Vous aimerez peut-être aussi
- ES Analizadores Redes EMM CG Rev0Document2 pagesES Analizadores Redes EMM CG Rev0jairoberPas encore d'évaluation
- Service Manual EspañolDocument46 pagesService Manual EspañoljairoberPas encore d'évaluation
- Manual-Variador Sinamics 150Document533 pagesManual-Variador Sinamics 150jairober100% (1)
- Guia Control ProporcionalDocument3 pagesGuia Control ProporcionaljairoberPas encore d'évaluation
- Impacto de La Revolución Industrial en La EducacionDocument8 pagesImpacto de La Revolución Industrial en La EducacionAre FloresPas encore d'évaluation
- Anteproyecto (TVWS)Document17 pagesAnteproyecto (TVWS)JHON EDWARD VALENCIA ORTIZPas encore d'évaluation
- Lab8 5 2Document9 pagesLab8 5 2Jessica Carolina CalapaquiPas encore d'évaluation
- Microcontroladores PIC - Configuración de PuertosDocument4 pagesMicrocontroladores PIC - Configuración de PuertosPgab OrtegaPas encore d'évaluation
- Proyecto Final InversorDocument7 pagesProyecto Final InversorJuancarlos ArrietaPas encore d'évaluation
- Trabajo - Diseño - Zapata - Aislada - Grupo HDocument21 pagesTrabajo - Diseño - Zapata - Aislada - Grupo HnildaPas encore d'évaluation
- Practica ConectorizacionDocument8 pagesPractica ConectorizacionLuis VelascoPas encore d'évaluation
- Manual de UsuarioDocument5 pagesManual de UsuarioCuktaPas encore d'évaluation
- Caracterización de Proceso SenaDocument3 pagesCaracterización de Proceso SenaSergio GuillenPas encore d'évaluation
- CronogramanGeneral SENADocument5 pagesCronogramanGeneral SENAMichell PastranaPas encore d'évaluation
- Odor On LineDocument2 pagesOdor On LineRichard Ventura AndacabaPas encore d'évaluation
- 3 2 1 Planilla de Especificacion de RequerimientosDocument13 pages3 2 1 Planilla de Especificacion de RequerimientosGonzalo OpazoPas encore d'évaluation
- ENSAYO ARGUMENTATIVO - Impacto de Las Redes Sociales en El Ámbito Laboral - Grupo2Document10 pagesENSAYO ARGUMENTATIVO - Impacto de Las Redes Sociales en El Ámbito Laboral - Grupo2GERALDINE RAQUEL ZELAYA ONSIHUAYPas encore d'évaluation
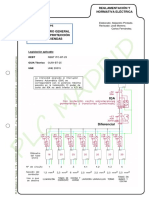
- Cuadro General de Mando y ProteccionDocument2 pagesCuadro General de Mando y ProteccionAnonymous BEAHDwiEkPas encore d'évaluation
- Chimbana Lenin Informe Detector Luz Lab ViewDocument11 pagesChimbana Lenin Informe Detector Luz Lab ViewLeninIsraelPas encore d'évaluation
- Mintzbergy Quinn Cap 4 (Texto Editable) - Sobre La EstrategiaDocument14 pagesMintzbergy Quinn Cap 4 (Texto Editable) - Sobre La EstrategiaDelgado García Paulina MarielPas encore d'évaluation
- Fase 2 - Formulacion - Kelis GarciaDocument11 pagesFase 2 - Formulacion - Kelis GarciakelisgarciaPas encore d'évaluation
- Gestion de Calidad A Una PanaderiaDocument99 pagesGestion de Calidad A Una Panaderiaramon53560% (2)
- Los InventariosDocument19 pagesLos InventariosMoises Quispe MendozaPas encore d'évaluation
- Mecanismos de Medición AnalógicosDocument5 pagesMecanismos de Medición AnalógicosFull TecnologiesPas encore d'évaluation
- Anexos Electromecánica - M4 - S2 - Manufactura Piezas en Fresadora CNC MejoradoDocument57 pagesAnexos Electromecánica - M4 - S2 - Manufactura Piezas en Fresadora CNC MejoradoAngel Osiris Palafox AmadorPas encore d'évaluation
- Comunicación - UD7 - DefwebDocument21 pagesComunicación - UD7 - DefwebInésPas encore d'évaluation
- Introduccion Puesta A TierraDocument28 pagesIntroduccion Puesta A Tierra85466780Pas encore d'évaluation
- Informe N°1Document12 pagesInforme N°1ALBORNOZ ESCALANTE CARLOS EDUARDOPas encore d'évaluation
- Estadística de Educación Primaria: Ciclo EscolarDocument22 pagesEstadística de Educación Primaria: Ciclo EscolarDaniel ZaratePas encore d'évaluation
- Proceso Camioneta MTC Item III PDFDocument16 pagesProceso Camioneta MTC Item III PDFIngrid Caceres HerreraPas encore d'évaluation
- Inspección Basada en Riesgos (RBI) : GC-F-004 V.01Document13 pagesInspección Basada en Riesgos (RBI) : GC-F-004 V.01LUIS DAVID ACEVEDO RUZPas encore d'évaluation
- U1MCA3-CAracteristicas y Operasion de Puertos Estantar 1.3Document2 pagesU1MCA3-CAracteristicas y Operasion de Puertos Estantar 1.3RiBarPas encore d'évaluation
- Jonathan Uriel Almeida GuerraDocument1 pageJonathan Uriel Almeida GuerraJonathan Uriel GuerraPas encore d'évaluation
- SEMANA 13 IS345 Sem 2016 IDocument7 pagesSEMANA 13 IS345 Sem 2016 Ieduard2707Pas encore d'évaluation
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroD'EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroÉvaluation : 4 sur 5 étoiles4/5 (1)
- 7 tendencias digitales que cambiarán el mundoD'Everand7 tendencias digitales que cambiarán el mundoÉvaluation : 4.5 sur 5 étoiles4.5/5 (87)
- PANADERÍA Y PASTELERÍA COMERCIALD'EverandPANADERÍA Y PASTELERÍA COMERCIALÉvaluation : 5 sur 5 étoiles5/5 (3)
- GuíaBurros Microsoft Excel: Todo lo que necesitas saber sobre esta potente hoja de cálculoD'EverandGuíaBurros Microsoft Excel: Todo lo que necesitas saber sobre esta potente hoja de cálculoÉvaluation : 3.5 sur 5 étoiles3.5/5 (6)
- Ciencia de datos: La serie de conocimientos esenciales de MIT PressD'EverandCiencia de datos: La serie de conocimientos esenciales de MIT PressÉvaluation : 5 sur 5 étoiles5/5 (1)
- Influencia. La psicología de la persuasiónD'EverandInfluencia. La psicología de la persuasiónÉvaluation : 4.5 sur 5 étoiles4.5/5 (14)
- UF0054: APROVISIONAMIENTO DE MATERIAS PRIMAS EN COCINA (HOTR0108)D'EverandUF0054: APROVISIONAMIENTO DE MATERIAS PRIMAS EN COCINA (HOTR0108)Pas encore d'évaluation
- 44 Apps Inteligentes para Ejercitar su Cerebro: Apps Gratuitas, Juegos, y Herramientas para iPhone, iPad, Google Play, Kindle Fire, Navegadores de Internet, Windows Phone, & Apple WatchD'Everand44 Apps Inteligentes para Ejercitar su Cerebro: Apps Gratuitas, Juegos, y Herramientas para iPhone, iPad, Google Play, Kindle Fire, Navegadores de Internet, Windows Phone, & Apple WatchÉvaluation : 3.5 sur 5 étoiles3.5/5 (2)
- La biblia del e-commerce: Los secretos de la venta online. Más de mil ideas para vender por internetD'EverandLa biblia del e-commerce: Los secretos de la venta online. Más de mil ideas para vender por internetÉvaluation : 5 sur 5 étoiles5/5 (7)
- Toma de decisiones en las empresas: Entre el arte y la técnica: Metodologías, modelos y herramientasD'EverandToma de decisiones en las empresas: Entre el arte y la técnica: Metodologías, modelos y herramientasPas encore d'évaluation