Vous aimerez peut-être aussi
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (120)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Ebooks - KFC Original Recipe ChickenDocument1 pageEbooks - KFC Original Recipe ChickensourjynxPas encore d'évaluation
- Linux OS Basic CommandsDocument132 pagesLinux OS Basic CommandsGurprem SinghPas encore d'évaluation
- Design Guideline For Industrial Track Projects - BNSF RailwayDocument67 pagesDesign Guideline For Industrial Track Projects - BNSF RailwayKhalil SaberPas encore d'évaluation
- 1270A596-018.2 Local HSM Manager v5.1.7Document154 pages1270A596-018.2 Local HSM Manager v5.1.7Faruk Taşlıca100% (1)
- rh124 9.0 Student GuideDocument672 pagesrh124 9.0 Student GuideBraiek Fares100% (2)
- UF98Document112 pagesUF98Ihab A OsmanPas encore d'évaluation
- Grounding Bonding Shielding - Vol2Document394 pagesGrounding Bonding Shielding - Vol2armcalderon100% (1)
- NDG Linux Essentials 2.0 FULL Answers 2021Document91 pagesNDG Linux Essentials 2.0 FULL Answers 2021mika0% (1)
- Paypal L3idDocument4 pagesPaypal L3idala eddine henchiriPas encore d'évaluation
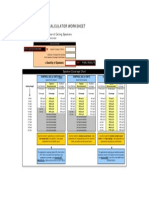
- Ceiling Speakers Calculator SheetDocument1 pageCeiling Speakers Calculator SheetIhab A OsmanPas encore d'évaluation
- Radio SpecsDocument10 pagesRadio SpecsIhab A OsmanPas encore d'évaluation
- New Zealand System of Buoys and BeaconsDocument28 pagesNew Zealand System of Buoys and BeaconsIhab A OsmanPas encore d'évaluation
- X50 Favorites E1Document2 pagesX50 Favorites E1Ihab A Osman100% (1)
- Caterpillar Installation of Manual Voltage ControlDocument2 pagesCaterpillar Installation of Manual Voltage ControlIhab A OsmanPas encore d'évaluation
- SI Units, Color Diagram (1s) PDFDocument1 pageSI Units, Color Diagram (1s) PDFMaurício Vicente TavaresPas encore d'évaluation
- Us CG GuideUS Cost GuardDocument1 pageUs CG GuideUS Cost GuardIhab A OsmanPas encore d'évaluation
- Emergency Management Institute FY13 CatalogDocument312 pagesEmergency Management Institute FY13 CatalogIhab A Osman100% (1)
- Radio ShelterDocument14 pagesRadio ShelterIhab A OsmanPas encore d'évaluation
- Tapper - Dnx4fn 0113 RaTapperDocument1 pageTapper - Dnx4fn 0113 RaTapperIhab A OsmanPas encore d'évaluation
- Technology For Hold Baggage ScreeningDocument23 pagesTechnology For Hold Baggage ScreeningIhab A OsmanPas encore d'évaluation
- DatasheetDocument2 pagesDatasheetIhab A Osman100% (1)
- DAS Support For MIMO AntennasDocument2 pagesDAS Support For MIMO AntennasIhab A OsmanPas encore d'évaluation
- Vehicle DetectorsDocument48 pagesVehicle DetectorsIhab A OsmanPas encore d'évaluation
- Incendio Diferencia Entre LAZOS CLASE A Y B A05-1003Document21 pagesIncendio Diferencia Entre LAZOS CLASE A Y B A05-1003rafaelPas encore d'évaluation
- AMX Product CatalogDocument118 pagesAMX Product CatalogIhab A OsmanPas encore d'évaluation
- Little C CompilerDocument2 pagesLittle C CompilerMartin Mendieta loraPas encore d'évaluation
- KernelBuild - Linux Kernel NewbiesDocument5 pagesKernelBuild - Linux Kernel Newbiesmyhomenet1191881100% (1)
- ZimbraDocument4 pagesZimbraAlejandro GuerreroPas encore d'évaluation
- Log 4 JDocument2 pagesLog 4 JAndreiGeorgescuPas encore d'évaluation
- A Blockchain WorkshopDocument2 pagesA Blockchain WorkshopMonik AlamandaPas encore d'évaluation
- BoilerplateDocument6 pagesBoilerplaterubinsonPas encore d'évaluation
- PerconaServer For MySQL PDFDocument482 pagesPerconaServer For MySQL PDFJohn NguyenPas encore d'évaluation
- Solucion A Problema de MenusDocument2 pagesSolucion A Problema de Menusandreko11Pas encore d'évaluation
- Text Computers 8Document4 pagesText Computers 8Quinone QuentinPas encore d'évaluation
- HwGUI Documentation 5Document6 pagesHwGUI Documentation 5João Rocha LabregoPas encore d'évaluation
- Msguides-Com-Office-2016 (Refer Method 1)Document12 pagesMsguides-Com-Office-2016 (Refer Method 1)demat69634Pas encore d'évaluation
- Nagios Server 1 Sudo Apt-Get UpdateDocument3 pagesNagios Server 1 Sudo Apt-Get UpdateRavi GhantasalaPas encore d'évaluation
- Software Stack: Android's Architecture DiagramDocument1 pageSoftware Stack: Android's Architecture DiagramDissasekaraPas encore d'évaluation
- Blender Pipeline PDFDocument12 pagesBlender Pipeline PDFRubbish SvashtaPas encore d'évaluation
- Cudnn Install GuideDocument2 pagesCudnn Install GuidethrostenPas encore d'évaluation
- Wireshark Ubuntu InstallationDocument8 pagesWireshark Ubuntu InstallationHein HtetPas encore d'évaluation
- The Official Full Circle Magazine Index - Full Circle IndexDocument96 pagesThe Official Full Circle Magazine Index - Full Circle IndexJack_bookPas encore d'évaluation
- McaFee VirusDocument7 pagesMcaFee ViruscesarjspPas encore d'évaluation
- Installation On Linux - GNS3Document8 pagesInstallation On Linux - GNS3Ict labPas encore d'évaluation
- Ubuntu As O.S.Document2 pagesUbuntu As O.S.Mcflurry MacalalagPas encore d'évaluation
- VSE OPC UA Server VOS050: Software ManualDocument39 pagesVSE OPC UA Server VOS050: Software ManualMOHAMED BOUZEBRAPas encore d'évaluation
- How To Auto Install All Kali Linux Tools Using Katoolin On DebianUbuntuDocument4 pagesHow To Auto Install All Kali Linux Tools Using Katoolin On DebianUbuntulist_coursePas encore d'évaluation
- Neda Business Plan PDFDocument72 pagesNeda Business Plan PDFLusajo Lazarus MwaisakaPas encore d'évaluation
- How To Install Asterisk 1.4 and Freepbx 2.3.1 in Ubuntu LinuxDocument11 pagesHow To Install Asterisk 1.4 and Freepbx 2.3.1 in Ubuntu LinuxOnny KhaeroniPas encore d'évaluation
- Manual DynareDocument99 pagesManual DynareJuan PalominoPas encore d'évaluation