Vous aimerez peut-être aussi
- T - C2019 Official Notes PDFDocument696 pagesT - C2019 Official Notes PDFPeter100% (9)
- The Design of An Unmanned Aerial Vehicle Based On The ArdupilotDocument4 pagesThe Design of An Unmanned Aerial Vehicle Based On The ArdupilotJoãoPauloLaudaresPas encore d'évaluation
- CPL Air Law ReviewerDocument10 pagesCPL Air Law ReviewerTorres Ron100% (2)
- Course - Ng-Bootstrap PlaybookDocument49 pagesCourse - Ng-Bootstrap PlaybookshyamVENKATPas encore d'évaluation
- All Weather OperationsDocument46 pagesAll Weather OperationsPRASADPas encore d'évaluation
- A RunDocument8 pagesA RunNisar KmPas encore d'évaluation
- PBN - Etops - IlsDocument6 pagesPBN - Etops - Ilslenniinn_dgcaPas encore d'évaluation
- All Weather Operations (AWO)Document52 pagesAll Weather Operations (AWO)Avneet RiatPas encore d'évaluation
- CMDF Programs and ServicesDocument3 pagesCMDF Programs and Servicessignup101Pas encore d'évaluation
- D8o O3 PDFDocument80 pagesD8o O3 PDFhaider551Pas encore d'évaluation
- D8O-O5 (Draft Jan2017)Document40 pagesD8O-O5 (Draft Jan2017)Mário MineiroPas encore d'évaluation
- Robotics Helicopter Control and Its Applications in EngineeringDocument6 pagesRobotics Helicopter Control and Its Applications in EngineeringInternational Journal of computational Engineering research (IJCER)Pas encore d'évaluation
- Office of The Director General of Civil AviationDocument51 pagesOffice of The Director General of Civil Aviationmahima jajsPas encore d'évaluation
- Instrument Landing SystemDocument50 pagesInstrument Landing SystemZen Organis100% (1)
- Exploiting Unmanned Aircraft SystemsDocument27 pagesExploiting Unmanned Aircraft Systemsdaniel.duprePas encore d'évaluation
- All WX OpsDocument52 pagesAll WX OpsFerry 03augPas encore d'évaluation
- ArducopterDocument16 pagesArducopterSummer CoolPas encore d'évaluation
- Office of The Director General of Civil AviationDocument72 pagesOffice of The Director General of Civil Aviationgood dayPas encore d'évaluation
- Abstract.: On-Ship Landing and Takeoff of Unmanned Aerial Vehicles (Uav'S)Document5 pagesAbstract.: On-Ship Landing and Takeoff of Unmanned Aerial Vehicles (Uav'S)bang nguyen dinhPas encore d'évaluation
- Autonomous UAV With Human Detection: Kshitij Karnawat, Nihar Asare, Sumit Anilkumar Singh, and Anju KulkarniDocument7 pagesAutonomous UAV With Human Detection: Kshitij Karnawat, Nihar Asare, Sumit Anilkumar Singh, and Anju KulkarniexamplePas encore d'évaluation
- International Standards and Recommended Practices: Annex 6 - PartiiiDocument10 pagesInternational Standards and Recommended Practices: Annex 6 - PartiiiRiyancy RajapakshaPas encore d'évaluation
- Unmanned Aerial VehicleDocument178 pagesUnmanned Aerial Vehicletanveershariff13Pas encore d'évaluation
- d8c-c1 (July2015) (All Weather Operations (AWO) )Document52 pagesd8c-c1 (July2015) (All Weather Operations (AWO) )JohnPas encore d'évaluation
- All Weather Operation RegulationsDocument102 pagesAll Weather Operation RegulationsIanko StoimenovPas encore d'évaluation
- Civil Aviation Requirements ApproachesDocument105 pagesCivil Aviation Requirements ApproachesAna AlvesPas encore d'évaluation
- AR-Drone As A Platform For Robotic Research and Education: (Tkrajnik, Vonasek, Danfis, Xfaigl) @labe - Felk.cvut - CZDocument15 pagesAR-Drone As A Platform For Robotic Research and Education: (Tkrajnik, Vonasek, Danfis, Xfaigl) @labe - Felk.cvut - CZSusi Yayang AstrianiPas encore d'évaluation
- HILSDocument8 pagesHILSsakthi ambrosePas encore d'évaluation
- Autonomous Flight: AIAA Group 6 Mat ThompsonDocument24 pagesAutonomous Flight: AIAA Group 6 Mat ThompsonPrashant KumarPas encore d'évaluation
- CPL - Al PDFDocument10 pagesCPL - Al PDFLolito Pioco IVPas encore d'évaluation
- Pcar Summarized 2Document13 pagesPcar Summarized 2Logahin YaherPas encore d'évaluation
- A Vision-Based Automatic Landing Method For Fixed Wing UAVsDocument15 pagesA Vision-Based Automatic Landing Method For Fixed Wing UAVsAli YasinPas encore d'évaluation
- FYP Research Paper SSUET FINALDocument5 pagesFYP Research Paper SSUET FINALNabeel ShahzadPas encore d'évaluation
- Hong Kong Civil AviationDocument14 pagesHong Kong Civil AviationRezky RendraPas encore d'évaluation
- Wireless Control Quadcopter With Stereo Camera: P.Manoj, S.GokulakannanDocument24 pagesWireless Control Quadcopter With Stereo Camera: P.Manoj, S.GokulakannanManojPas encore d'évaluation
- 1.1 DefinitionDocument10 pages1.1 DefinitionArohee rijalPas encore d'évaluation
- MoCA Guidelines SlotAllocation21513Document8 pagesMoCA Guidelines SlotAllocation21513Chandra SekaranPas encore d'évaluation
- Mayday FuelDocument95 pagesMayday FuelEniyavan SekarPas encore d'évaluation
- Remotely Piloted Aircraft System (RPAS)Document24 pagesRemotely Piloted Aircraft System (RPAS)Latest Laws TeamPas encore d'évaluation
- Project .... Software Requirements SpecificationDocument24 pagesProject .... Software Requirements SpecificationAikya VarmaPas encore d'évaluation
- Draft QRs and TDs of Mini UAV SYstem-6Document16 pagesDraft QRs and TDs of Mini UAV SYstem-6Sonia RainaPas encore d'évaluation
- Scheduled Performance of Multi-Engine Transport AircraftDocument30 pagesScheduled Performance of Multi-Engine Transport AircraftAyush KmaPas encore d'évaluation
- Saripalli 2002Document6 pagesSaripalli 2002Shubham SinghalPas encore d'évaluation
- (J) - 2024 - Vision-Based Autonomous Landing and Charging System For A Hexacopter DroneDocument13 pages(J) - 2024 - Vision-Based Autonomous Landing and Charging System For A Hexacopter Dronedr.awawdeh.moathPas encore d'évaluation
- Non Towered Aerodrome Ops PDFDocument16 pagesNon Towered Aerodrome Ops PDFjunk5154100% (2)
- BHSAiropsMOOC - Supplemental Glossary TermsDocument3 pagesBHSAiropsMOOC - Supplemental Glossary Termstanveer369Pas encore d'évaluation
- Better International Trip Planning: The Challenge: Regulatory ComplianceDocument7 pagesBetter International Trip Planning: The Challenge: Regulatory Compliancejunebug172Pas encore d'évaluation
- Surveillance Avionics ArchitectureDocument30 pagesSurveillance Avionics ArchitectureAryPas encore d'évaluation
- Operational-Procedure-Jaa Atpl QuestionsDocument131 pagesOperational-Procedure-Jaa Atpl QuestionsAnita MukulaPas encore d'évaluation
- Abstract of The Project ThesisDocument1 pageAbstract of The Project ThesisvenkatsahulPas encore d'évaluation
- Hoffmann Et Al Quadrotor DASC04Document10 pagesHoffmann Et Al Quadrotor DASC04Damian ChmielewskiPas encore d'évaluation
- GUI Controlled Aerial Drone: Kartik Panicker, Vaibhav Murkute, Deepak Padhi, Akash NarkhedeDocument3 pagesGUI Controlled Aerial Drone: Kartik Panicker, Vaibhav Murkute, Deepak Padhi, Akash NarkhedeerpublicationPas encore d'évaluation
- Preparation and Execution of The First Flight of A Small Fixed Wing UavDocument5 pagesPreparation and Execution of The First Flight of A Small Fixed Wing UavGunar LeonhardtPas encore d'évaluation
- Unit IDocument94 pagesUnit IMachoPas encore d'évaluation
- UavDocument19 pagesUavArvind KeesaraPas encore d'évaluation
- Real-Time Indoor Autonomous Vehicle Test Environment PDFDocument14 pagesReal-Time Indoor Autonomous Vehicle Test Environment PDFPiyush Kumar DongrePas encore d'évaluation
- Vikram Patil UavDocument6 pagesVikram Patil Uavkaran11deshmukhPas encore d'évaluation
- Unit 1 Avionics ModifiedDocument127 pagesUnit 1 Avionics ModifiedparantnPas encore d'évaluation
- Viper JetDocument4 pagesViper JetJaafar Ali MohamadPas encore d'évaluation
- Car - Uas (Draft - Nov2017)Document24 pagesCar - Uas (Draft - Nov2017)Akshay DolasPas encore d'évaluation
- U A V Unmanned Aerial Vehicles: by Achyuth & SarathDocument30 pagesU A V Unmanned Aerial Vehicles: by Achyuth & SarathnaveenPas encore d'évaluation
- A330 Normal Law: Putting Fly-by-Wire Into PerspectiveD'EverandA330 Normal Law: Putting Fly-by-Wire Into PerspectiveÉvaluation : 5 sur 5 étoiles5/5 (2)
- VFR and IFR Flight Training: Need to Know AcronymsD'EverandVFR and IFR Flight Training: Need to Know AcronymsÉvaluation : 4 sur 5 étoiles4/5 (6)
- CV-Agus Nugraha (11.01.2021)Document11 pagesCV-Agus Nugraha (11.01.2021)Agus NugrahaPas encore d'évaluation
- 3DReshaper LeicaPresentation2014Document12 pages3DReshaper LeicaPresentation2014cristicomanPas encore d'évaluation
- Software Standards: Unified Model Documentation Paper 003Document27 pagesSoftware Standards: Unified Model Documentation Paper 003Reno ChoiPas encore d'évaluation
- Lab 1 Level 0 Illumination Lux MeterDocument4 pagesLab 1 Level 0 Illumination Lux MeterTaufiq Al IlhamPas encore d'évaluation
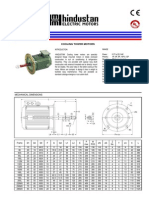
- Cooling Tower MotorDocument2 pagesCooling Tower MotorDipendraTomarPas encore d'évaluation
- Power Electronics Question BankDocument3 pagesPower Electronics Question BankHarish SudhanPas encore d'évaluation
- Block 1-Data Handling Using Pandas DataFrameDocument17 pagesBlock 1-Data Handling Using Pandas DataFrameBhaskar PVNPas encore d'évaluation
- Westinghouse WGen7500DF Spec SheetDocument2 pagesWestinghouse WGen7500DF Spec SheetgusmilexaPas encore d'évaluation
- CHD Candidate Guidebook PDFDocument20 pagesCHD Candidate Guidebook PDFsyammc0% (1)
- Core Task 2 - Ayushi BoliaDocument3 pagesCore Task 2 - Ayushi BoliaAyushi BoliaPas encore d'évaluation
- ClickFunnels Vs WebsiteDocument2 pagesClickFunnels Vs WebsiteJOEYPas encore d'évaluation
- Amdocs Interview QuestionsDocument3 pagesAmdocs Interview QuestionsOmkar J Goulay0% (1)
- Contoh P&IDDocument1 pageContoh P&IDLudy Oji PrastamaPas encore d'évaluation
- IAY G05 C Part 2Document43 pagesIAY G05 C Part 2lokelooksPas encore d'évaluation
- Lec 1 - Introduction To Wireless & Mobile CommunicationDocument35 pagesLec 1 - Introduction To Wireless & Mobile CommunicationMuhammad Rehan ZafarPas encore d'évaluation
- 998-20710038 - Eliwell - NA - 2019a - Catalog - GMA - BrochureDocument60 pages998-20710038 - Eliwell - NA - 2019a - Catalog - GMA - BrochureTesoro HonPas encore d'évaluation
- Ieee 1147Document48 pagesIeee 1147Jose Antonio EstofaneroPas encore d'évaluation
- Zte Mg3030 ModuleDocument27 pagesZte Mg3030 Modulesardar87Pas encore d'évaluation
- Uct Business Systems Analysis Course Information PackDocument9 pagesUct Business Systems Analysis Course Information PackSulaimaniya Geniuses0% (1)
- Design of A Sequential Control CircuitDocument5 pagesDesign of A Sequential Control Circuitrt_srv08Pas encore d'évaluation
- 50-Article Text-90-1-10-20201130Document10 pages50-Article Text-90-1-10-20201130Ashih GuptaPas encore d'évaluation
- Saudi Arabian Oil Company: Equipment Noise Data SheetDocument1 pageSaudi Arabian Oil Company: Equipment Noise Data SheetAnonymous X3PnFL6Pas encore d'évaluation
- Inspection and Test Plan For Pressure Vessel Repair, Modification, AlterationDocument5 pagesInspection and Test Plan For Pressure Vessel Repair, Modification, AlterationMuhammed Abo-Fandood50% (2)
- Swagger Annotations: OpenapiDocument2 pagesSwagger Annotations: OpenapiSrinu SPas encore d'évaluation
- Smart Fire Alarm System Using ArduinoDocument2 pagesSmart Fire Alarm System Using Arduinokritwik barua100% (1)
- Lab Exercise 1 - Getting StartedDocument8 pagesLab Exercise 1 - Getting StartedMarcos JeremyPas encore d'évaluation
- Plantronics Voyager Pro Plus ManualDocument10 pagesPlantronics Voyager Pro Plus Manualbsd_storesPas encore d'évaluation
- Project Quality Management PMPDocument47 pagesProject Quality Management PMPnguyen728100% (2)