. 19 (dal manuale Hoepli):
R = 160 mm (raggio di manovella)
d = 40 mm (diametro del perno di manovella)
D =75 mm (diametro dellalbero)
D' =0,9D=67,5 mm
D
1
= 1,9D =142,5 mm
R
1
= R - D
1
/2= 17,5 mm
d
1
= 2,5 d = 100 mm
l
1
= 1,5 d = 60 mm
l = 1,1 d = 44 mm (lunghezza del perno di manovella)
Sez. B-B
b
2
h
2
Sez. A-A
b
1
h
1
Fig. 19 Caratteristiche geometriche della manovella destremit.
Fig. 20 Sezioni resistenti del
braccio di manovella.
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 24
h
1
= 0,7 d = 28 mm
b
1
= 1,6 d = 64 mm
h
2
= 0,7 D = 52,5 mm
b
2
= 1,6 D = 120 mm
a = 3,5 d = 140 mm
e
1
= l/2 + h
1
/2 = 36 mm
e
2
= l/2 + h
2
/2 = 48,25 mm
L = 1,2D = 90 mm
3) Calcoliamo il momento dinerzia del volano che si ricava mediante la formula (24):
2
0
oe
e
L
J =
Il lavoro eccedente L
e
si calcola dal diagramma del momento alternativo (v. fig. 21):
Infatti, L
e
uguale alla somma delle aree delle figure ABC, DEF e EFGH. Le prime due
figure possono essere assimilate a due triangoli rettangoli di cateti AC=M
m
; AB=t/12; EF=M
m
;
DE=t/6; la terza figura un rettangolo di base FH=t e altezza EF=M
m
. Pertanto il lavoro eccedente
risulta:
J
M
M
M M
L
m
m
m m
e
2792
8
790 9
8
9
2
6
2
12
~
=
= + + =
t t
t
t t
Il momento dinerzia del volano risulta:
0 t 2t
2074 N m
790 N m
M
m
M
a max
200
A B D E G
C F H
C F H
Fig. 21 - Calcolo del momento eccedente.
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 25
2
2 2
0
442
60
120 2
04 , 0
2792
kgm
L
J
e
=
|
.
|
\
|
= =
t
oe
3) Durante il ciclo di lavoro, le maggiori sollecitazioni si verificano nelle sezioni trasversali A-A e
B-B (v. fig. 20) della manovella in corrispondenza delle posizioni di quadratura e di
allineamento con la biella.
Manovella in allineamento con la biella (PMS).
In questa posizione si verifica la resistenza della sez. A-A (tangente al bottone di manovella)
di misure:
h
1
= 28 mm
b
1
= 64 mm
Le sollecitazioni sono:
F
T
= 15504 N (sforzo assiale)
Nmm e F M
T f
589152 38 15504
1
= = = (momento flettente)
Calcoliamo le tensioni massime.
La tensione di compressione vale:
2
1 1
/ 65 , 8
64 28
15504
mm N
b h
F
A
F
T T
c
=
= = o
Il modulo di resistenza a flessione :
3 2 2
1 1
8363 28 64
6
1
6
1
mm h b W
f
= = =
F
T
a
l
1
L
R
R
1
d
1
d
D
'
e
2
e
1
D
D
1
A A
B B
Fig. 22 - Manovella destremit al PMS.
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 26
La tensione di flessione :
2
max
/ 44 , 70
8363
589152
mm N
W
M
f
f
f
= = = o
La tensione di flessione superiore al carico di sicurezza, pertanto dobbiamo modificare
le misure delle sezioni A-A e B-B. Per questo disegniamo in scala la manovella e ricaviamo
direttamente dal disegno b
1
(vedi fig. 23):
h
1
= 28 mm
b
1
= 120 mm (ricavata dal disegno della manovella)
Calcoliamo le nuove tensioni massime.
La tensione di compressione vale:
2
1 1
/ 6 , 4
120 28
15504
mm N
b h
F
A
F
T T
c
=
= = o
3 2 2
1 1
15680 28 120
6
1
6
1
mm h b W
f
= = =
La tensione di flessione :
2
max
/ 6 , 37
15680
589152
mm N
W
M
f
f
f
= = = o
Fig. 23 - Nuovo profilo del braccio di manovella.
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 27
La tensione totale risulta:
2
/ 2 , 42 6 , 37 6 , 4 mm N
f c
= + = + = o o o
inferiore al carico di sicurezza del materiale
amm
= 60 N/mm
2
.
Manovella e biella in quadratura.
In questa posizione si verifica la resistenza della sez. B-B (tangente al mozzo dellalbero).
Ricaviamo anche in questo caso dal disegno la misura b
2
(v. fig. 23):
h
2
= 52,5 mm
b
2
= 130 mm (ricavata dal disegno della manovella)
Le sollecitazioni, trascurando quella di taglio, sono:
Nmm
sen
e
sen
F
e F M
T
t
1716062 25 , 50
27
15504
'
2 2
=
= = =
|
Nmm
sen
R
sen
F
R F M
T
f
597634 5 , 17
27
15504
'
1 1
=
= = =
|
Verifichiamo la sezione impiegando la tensione ammissibile
amm
= 60 N/mm
2
prima
definita (acciaio S 355 J R).
Il modulo di resistenza a flessione e a torsione sono:
D
D
1
A A
B B
Fig. 24 - Manovella destremit in quadratura.
F'
a
l
1
L
R
R
1
d
1
d
D
'
e
2
e
1
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 28
3
2 2
2 2
2
2 2
91875
9 , 3
5 , 52 130
8 , 3
mm
h b
k
h b
W
t
=
=
3 2 2
2 2
147875 130 5 , 52
6
1
6
1
mm b h W
f
= = =
in cui k si ricava dalla seguente tabella:
b/h 1 1,2 1,4 1,5 1,6 1,8 2 2,5 3 4 5 6 8
k 4,80 4,57 4,40 4,33 4,27 4,16 4,07 3,88 3,74 3,55 3,43 3,35 3,26 3
Le tensioni massime sono:
2
max
/ 19
91875
1716062
mm N
W
M
t
t
t
~ = = t
2
max
/ 4
147875
597634
mm N
W
M
f
f
f
~ = = o
La corrispondente tensione ideale :
2 2 2 2 2
/ 33 19 3 4 3 mm N
id
~ + = + = t o o
inferiore al carico di sicurezza del materiale
amm
= 60 N/mm
2
.
ESERCIZIO N. 2
Tema desame di Stato di Meccanica Applicata - Sessione Ordinaria 2002
Per regolare il regime di rotazione di un gruppo elettrogeno, viene calettato sull'albero di
trasmissione del motore un volano in ghisa.
Si hanno i seguenti dati:
- coppie polari dell'alternatore p = 2
- frequenza della corrente elettrica di rete f = 50 Hz
- potenza all'asse del motore (diesel 4 cilindri, 4 tempi ) N = 30 kW
Il candidato, dopo avere assunto con motivato criterio i dati ritenuti necessari, effettui:
- il dimensionamento di massima del volano;
- la verifica della corona alla forza centrifuga;
- lo schizzo quotato dell'organo meccanico.
Il candidato, inoltre, illustri sinteticamente le caratteristiche costruttive e di funzionamento
dell'organo meccanico.
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 29
SOLUZIONE
Caratteristiche costruttive e di funzionamento del volano
Nelle macchine motrici con meccanismo a biella-manovella l'albero motore riceve energia
dallo stantuffo durante la corsa di espansione (fase attiva) restituendola allo stesso e ad altri organi
nelle altre corse per mantenerli in moto, superando i punti morti.
Tutto ci causa laccelerazione dell'albero motore nella fase attiva e la decelerazione nelle
altre, per cui durante ogni ciclo o periodo (formato da quattro o due corse), la velocit angolare
dell'albero varia da un minimo (
1
, marcia a pieno carico) a un massimo (
2
, marcia a vuoto),
seguendo le variazioni periodiche delle forse motrici e resistenti.
Durante ciascun ciclo si producono cio alternativamente degli eccessi di lavoro motore e di
lavoro resistente ai quali corrispondono delle accelerazioni e decelerazioni del movimento; durante
le prime, l'eccesso di lavoro motore viene immagazzinato sotto forma di energia cinetica, la quale
viene restituita durante la seconda per compensare l'eccesso di lavoro resistente. Lo scarto di
velocit (
2
-
1
,) sar tanto minore quanto pi grande sar l'attitudine degli organi rotanti a
immagazzinare energia cinetica, cio quanto pi grande sar il momento d'inerzia degli organi stessi
rispetto all'asse di rotazione. Per aumentare tale momento d'inerzia, viene calettato sull'albero
motore un organo detto volano che pu essere a disco o a razze.
Il volano a disco caratteristico delle macchine rotanti ad alta velocit, come ad esempio i
motori endotermici per autotrazione; di piccole dimensioni ed generalmente realizzato in
acciaio. Il volano a razze si impiega invece nelle macchine rotanti a medie e basse velocit; di
grandi dimensioni ed realizzato in ghisa.
Progettazione del volano
Data la potenza N (kW), il grado dirregolarit , il coefficiente di fluttuazione
1
, il raggio
medio r
m
(m) del volano e la velocit media n
0
(giri al minuto), la massa data da:
3
0
2 2
1
4 n r
N
m
m
t o
=
Il raggio medio si pu preventivamente determinare in base alla massima velocit periferica
ammissibile durante lesercizio del volano per limitare la sollecitazione prodotta dalla forza
centrifuga che dipende dal materiale impiegato per la costruzione del volano.
Per il motore in esame (diesel 4T, 4C) si assume un coefficiente di fluttuazione
1
= 0,25.
La conoscenza del coefficiente di fluttuazione
1
permette di ricavare in modo semplice la
massa m del volano necessaria per ottenere un grado di irregolarit imposto.
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 30
Il grado dirregolarit richiesto per alternatori di = 0,003.
Per corone di ghisa la velocit periferica consigliata di v 30 40 m/s.
Il numero di giri al minuto n
0
del motore dipende dal numero di coppie polari
dellalternatore p = 2 e dalla frequenza di rete f = 50 Hz:
min / 1500
2
50 60 60
0
giri
p
f
n =
= =
Fissata la velocit periferica ammissibile v = 30 m/s, il raggio r
m
:
m
n
v
r
m
19 , 0
60
1500
2
30
2
0
=
|
.
|
\
|
= =
t
t
pertanto, la massa del volano risulta:
kg
n r
N
m
m
112
60
1500
19 , 0 4
30000
003 , 0
25 , 0
4
3
2 2
3
0
2 2
1
=
|
.
|
\
|
= =
t
t o
Il volume del volano, considerando la massa volumica della ghisa = 7,25 kg/dm
3
, si ricava
applicando la formula (36):
3
448 , 15
25 , 7
112
dm
m
V = = =
Il volume del volano anche definito dalla formula (38):
b r r V ) (
2
2
2
1
= t
che pu essere opportunamente modificata per facilitarne luso nelle applicazioni, introducendo il
raggio medio e lo spessore h=r
1
-r
2
:
b h r b r r r r b r r V
m
= + = = 2 ) )( ( ) (
2 1 2 1
2
2
2
1
t t t (formula di Guldino)
Assumendo il rapporto b=2h (in genere tale rapporto b/h=23) si ha che:
2
4 h r V
m
t =
da cui:
dm
r
V
h
m
8 , 0
9 , 1 4
448 , 15
4
= = =
t t
di conseguenza:
b = 2h = 1,6 dm;
h
b
r
2
r
1
Fig. 25 Sezione del volano a razze.
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 31
r
1
=r
m
+ h/2= 2,3 dm;
r
2
=r
m
- h/2= 1,5 dm
Il numero di razze definito da: 4 2
8
1
7
1
1
>
|
.
|
\
|
= r i . Con i dati a noi noti ed esprimendo r
1
in mm si ottiene: 68 , 2 230 2
8
1
=
|
.
|
\
|
= i pertanto per sicurezza si assume i = 6.
Nei calcoli svolti sono stati trascurati e linerzia dovuta alle altre masse in movimento e la
massa delle razze (che costituiscono circa il 10% della massa del volano) ma ci, anche se rende i
calcoli un po' meno precisi, va a vantaggio della regolarit di funzionamento.
Verifica della corona alla forza centrifuga.
Ai fini della verifica in parola, il volano si pu immaginare come se fosse un anello che la
forza centrifuga tende di dividere a met.
Questa forza centrifuga si calcola con la seguente formula:
2
2
0 G
c
y m
F
e
=
in cui:
t
m
G
r
y
2
= la distanza del baricentro G
1
della
semicirconferenza media della corona dal centro O.
Con i dati noti si ha:
y
G
= 1,21 dm.
La forza centrifuga vale:
N
y m
F
G
c
167022
2
121 , 0
60
1500 2
112
2
2
2
0
=
|
.
|
\
|
= =
t
e
La sezione resistente della corona :
A= 2bh
La sollecitazione a trazione risulta:
2
/ 52 , 6
80 160 2
167022
mm N
A
F
c
t
=
= = o
O
F
c
F
c
y
G
G
1
G
2
Fig. 26 Corona del volano a razze.
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 32
che minore di quella ammissibile della ghisa
am
= 12 N/mm
2
.
Un altro effetto cui la forza centrifuga d luogo la flessione che si genera nel tratto di
corona di lunghezza l tra due razze consecutive. Tale tratto si comporta come una trave incastrata
agli estremi e sollecitata da un carico uniformemente distribuito.
Il momento d'incastro pari a:
12
2
l q
M
f
=
in cui q il carico uniformemente distribuito indotto dalla forza centrifuga relativo al tratto di
corona di lunghezza l:
mm
i
r
l
m
199
6
190 2 2
= = =
t t
Risulta:
mm N
l i
F
l
i
F
q
c
c
/ 280
199 6
167022 2 2
2
=
= =
Nmm
l q
M
f
023 . 924
12
199 280
12
2 2
=
=
Il modulo di resistenza a flessione:
W
f
= bh
2
/6 = 170.667 mm
3
quindi la tensione a flessione risulta:
f
= M
f
/ W
f
= 5,41 N/mm
2
.
La sollecitazione totale :
=
f
+
t
= 11,93 < 12 N/mm
2
La corona verificata alla forza centrifuga.
Schizzo quotato dell'organo meccanico:
Fig. 27 Schizzo quotato del volano.
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 33
REGOLATORI
Il funzionamento delle macchine motrici a un certo regime di giri costante richiede
lequilibrio tra momento motore e momento resistente. Il verificarsi di uno squilibrio di una certa
durata fra i due momenti pu provocare una variazione pi o meno sensibile del numero di giri
allunit di tempo compiuti dalla macchina motrice. Allora, necessario che ad ogni variazione del
momento resistente il momento motore possa variare nello stesso senso. I regolatori meccanici
sono meccanismi che permettono di mantenere lequilibrio fra momento motore e momento
resistente. I regolatori meccanici pi usati ancora oggi sono i centrifughi nei quali si utilizza la forza
centrifuga, agente su opportune masse del regolatore, per spostare lorgano che regola la quantit di
fluido che alimenta la macchina motrice. Un esempio di questo regolatore illustrato in fig. 28.
Il regolatore faceva accelerare la macchina motrice se rallentava per il troppo carico o la
faceva rallentare dopo un'accelerazione dovuta a diminuzione di carico.
Non tutte le macchine motrici per hanno bisogno di un intervento esterno per riprendere il
moto uniforme. Alcune motrici infatti presentano la seguente curva di coppia (curva
caratteristica):
Fig. 29 Curva caratteristica di coppia discendente.
n
n
max
M
m
n
min
Fig. 28 - Regolatore centrifugo a sfere.
Funzionamento: quando la
velocit angolare del
regolatore aumenta, le
sfere si alzano per effetto
della forza centrifuga e
spostano verso il basso il
collare che mediante la
leva chiude la valvola a
farfalla che regola il fluido
che alimenta la macchina.
Cinghia trapezoidale
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 34
Il funzionamento della motrice (che in questo esempio si suppone funzionante al massimo
carico) stabile perch se il momento resistente M
r
diminuisse, il numero di giri della macchina n
aumenterebbe e il M
m
diminuirebbe fino a raggiungere un nuovo punto di stabilit.
Una macchina motrice con curva di coppia ascendente non stabile:
Infatti, se il momento resistente diminuisse, aumenterebbero e il numero di giri e il momento
motore, conseguentemente lo squilibrio aumenterebbe sempre di pi. In tal caso necessaria la
regolazione della macchina. Il regolatore serve per riportare il funzionamento della macchina tra n
1
e n
2
.
Indichiamo con n il numero di giri a regime della macchina calcolabile con buona
approssimazione con la seguente relazione:
2 2
min max 2 1
n n n n
n
+
=
+
= (39)
i parametri caratteristici di un regolatore sono il grado d'insensibilit i e il grado di irregolarit s
(o di staticit) che sono definiti come di seguito riportato:
Fig. 30 Curva caratteristica di coppia discendente.
Fig. 31 Curva caratteristica di coppia ascendente.
M
r1
n
n
max
M
m
n
min
M
r2
n
1
n
2
Curva caratteristica
del momento resistente
n
n
max
M
m
n
min
n
2
n
1
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 35
n
n n
i
1 2
= (40) con i = 0,0120,013
n
n n
s
min max
= (41) con s = 0,020,08
Il regolatore si dice "statico" se s > 0, si dice "astatico" se s = 0 e la regolazione
impossibile.
Il regolatore efficace se i < s.
Il grado di irregolarit serve per la scelta del regolatore pi adatto alla macchina.
REGOLATORE ELEMENTARE DI WATT (regolatore centrifugo a sfere).
La fig. 32 illustra il regolatore di Watt, ormai in disuso, con tutte le grandezze fisiche che
permettono di descriverne il funzionamento. Lobiettivo determinare le relazioni che legano il
grado di insensibilit e il grado di irregolarit alle grandezze del sistema.
I simboli in fig. 22 hanno il seguente significato:
m = massa [kg]
h = altezza di regolazione [m]
r = distanza delle masse dallasse di rotazione [m]
= velocit angolare [rad/s]
n= numero di giri nellunit di tempo [giri/s]
P = peso delle sfere [N]
Fig. 32 Regolatore di Watt.
F
c
F
c
P
P
m m
F
c
O
Massa attiva
Braccio
Albero
Collare
Biella
h
r
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 36
F
c
= forza centrifuga [N]
Scriviamo lequazione di equilibrio intorno ad O (detta equazione caratteristica del
regolatore):
r P h F
c
= (42)
Sostituendo le espressioni di F
c
= m
2
r e P = mg si ricava:
mgr rh m =
2
e
da cui, ricordando che =2tn e che
( )
1
2
~
t
g
, si ricava:
( )
2 2 2
4
1
2 n n
g g
h ~ = =
t e
(43)
La formula (43) dice che il regolatore di Watt non adatto per alti numeri di giri perch per
n molto grande h risulta molto piccolo e ci significa che le aste raggiungono presto la posizione
quasi orizzontale rendendo impossibile la regolazione in caso di ulteriore incremento di velocit.
Si passa allora al regolatore PORTER.
REGOLATORE PORTER
Questo regolatore deriva da quello di Watt al quale stato aggiunto un collare contrappesato
di peso totale Q che ha leffetto di aumentare P di Q (v. fig. 33):
Fig. 33 Regolatore Porter.
Il carico Q stato scomposto lungo le
bielle (componenti Q' ). Una di tali
componenti viene traslata in B e qui
di nuovo scomposta nelle sue
componenti verticale e parallela al
braccio. La componente verticale
uguale ancora a Q. Pertanto il peso
del collare si pu considerare
applicato alla cerniera di
collegamento braccio-biella.
O
Collare con contrappeso Q
h
m
m
F
c
F
c
P P
r
r
1
Q
Q
l
a
Q
Q
Q' Q'
Q
Q'
O
A
B
B'
A'
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 37
Eseguiamo nuovamente lequilibrio rispetto al punto O:
r P r Q h F
c
+ =
1
(44)
r
F
P
r
F
Q
h
c c
+ =
1
Sostituendo le espressioni di F
c
= m
2
r e P = mg e tenendo conto della (39) si ricava:
|
.
|
\
|
+ ~ |
.
|
\
|
+ =
|
|
.
|
\
|
+ =
|
.
|
\
|
+ = 1
4
1
1 1
1
2
1
2
1
2 2
1
2
r
r
P
Q
n r
r
P
Q g
r
mgr
Q g
r m
mg
r
r m
Q
h
e e e e
(45)
La relazione (45) mostra che laltezza h pu essere incrementata di quanto si vuole
solamente incrementando Q.
La relazione (45) pu essere riscritta in modo da far comparire la distanza del braccio l e la
distanza tra la cerniera dellalbero e quella di collegamento braccio-biella a (v. fig. 23):
|
.
|
\
|
+ ~ 1
4
1
2
l
a
P
Q
n
h (46)
Nel caso in cui si volesse tener conto delle resistenze al moto del collare (resistenze dattrito
nelle articolazioni, inerziali degli organi in movimento, ecc.) che si manifestano quando la
macchina si squilibra, indichiamo tali resistenze con F
a
e, tenendo presente che la sua azione
sempre contraria allo spostamento del collare, si ricava:
|
.
|
\
|
+
~ 1
4
1
2
l
a
P
F Q
n
h
a
(47)
in cui la forza antagonista F
a
va presa con il segno "+" se il collare sale e viceversa.
La relazione (46) o (47) mostra che laltezza h pu essere incrementata quanto si vuole
incrementando Q.
Nelle formule precedenti ponendo l=a la configurazione del regolatore cambia divenendo
quella di un quadrilatero articolato formato da quattro aste della stessa lunghezza con le sfere poste
ai vertici detto regolatore Porter (v. fig. 34), in tal caso le formule si semplificano (perch ai fini del
funzionamento, Q, P e F
a
possono essere considerate applicate tutte nel baricentro delle sfere) e il
numero di giri del regolatore nel funzionamento a regime (cio a numero di giri costante n) risulta:
|
.
|
\
|
+ ~ 1
4
1
P
Q
h
n (48)
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 38
mentre i numeri di giri che limitano il normale campo di funzionamento del regolatore sono:
|
.
|
\
|
+
~ 1
4
1
1
P
F Q
h
n
a
(49)
|
.
|
\
|
+
+
~ 1
4
1
2
P
F Q
h
n
a
(50)
e quindi il grado di insensibilit:
P Q
F
n
n n
n n
n n
n
n n
n
n n
i
a
+
=
=
+
+
=
2
2
1
2
2
1 2
1 2 1 2 1 2
2
(51)
Il grado di irregolarit lo si pu calcolare note le altezze massima (h
max
) e minima (h
min
) che
il regolatore pu raggiungere compatibilmente con la sua geometria:
|
.
|
\
| +
~
P
P Q
h
n
min
max
4
1
(52)
|
.
|
\
| +
~
P
P Q
h
n
max
min
4
1
(53)
n
n n
s
min max
= (54)
Naturalmente deve risultare i < s se si vuole che il regolatore sia efficace.
Nel regolatore Porter a bracci uguali, lo spostamento del collare risulta il doppio di quello
fatto dalle sfere.
Fig. 34 Regolatore Porter a bracci uguali.
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 39
REGOLATORE HARTUNG (regolatore centrifugo a molla)
Il regolatore Porter esaminato in precedenza, diventa ingombrante e pesante quando le
macchine motrici sono veloci. In questi casi lazione delle forze antagoniste (costituite da forze
peso) viene sostituita dalla reazione elastica di una molla.
Un regolatore che soddisfa tale caratteristica il regolatore Hartung.
Un regolatore siffatto costituito da due masse cilindriche rotanti, chiuse in un carter, che
scorrono orizzontalmente al variare della forza centrifuga. Tali masse agendo su due leve a squadra
azionano il collare che si sposter proporzionalmente al variare della velocit di rotazione. Lo
spostamento delle masse contrastato da altrettante molle (v. fig. 35):
Le forze applicate alle leve del regolatore sono rappresentate in fig. 36:
I simboli nelle figg. 35 e 36 hanno il seguente significato:
m = massa (kg)
k = costante elastica della molla (N/m)
Fig. 35 Regolatore Hartung.
Fig. 36 Forze agenti sulla leva del regolatore Hartung.
O
F
m
F
a
/2
b
b
F
c
O
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 40
b = bracci della leva angolare (m)
= velocit angolare (rad/s)
F
m
= reazione elastica della molla (N)
F
c
= forza centrifuga (N)
F
a
= forza resistente complessiva (N)
Scriviamo lequazione di equilibrio dinamico a regime normale (F
a
= 0) della leva rispetto al
punto O :
b F b F
m c
= (55)
quindi
m c
F F =
Sostituendo le espressioni di F
c
= m
2
r e P = mg si ricava:
m
F r m =
2
e
da cui, ricordando che =2tn e che
( )
1
2
~
t
g
, si ricava:
r P
F
n
m
~
4
2
(56)
Nelle fasi di squilibrio la forza resistente si manifesta e si ha:
b
F
b F b F
a
m c
=
2
(57)
Sostituendo come fatto prima le espressioni di F
c
= m
2
r e P = mg e ricordando che
=2tn e che
( )
1
2
~
t
g
, si ricava:
r P
F F
n
a m
~
4
2 /
2
(58)
In analogia a quanto fatto per il regolatore Porter avremo:
r P
F
n
m
~
4
2
(59)
2
2
2
4
2 /
r P
F F
n
a m
+
~ (60)
1
2
1
4
2 /
r P
F F
n
a m
~ (61)
nelle quali r
1
e r
2
sono le distanze del baricentro dei contrappesi dallasse di rotazione.
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 41
Se invece considerassimo la massima e minima escursione possibile si avrebbe:
max
2
max
4 r P
F
n
m
~ (62)
min
2
min
4 r P
F
n
m
~ (63)
nelle quali r
min
e r
max
sono la minima e massima distanza del baricentro dei contrappesi dallasse di
rotazione e si ricavano osservando il seguente schema:
2
min
c
b r =
2
max
c
b r + =
infine, il grado di insensibilit dato dalla seguente formula:
m
a
F
F
n
n n
n
n n
i
2 2
2
2
1
2
2 1 2
=
= (64)
e il grado di irregolarit si ottiene dalla relazione gi vista per il regolatore Porter:
n
n n
s
min max
= (65)
b + c/2
b
c
c
/
2
c
/
2
Fig. 37 Corsa del collare e spostamenti massime delle molle
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 42
ESERCIZIO N. 3
Tema desame di Stato di Meccanica Applicata - Sessione Ordinaria 1967
Un regolatore di Hartung ha le seguenti caratteristiche:
numero di giri di regime (n) 200 giri/min
grado di irregolarit (s) 3:100
grado dinsensibilit (i) 1:1000
forza resistente agente sul collare (F
a
) 0,5 kg
f
lunghezze dei bracci (uguali) della leve a squadra (b) 150 mm
corsa del collare (c) 100 mm
Determinare:
1) la forza esercitata da ciascuna molla al numero di giri di regime (F
m
);
2) il peso di ciascun contrappeso (P);
3) il valore della forza centrifuga in corrispondenza delle posizioni estreme del collare (F
c
);
4) la costante delle molle (k).
SOLUZIONE
La forza esercitata da ciascuna molla si ricava dalla relazione (64) risolta rispetto a F
m
:
N
i
F
F
a
m
75 , 81
03 , 0 2
81 , 9 5 , 0
2
=
= =
Il peso di un contrappeso si ricava dalla relazione (59) sostituendo r con b e risolvendo
rispetto a P :
N
b n
F
P
m
3 , 12
15 , 0
60
200
4
75 , 81
4
2 2
=
|
.
|
\
|
~
Si determinano adesso i limiti di intervento del regolatore facendo sistema con le relazioni
(39) e (65):
=
+
=
=
=
200
2
03 , 0
min max
min max
n n
n
n
n n
s
= +
=
400
6
min max
min max
n n
n n
Risolvendo si ricavano:
=
=
min / 197
min / 203
min
max
giri n
giri n
Il valore della forza centrifuga massima e minima uguale alla reazione della molla
massima e minima in corrispondenza delle posizioni estreme del collare (equilibrio dinamico),
Dispensa a cura del Prof. D. Piperis - ITIS G. Marconi - Bari - Corso Serale Progetto Sirio 43
pertanto si possono ricavare tramite le relazioni (62) e (63) risolte rispetto a F
m
dopo aver calcolato
i valori di r
min
e r
max
:
mm
c
b r mm
c
b r 200 50 150
2
; 100 50 150
2
max 2 min
= + = + = = = =
N n r P F F
m c
6 , 112
60
203
2 , 0 3 , 12 4 4
2
2
max max max max
= |
.
|
\
|
= = =
N n r P F F
m c
53
60
197
1 , 0 3 , 12 4 4
2
2
min min min min
= |
.
|
\
|
= = =
La forza che produce lallungamento della molla si pu calcolare con la seguente relazione:
N F F F
c c
6 , 59 53 6 , 112
min max
= = =
La relazione elastica della molla data da:
c k F =
pertanto si ricava:
m N
c
F
k / 596
1 , 0
6 , 59
= = =
Vous aimerez peut-être aussi
- Ruote Dentate A Denti ElicoidaliDocument13 pagesRuote Dentate A Denti Elicoidalidpiperis1118100% (1)
- Ruote Dentate A Denti ElicoidaliDocument13 pagesRuote Dentate A Denti Elicoidalidpiperis1118100% (1)
- Rotismi Ordinari Ed EpicicloidaliDocument23 pagesRotismi Ordinari Ed Epicicloidalidpiperis1118100% (4)
- Trasmissioni MeccanicheDocument16 pagesTrasmissioni MeccanicheClaudioPas encore d'évaluation
- Ruote Dentate A Denti DirittiDocument22 pagesRuote Dentate A Denti Dirittidpiperis1118100% (3)
- Avalle Polito PDFDocument205 pagesAvalle Polito PDFGianni CiavattaPas encore d'évaluation
- Dispensa Esercizi 01Document45 pagesDispensa Esercizi 01xevni100% (1)
- TermodinamicaDocument44 pagesTermodinamicadpiperis1118100% (1)
- Elettrotecnica e Macchine ElettricheDocument96 pagesElettrotecnica e Macchine ElettricheIgor BruniPas encore d'évaluation
- Esercizi Di Meccanica ApplicataDocument19 pagesEsercizi Di Meccanica Applicatasilvano andornoPas encore d'évaluation
- Cinghie Piatte e TrapezoidaliDocument41 pagesCinghie Piatte e Trapezoidalidpiperis111867% (6)
- I CuscinettiI VolventiDocument7 pagesI CuscinettiI Volventidpiperis1118100% (1)
- I CuscinettiI VolventiDocument7 pagesI CuscinettiI Volventidpiperis1118100% (1)
- Scambiatori Di CaloreDocument64 pagesScambiatori Di CaloreemilioPas encore d'évaluation
- Calcolo Durata BronzineDocument34 pagesCalcolo Durata BronzineMatteo Galli100% (1)
- Esercizi di fisica per licei: fluidodinamica e termodinamicaD'EverandEsercizi di fisica per licei: fluidodinamica e termodinamicaÉvaluation : 5 sur 5 étoiles5/5 (1)
- Trasmissione Della PotenzaDocument13 pagesTrasmissione Della Potenzadpiperis1118100% (1)
- Trasmissione Della PotenzaDocument13 pagesTrasmissione Della Potenzadpiperis1118100% (1)
- Prontuario Scienze Delle CostruzioniDocument9 pagesProntuario Scienze Delle CostruzioniGiulio PalamàPas encore d'évaluation
- Elementi Di Meccanica PDFDocument55 pagesElementi Di Meccanica PDFMatteoPas encore d'évaluation
- ECM Appunti Sulle Ruote DentateDocument34 pagesECM Appunti Sulle Ruote DentateFrank WhittlePas encore d'évaluation
- Raddrizzatori A DiodiDocument45 pagesRaddrizzatori A DiodiCristian BandilaPas encore d'évaluation
- Esercizi Sforzo Di Snervamento Svolto BeneDocument48 pagesEsercizi Sforzo Di Snervamento Svolto BeneMekonen Magoga0% (1)
- Fatica OligociclicaDocument32 pagesFatica OligociclicaFerruccio Rossi100% (1)
- Meccanica Applicata Alle Macchine 2 La Trasmissione Del Moto PDFDocument234 pagesMeccanica Applicata Alle Macchine 2 La Trasmissione Del Moto PDFciroPas encore d'évaluation
- Esercizi TrasmissioniDocument14 pagesEsercizi TrasmissioniFrancesco CangioliPas encore d'évaluation
- Trasmissione MeccanicaDocument19 pagesTrasmissione MeccanicaMizaPas encore d'évaluation
- Esercizi Macchine A Fluido PDFDocument24 pagesEsercizi Macchine A Fluido PDFalbertoterrPas encore d'évaluation
- Trasmissioni Di Potenza e Ruote DentateDocument20 pagesTrasmissioni Di Potenza e Ruote DentateStefano Holly PizzoPas encore d'évaluation
- Eserciziario Piscaglia-OnoratiDocument35 pagesEserciziario Piscaglia-Onoratikirokiro92Pas encore d'évaluation
- Tesina Damiano ComplDocument20 pagesTesina Damiano Complxlord7328Pas encore d'évaluation
- Cuscinetti A RotolamentoDocument10 pagesCuscinetti A RotolamentoMaurizio La VillettaPas encore d'évaluation
- Motori A Combustione InternaDocument20 pagesMotori A Combustione Internamatealoredana8015Pas encore d'évaluation
- Introduzione Ruote DentateDocument9 pagesIntroduzione Ruote DentateKara HensleyPas encore d'évaluation
- Esercizi4 CuscinettiDocument3 pagesEsercizi4 CuscinettiHernan MarianiPas encore d'évaluation
- Quadrilatero ArticolatoDocument9 pagesQuadrilatero ArticolatoraffacapPas encore d'évaluation
- MAP - Es - 6 ProvvisorioDocument5 pagesMAP - Es - 6 ProvvisorioFrancesco Provenzano100% (1)
- Esercizio Sul Motore EndotermicoDocument6 pagesEsercizio Sul Motore Endotermicodpiperis1118Pas encore d'évaluation
- Lezione CM - Giunti - 2436341Document55 pagesLezione CM - Giunti - 2436341Ebooks KingdomPas encore d'évaluation
- Relazione 1Document18 pagesRelazione 1pexsot87100% (2)
- Relazione Tecnica CuscinettiDocument7 pagesRelazione Tecnica Cuscinettitoldone92Pas encore d'évaluation
- Lezione 20181212 RotismiDocument12 pagesLezione 20181212 RotismiAlme d'EcclesiisPas encore d'évaluation
- Verifica A Fatica Dei Cuscinetti LucaDocument4 pagesVerifica A Fatica Dei Cuscinetti LucaWilliam MoscaPas encore d'évaluation
- 7 Ciclo+diesel+ideale+esercizioDocument2 pages7 Ciclo+diesel+ideale+esercizioHernan MarianiPas encore d'évaluation
- Compressori CentrifughiDocument35 pagesCompressori CentrifughibobtvcmvljyxazlkmbPas encore d'évaluation
- Generazione Per Inviluppo Di Ruote Dentate Ad Evolvente - GM PDFDocument44 pagesGenerazione Per Inviluppo Di Ruote Dentate Ad Evolvente - GM PDFmgualdiPas encore d'évaluation
- Accoppiamenti Per Alberi ConsigliatiDocument1 pageAccoppiamenti Per Alberi ConsigliaticamincPas encore d'évaluation
- AlberiDocument12 pagesAlberimarco.dado2700Pas encore d'évaluation
- 14 MeccanicaFratturaDocument5 pages14 MeccanicaFratturaGiorgio ConcuPas encore d'évaluation
- Teorica e Pratica Del Regolo CalcolatoreDocument199 pagesTeorica e Pratica Del Regolo CalcolatoreioannesturrisoricisPas encore d'évaluation
- Compressore AlternativoDocument4 pagesCompressore AlternativoDonato LovalloPas encore d'évaluation
- 02 Progetto CambioDocument19 pages02 Progetto Cambiomgualdi100% (1)
- Le Ruote DentateDocument28 pagesLe Ruote DentateAne CorralPas encore d'évaluation
- 01 parteVII FaticaDocument71 pages01 parteVII FaticaHernan MarianiPas encore d'évaluation
- CAP12 AzionineicontattidicombaciamentoDocument90 pagesCAP12 AzionineicontattidicombaciamentomgualdiPas encore d'évaluation
- MolleDocument10 pagesMolleorpheus984Pas encore d'évaluation
- Esercizi MeccAppDocument51 pagesEsercizi MeccAppPaoloMaccaronioPas encore d'évaluation
- Macchine Elettriche - Galilei, MirandolaDocument280 pagesMacchine Elettriche - Galilei, Mirandolarewq999Pas encore d'évaluation
- Macchine A FluidoDocument47 pagesMacchine A FluidoLeo LonardelliPas encore d'évaluation
- Macchine 05 PDFDocument32 pagesMacchine 05 PDFbrufraPas encore d'évaluation
- Ruote Statica DispenseDocument12 pagesRuote Statica DispenseRiccardo CirulliPas encore d'évaluation
- DM L04 Ruote DentateDocument15 pagesDM L04 Ruote DentateDaniloPas encore d'évaluation
- Albero MotoreDocument40 pagesAlbero MotoremarcopasottiPas encore d'évaluation
- TENSIONI Su Piani Obliqui Rispetto Alla Direzione Dello SforzoDocument15 pagesTENSIONI Su Piani Obliqui Rispetto Alla Direzione Dello Sforzodpiperis1118Pas encore d'évaluation
- 14 - ESERCIZI Sulle Turbine IdraulicheDocument9 pages14 - ESERCIZI Sulle Turbine Idraulichedpiperis1118Pas encore d'évaluation
- 1.1 - RUOTE Di FrizioneDocument13 pages1.1 - RUOTE Di Frizionedpiperis1118Pas encore d'évaluation
- IDRAULICA e Macchine IdraulicheDocument65 pagesIDRAULICA e Macchine Idraulichedpiperis1118Pas encore d'évaluation
- Esercizio Sul Motore EndotermicoDocument6 pagesEsercizio Sul Motore Endotermicodpiperis1118Pas encore d'évaluation