Vous aimerez peut-être aussi
- Modeling An Inverted PendulumDocument45 pagesModeling An Inverted Pendulumjunaid_honey83896770% (1)
- MATLAB Bus SuspensionDocument6 pagesMATLAB Bus SuspensionBluecloud Krishnan100% (3)
- Modeling Cruise ControlDocument252 pagesModeling Cruise Controlbudi_umm100% (1)
- Automatic Bus Suspension PID Controller DesignDocument50 pagesAutomatic Bus Suspension PID Controller Designchuhuynh100% (1)
- Modeling A Cruise Control SystemDocument23 pagesModeling A Cruise Control SystemAl Mutiry Muard100% (3)
- Bus Suspension SystemDocument28 pagesBus Suspension SystemNor Diyana AhmadPas encore d'évaluation
- Final Project - PPT On MIMO SystemDocument27 pagesFinal Project - PPT On MIMO SystemDebayan Sen100% (2)
- MIMO Control (Multiple Input Multiple Output)Document17 pagesMIMO Control (Multiple Input Multiple Output)Sohail Aziz Ahmad MalikPas encore d'évaluation
- LQR Linear Quadratic Regulator: A State Space Optimal Control Technique Brett ShapiroDocument41 pagesLQR Linear Quadratic Regulator: A State Space Optimal Control Technique Brett ShapirorameshsmePas encore d'évaluation
- Time Response AnalysisDocument43 pagesTime Response AnalysisAkmal IsnaeniPas encore d'évaluation
- The Cart With An Inverted PendulumDocument5 pagesThe Cart With An Inverted PendulumvlrsenthilPas encore d'évaluation
- Compensation in Control SystemDocument10 pagesCompensation in Control Systemshouvikchaudhuri0% (1)
- Lecture 9-10 - Frequency Response MethodsDocument68 pagesLecture 9-10 - Frequency Response MethodsDerrick Maatla Moadi100% (1)
- Ac Ac ConverterDocument56 pagesAc Ac ConverterPutri Hanifah SPas encore d'évaluation
- Systems and Control PDFDocument9 pagesSystems and Control PDFHamid Farhan0% (1)
- 3 Inverted Pendulum ProjectDocument26 pages3 Inverted Pendulum ProjectJoshua D JohnPas encore d'évaluation
- Feedback Control Performance MeasuresDocument37 pagesFeedback Control Performance MeasuresmrkmatPas encore d'évaluation
- DC Motor State Space ModelDocument5 pagesDC Motor State Space ModelSelaRajPas encore d'évaluation
- Dynamics of Mechanical SystemsDocument199 pagesDynamics of Mechanical Systemsrenebb0% (1)
- Free Vibration of Hysterically Damped Bridge StructureDocument7 pagesFree Vibration of Hysterically Damped Bridge StructureDaniel CBPas encore d'évaluation
- Design ProjectDocument22 pagesDesign ProjectRobert T KasumiPas encore d'évaluation
- Model Gravity Flow TankDocument11 pagesModel Gravity Flow TankTiar_Rahman_9553Pas encore d'évaluation
- Inverted PendulumDocument4 pagesInverted PendulumFerbPas encore d'évaluation
- State SpaceDocument48 pagesState SpacekanchiPas encore d'évaluation
- Car Suspension Over BumpDocument23 pagesCar Suspension Over BumpVairasivam Karisna KumarPas encore d'évaluation
- State Errors - Steady: Eman Ahmad KhalafDocument28 pagesState Errors - Steady: Eman Ahmad KhalafAhmed Mohammed khalfPas encore d'évaluation
- Lect11 Design Via State SpaceDocument49 pagesLect11 Design Via State SpaceMirza Riyasat AliPas encore d'évaluation
- ME2142-2 Lab MAnual Speed and Position ControlDocument9 pagesME2142-2 Lab MAnual Speed and Position ControlMohammad Taha IrfanPas encore d'évaluation
- Elements of Mechatronics: V. ThulasikanthDocument46 pagesElements of Mechatronics: V. ThulasikanthNeela MuraliPas encore d'évaluation
- Numerical Sheet Control SystemsDocument20 pagesNumerical Sheet Control SystemsKAMARAJU SAI VAMSHIPas encore d'évaluation
- Dynamic Characteristics of Sensors and Measurement SystemsDocument29 pagesDynamic Characteristics of Sensors and Measurement SystemsveenadivyakishPas encore d'évaluation
- Unit IV Question Bank MV 2019 MDOFs PDFDocument2 pagesUnit IV Question Bank MV 2019 MDOFs PDFSachin BharadwajPas encore d'évaluation
- Digital Control Systems: Stability Analysis of Discrete Time SystemsDocument33 pagesDigital Control Systems: Stability Analysis of Discrete Time SystemsRohan100% (1)
- Me2142-2 Speed/Position Control of A DC Motor: Department of Mechanical Engineering National University of SingaporeDocument9 pagesMe2142-2 Speed/Position Control of A DC Motor: Department of Mechanical Engineering National University of SingaporeDeepak RainaPas encore d'évaluation
- Compensator Design Using Bode PlotDocument24 pagesCompensator Design Using Bode PlotShah JayPas encore d'évaluation
- Stability: Control Engineering and Signal Processing Michala Srnová 2009/2010Document12 pagesStability: Control Engineering and Signal Processing Michala Srnová 2009/2010srnkaPas encore d'évaluation
- Parallel AdderDocument20 pagesParallel AddermdbelalrshdPas encore d'évaluation
- QUBE-Servo DC Motor ModelingDocument5 pagesQUBE-Servo DC Motor Modelingandres guerreroPas encore d'évaluation
- T3-5 Suspension System PDFDocument20 pagesT3-5 Suspension System PDFGunjan TrivediPas encore d'évaluation
- LFC using Simulink for single and two area systemsDocument21 pagesLFC using Simulink for single and two area systemsSubhash PuttiPas encore d'évaluation
- Turbine Supervisory InstrumentationDocument3 pagesTurbine Supervisory InstrumentationMAS98Pas encore d'évaluation
- Control SystemsDocument160 pagesControl SystemsPintu DeyPas encore d'évaluation
- Chapter 1 EbelingDocument28 pagesChapter 1 Ebelingrizqiaisyah100% (1)
- Experiment No. 13 Open Ended Lab Inverted Pendulum Using State-Space MethodDocument5 pagesExperiment No. 13 Open Ended Lab Inverted Pendulum Using State-Space MethodSH NoorPas encore d'évaluation
- Bode PlotDocument7 pagesBode Plotnabilo20Pas encore d'évaluation
- Dynamic Charactorstics of An InstrumentsDocument30 pagesDynamic Charactorstics of An InstrumentsDhinakaran VeemanPas encore d'évaluation
- Tut 3Document3 pagesTut 3mohanrajgupta1950% (2)
- Servo Motor Modeling in SimulinkDocument10 pagesServo Motor Modeling in SimulinkRose GutierrezPas encore d'évaluation
- 1 Flexible Link ProjectDocument15 pages1 Flexible Link Projectprasaad08Pas encore d'évaluation
- Vibration Analysis of Forced Harmonic OscillationDocument19 pagesVibration Analysis of Forced Harmonic OscillationRakesh BhaskerPas encore d'évaluation
- Moment of InertiaDocument33 pagesMoment of InertiaHasanur Rahman MishuPas encore d'évaluation
- Antenna AzimuthDocument3 pagesAntenna AzimuthAnonymous PyFkX4jYVWPas encore d'évaluation
- Nyquist Stability CriterionDocument20 pagesNyquist Stability CriterionmoosuhaibPas encore d'évaluation
- Modeling Tutorial: Train System DynamicsDocument10 pagesModeling Tutorial: Train System DynamicszemanesantosPas encore d'évaluation
- Ejemplos Tutorial Control Con Matlab PDFDocument129 pagesEjemplos Tutorial Control Con Matlab PDFRicardo TroncosoPas encore d'évaluation
- Control Tutorials For MATLAB and Simulink - Cruise Control - System ModelingDocument3 pagesControl Tutorials For MATLAB and Simulink - Cruise Control - System Modelingdialauchenna100% (1)
- Passive Suspoension Modeling Using Matlab Quarter Car Model Imput Isngal Step TypeDocument6 pagesPassive Suspoension Modeling Using Matlab Quarter Car Model Imput Isngal Step TypeChristian Mavarez0% (2)
- Modeling a Passive Vehicle Suspension System Using MATLABDocument6 pagesModeling a Passive Vehicle Suspension System Using MATLABBenjamin FullerPas encore d'évaluation
- Physical Setup System Parameters Design Criteria System EquationsDocument55 pagesPhysical Setup System Parameters Design Criteria System EquationsEca AditPas encore d'évaluation
- Sistem Modeling: Physical Setup System Parameters Design Criteria System EquationsDocument52 pagesSistem Modeling: Physical Setup System Parameters Design Criteria System EquationsSepdifa D. RifayanaPas encore d'évaluation
- Hello WorkDocument1 pageHello WorkHelios FlaresPas encore d'évaluation
- Xilinx TutorialDocument45 pagesXilinx Tutorialprof_ktPas encore d'évaluation
- Finite State Machine Design and VHDL Coding TechniquesDocument6 pagesFinite State Machine Design and VHDL Coding TechniquesHelios FlaresPas encore d'évaluation
- Xilinx TutorialDocument45 pagesXilinx Tutorialprof_ktPas encore d'évaluation
- TRLDocument29 pagesTRLHelios FlaresPas encore d'évaluation
- Bentone 30 Msds (Eu-Be)Document6 pagesBentone 30 Msds (Eu-Be)Amir Ososs0% (1)
- Analyze Oil Wear DebrisDocument2 pagesAnalyze Oil Wear Debristhoma111sPas encore d'évaluation
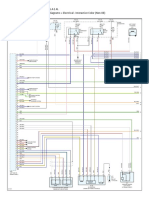
- Engine Controls (Powertrain Management) - ALLDATA RepairDocument4 pagesEngine Controls (Powertrain Management) - ALLDATA Repairmemo velascoPas encore d'évaluation
- Portable dual-input thermometer with RS232 connectivityDocument2 pagesPortable dual-input thermometer with RS232 connectivityTaha OpedPas encore d'évaluation
- Tech Letter-NFPA 54 To Include Bonding 8-08Document2 pagesTech Letter-NFPA 54 To Include Bonding 8-08gl lugaPas encore d'évaluation
- Haul Cables and Care For InfrastructureDocument11 pagesHaul Cables and Care For InfrastructureSathiyaseelan VelayuthamPas encore d'évaluation
- Rebranding Brief TemplateDocument8 pagesRebranding Brief TemplateRushiraj Patel100% (1)
- Conplast SP430 0407Document4 pagesConplast SP430 0407Harz IndPas encore d'évaluation
- Theme Meal ReportDocument10 pagesTheme Meal Reportapi-434982019Pas encore d'évaluation
- De Thi Chuyen Hai Duong 2014 2015 Tieng AnhDocument4 pagesDe Thi Chuyen Hai Duong 2014 2015 Tieng AnhHuong NguyenPas encore d'évaluation
- Variable Displacement Closed Circuit: Model 70160 Model 70360Document56 pagesVariable Displacement Closed Circuit: Model 70160 Model 70360michael bossa alistePas encore d'évaluation
- CadLink Flyer 369044 937 Rev 00Document2 pagesCadLink Flyer 369044 937 Rev 00ShanaHPas encore d'évaluation
- Khadi Natural Company ProfileDocument18 pagesKhadi Natural Company ProfileKleiton FontesPas encore d'évaluation
- Palmetto Bay's Ordinance On Bird RefugeDocument4 pagesPalmetto Bay's Ordinance On Bird RefugeAndreaTorresPas encore d'évaluation
- DSA NotesDocument87 pagesDSA NotesAtefrachew SeyfuPas encore d'évaluation
- Spouses Mariano Z. Velarde and Avelina D. VELARDE, Petitioners, vs. COURT OF Appeals, David A. RAYMUNDO and GEORGE RAYMUNDO, RespondentsDocument11 pagesSpouses Mariano Z. Velarde and Avelina D. VELARDE, Petitioners, vs. COURT OF Appeals, David A. RAYMUNDO and GEORGE RAYMUNDO, RespondentsRobyn JonesPas encore d'évaluation
- UKIERI Result Announcement-1Document2 pagesUKIERI Result Announcement-1kozhiiiPas encore d'évaluation
- FEM Lecture Notes-2Document18 pagesFEM Lecture Notes-2macynthia26Pas encore d'évaluation
- Create A Gmail Account in Some Simple StepsDocument9 pagesCreate A Gmail Account in Some Simple Stepsptjain02Pas encore d'évaluation
- UW Computational-Finance & Risk Management Brochure Final 080613Document2 pagesUW Computational-Finance & Risk Management Brochure Final 080613Rajel MokPas encore d'évaluation
- Complaint Handling Policy and ProceduresDocument2 pagesComplaint Handling Policy and Proceduresjyoti singhPas encore d'évaluation
- Sapkale Sandspit 2020Document5 pagesSapkale Sandspit 2020jbs_geoPas encore d'évaluation
- Las Q1Document9 pagesLas Q1Gaux SkjsjaPas encore d'évaluation
- Meanwhile Elsewhere - Lizzie Le Blond.1pdfDocument1 pageMeanwhile Elsewhere - Lizzie Le Blond.1pdftheyomangamingPas encore d'évaluation
- 4.5.1 Forestry LawsDocument31 pages4.5.1 Forestry LawsMark OrtolaPas encore d'évaluation
- Difference Between OS1 and OS2 Single Mode Fiber Cable - Fiber Optic Cabling SolutionsDocument2 pagesDifference Between OS1 and OS2 Single Mode Fiber Cable - Fiber Optic Cabling SolutionsDharma Teja TanetiPas encore d'évaluation
- Metamorphic Rocks ImagesDocument7 pagesMetamorphic Rocks Imagesapi-289985616100% (1)
- Chapter 7 - Cash BudgetDocument23 pagesChapter 7 - Cash BudgetMostafa KaghaPas encore d'évaluation
- Learning HotMetal Pro 6 - 132Document332 pagesLearning HotMetal Pro 6 - 132Viên Tâm LangPas encore d'évaluation
- Lista Precio Septiembre 0609Document75 pagesLista Precio Septiembre 0609gPas encore d'évaluation
- LIT: Life Ignition Tools: Use Nature's Playbook to Energize Your Brain, Spark Ideas, and Ignite ActionD'EverandLIT: Life Ignition Tools: Use Nature's Playbook to Energize Your Brain, Spark Ideas, and Ignite ActionÉvaluation : 4 sur 5 étoiles4/5 (402)
- Mindset by Carol S. Dweck - Book Summary: The New Psychology of SuccessD'EverandMindset by Carol S. Dweck - Book Summary: The New Psychology of SuccessÉvaluation : 4.5 sur 5 étoiles4.5/5 (327)
- The Age of Magical Overthinking: Notes on Modern IrrationalityD'EverandThe Age of Magical Overthinking: Notes on Modern IrrationalityÉvaluation : 4 sur 5 étoiles4/5 (13)
- The Ultimate Guide To Memory Improvement TechniquesD'EverandThe Ultimate Guide To Memory Improvement TechniquesÉvaluation : 5 sur 5 étoiles5/5 (34)
- Techniques Exercises And Tricks For Memory ImprovementD'EverandTechniques Exercises And Tricks For Memory ImprovementÉvaluation : 4.5 sur 5 étoiles4.5/5 (40)
- The Ritual Effect: From Habit to Ritual, Harness the Surprising Power of Everyday ActionsD'EverandThe Ritual Effect: From Habit to Ritual, Harness the Surprising Power of Everyday ActionsÉvaluation : 3.5 sur 5 étoiles3.5/5 (3)
- Think This, Not That: 12 Mindshifts to Breakthrough Limiting Beliefs and Become Who You Were Born to BeD'EverandThink This, Not That: 12 Mindshifts to Breakthrough Limiting Beliefs and Become Who You Were Born to BePas encore d'évaluation
- The Comfort of Crows: A Backyard YearD'EverandThe Comfort of Crows: A Backyard YearÉvaluation : 4.5 sur 5 étoiles4.5/5 (23)
- Summary: The Psychology of Money: Timeless Lessons on Wealth, Greed, and Happiness by Morgan Housel: Key Takeaways, Summary & Analysis IncludedD'EverandSummary: The Psychology of Money: Timeless Lessons on Wealth, Greed, and Happiness by Morgan Housel: Key Takeaways, Summary & Analysis IncludedÉvaluation : 5 sur 5 étoiles5/5 (78)
- Outlive: The Science and Art of Longevity by Peter Attia: Key Takeaways, Summary & AnalysisD'EverandOutlive: The Science and Art of Longevity by Peter Attia: Key Takeaways, Summary & AnalysisÉvaluation : 4 sur 5 étoiles4/5 (1)
- Why We Die: The New Science of Aging and the Quest for ImmortalityD'EverandWhy We Die: The New Science of Aging and the Quest for ImmortalityÉvaluation : 3.5 sur 5 étoiles3.5/5 (2)
- Raising Mentally Strong Kids: How to Combine the Power of Neuroscience with Love and Logic to Grow Confident, Kind, Responsible, and Resilient Children and Young AdultsD'EverandRaising Mentally Strong Kids: How to Combine the Power of Neuroscience with Love and Logic to Grow Confident, Kind, Responsible, and Resilient Children and Young AdultsPas encore d'évaluation
- The Obesity Code: Unlocking the Secrets of Weight LossD'EverandThe Obesity Code: Unlocking the Secrets of Weight LossÉvaluation : 5 sur 5 étoiles5/5 (3)
- The Happiness Trap: How to Stop Struggling and Start LivingD'EverandThe Happiness Trap: How to Stop Struggling and Start LivingÉvaluation : 4 sur 5 étoiles4/5 (1)
- Roxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingD'EverandRoxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingÉvaluation : 5 sur 5 étoiles5/5 (4)
- Roxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingD'EverandRoxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (32)
- Raising Good Humans: A Mindful Guide to Breaking the Cycle of Reactive Parenting and Raising Kind, Confident KidsD'EverandRaising Good Humans: A Mindful Guide to Breaking the Cycle of Reactive Parenting and Raising Kind, Confident KidsÉvaluation : 4.5 sur 5 étoiles4.5/5 (169)
- The Body Keeps the Score by Bessel Van der Kolk, M.D. - Book Summary: Brain, Mind, and Body in the Healing of TraumaD'EverandThe Body Keeps the Score by Bessel Van der Kolk, M.D. - Book Summary: Brain, Mind, and Body in the Healing of TraumaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Garden Within: Where the War with Your Emotions Ends and Your Most Powerful Life BeginsD'EverandThe Garden Within: Where the War with Your Emotions Ends and Your Most Powerful Life BeginsPas encore d'évaluation
- Summary: Outlive: The Science and Art of Longevity by Peter Attia MD, With Bill Gifford: Key Takeaways, Summary & AnalysisD'EverandSummary: Outlive: The Science and Art of Longevity by Peter Attia MD, With Bill Gifford: Key Takeaways, Summary & AnalysisÉvaluation : 4.5 sur 5 étoiles4.5/5 (41)
- The Tennis Partner: A Doctor's Story of Friendship and LossD'EverandThe Tennis Partner: A Doctor's Story of Friendship and LossÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Summary: It Didn't Start with You: How Inherited Family Trauma Shapes Who We Are and How to End the Cycle By Mark Wolynn: Key Takeaways, Summary & AnalysisD'EverandSummary: It Didn't Start with You: How Inherited Family Trauma Shapes Who We Are and How to End the Cycle By Mark Wolynn: Key Takeaways, Summary & AnalysisÉvaluation : 5 sur 5 étoiles5/5 (3)
- Dark Psychology & Manipulation: Discover How To Analyze People and Master Human Behaviour Using Emotional Influence Techniques, Body Language Secrets, Covert NLP, Speed Reading, and Hypnosis.D'EverandDark Psychology & Manipulation: Discover How To Analyze People and Master Human Behaviour Using Emotional Influence Techniques, Body Language Secrets, Covert NLP, Speed Reading, and Hypnosis.Évaluation : 4.5 sur 5 étoiles4.5/5 (110)
- Summary: Limitless: Upgrade Your Brain, Learn Anything Faster, and Unlock Your Exceptional Life By Jim Kwik: Key Takeaways, Summary and AnalysisD'EverandSummary: Limitless: Upgrade Your Brain, Learn Anything Faster, and Unlock Your Exceptional Life By Jim Kwik: Key Takeaways, Summary and AnalysisÉvaluation : 5 sur 5 étoiles5/5 (8)