Vous aimerez peut-être aussi
- MANUAL3G3MX2Document440 pagesMANUAL3G3MX2Juan Sánchez LópezPas encore d'évaluation
- Three Phase Appliance ProtectorDocument40 pagesThree Phase Appliance ProtectorJeevan PreethuPas encore d'évaluation
- PID Control - ARAKIDocument23 pagesPID Control - ARAKILuiz Carlos da SilvaPas encore d'évaluation
- Simocode TermsDocument2 pagesSimocode TermsArunava BasakPas encore d'évaluation
- Process Control System A Complete Guide - 2020 EditionD'EverandProcess Control System A Complete Guide - 2020 EditionPas encore d'évaluation
- PID ControlDocument17 pagesPID ControlUma MageshwariPas encore d'évaluation
- Close Loop Control Sys IntroDocument7 pagesClose Loop Control Sys IntroDwi Mulyanti DwimulyantishopPas encore d'évaluation
- 1.1 Notes - Functional Elements of An InstrumentDocument4 pages1.1 Notes - Functional Elements of An InstrumentB. MeenakshiPas encore d'évaluation
- Selection Guide - E300 Electronic Overload Relay - 193-SG010E-En-P - January 2016Document36 pagesSelection Guide - E300 Electronic Overload Relay - 193-SG010E-En-P - January 2016Nicolás A. SelvaggioPas encore d'évaluation
- Control of Heat Recovery Steam GeneratorDocument5 pagesControl of Heat Recovery Steam Generatordrmsrmurty9473100% (5)
- Modern Intelligent Instruments - Theory and ApplicationD'EverandModern Intelligent Instruments - Theory and ApplicationPas encore d'évaluation
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsD'EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsPas encore d'évaluation
- DC-DC ChoppersDocument24 pagesDC-DC ChoppersAbdullah NasirPas encore d'évaluation
- VArticle - Thermal Design of APFC PanelsDocument4 pagesVArticle - Thermal Design of APFC PanelsChandru RangarajPas encore d'évaluation
- Controls Engineer InterviewDocument3 pagesControls Engineer Interviewrhoney0120% (1)
- Spec VSDDocument8 pagesSpec VSDNicodemus Ervino MandalaPas encore d'évaluation
- Technical Information: Model ZR22G, ZR402G Direct In-Situ Separate Type Zirconia Oxygen Analyzers (Hardware Edition)Document35 pagesTechnical Information: Model ZR22G, ZR402G Direct In-Situ Separate Type Zirconia Oxygen Analyzers (Hardware Edition)Atreyo SahaPas encore d'évaluation
- Switch Gear: Types of Switch GearsDocument6 pagesSwitch Gear: Types of Switch GearsAdeel Mustafa100% (1)
- Abes Engineering College, Ghaziabad: Department of Electronics & Communication EngineeringDocument80 pagesAbes Engineering College, Ghaziabad: Department of Electronics & Communication EngineeringJayan GoelPas encore d'évaluation
- Novel Method PMDC Motor Speed ControlDocument15 pagesNovel Method PMDC Motor Speed ControlTravis WoodPas encore d'évaluation
- Basics of Instrumentation TheoryDocument63 pagesBasics of Instrumentation TheorysanthoshramrPas encore d'évaluation
- 13 - Instrumentation & ControlDocument11 pages13 - Instrumentation & ControlNoman AslamPas encore d'évaluation
- Design Calculations For Buck-Boost Converters: Michael Green Advanced Low Power SolutionsDocument12 pagesDesign Calculations For Buck-Boost Converters: Michael Green Advanced Low Power SolutionsnandhakumarmePas encore d'évaluation
- CH 1 Intro 2 InstrumentationDocument22 pagesCH 1 Intro 2 InstrumentationNorkarlina Binti Khairul AriffinPas encore d'évaluation
- PLCDocument14 pagesPLCPrateek S VirdiPas encore d'évaluation
- Chapter 2 - Discrete-State Control Part IDocument37 pagesChapter 2 - Discrete-State Control Part IVon JinPas encore d'évaluation
- Flame SensorDocument5 pagesFlame SensorImranRafiqPas encore d'évaluation
- Simulation On Simulink AC4 Model (200hp DTC Induction Motor Drive) Using Fuzzy Logic ControllerDocument5 pagesSimulation On Simulink AC4 Model (200hp DTC Induction Motor Drive) Using Fuzzy Logic ControllerBook4AllPas encore d'évaluation
- 3 Discrimination by Both Time and CurrentDocument9 pages3 Discrimination by Both Time and CurrentEBEPas encore d'évaluation
- Model Based ControlDocument6 pagesModel Based ControlIvan RadovicPas encore d'évaluation
- SamaDocument8 pagesSamalosmoscasbr100% (1)
- Siemens Energy White PaperDocument12 pagesSiemens Energy White PaperRicky Respondo Tindoc100% (1)
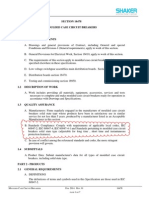
- Molded Case Circuit Breakers PDFDocument7 pagesMolded Case Circuit Breakers PDFMohamedAhmedFawzyPas encore d'évaluation
- Compensator Design Using Bode PlotDocument18 pagesCompensator Design Using Bode PlotHBPas encore d'évaluation
- ME8501 - Metrology and Measurements - Unit - IDocument30 pagesME8501 - Metrology and Measurements - Unit - Iarunpdc100% (1)
- Pid Controls PLC EnvironDocument22 pagesPid Controls PLC EnvironAbhinav GuptaPas encore d'évaluation
- Basic Instrumentation and Process ControlDocument2 pagesBasic Instrumentation and Process ControlathariqubalPas encore d'évaluation
- Fire Alarm System: Guide: DR - Sudhasree CH, (Assistant Professor)Document27 pagesFire Alarm System: Guide: DR - Sudhasree CH, (Assistant Professor)RAJA RATHNAM GHANTAPas encore d'évaluation
- Pid Loop SimulatorDocument9 pagesPid Loop SimulatorCarlos VidelaPas encore d'évaluation
- GSM Based Fault Monitoring SystemDocument23 pagesGSM Based Fault Monitoring SystemSanjana Singh100% (1)
- Control SystemDocument55 pagesControl SystemEr Rajdeep SahaPas encore d'évaluation
- Hazards ZoneDocument4 pagesHazards Zonedarsh2001patelPas encore d'évaluation
- Adr241a Do 01 810Document17 pagesAdr241a Do 01 810Vishwanath TodurkarPas encore d'évaluation
- Cable Size CalculationsDocument4 pagesCable Size CalculationsSugianto BarusPas encore d'évaluation
- Elect Machine Total 2012Document22 pagesElect Machine Total 2012NGOUNEPas encore d'évaluation
- 45 - Turbine-Governor ModelDocument13 pages45 - Turbine-Governor Modelkomiks0609Pas encore d'évaluation
- Ecuaciones para Curva de Conductores y MotoresDocument6 pagesEcuaciones para Curva de Conductores y MotoresCarlos Lovera Rodriguez100% (1)
- 1-Plant Control Design 27LH2V v7 0Document61 pages1-Plant Control Design 27LH2V v7 0TheVirus Papa100% (1)
- CSRH-Y Water Cooled Chiller - R134aDocument20 pagesCSRH-Y Water Cooled Chiller - R134antt_121987Pas encore d'évaluation
- Speed Control of DC Motor Using TriacDocument13 pagesSpeed Control of DC Motor Using TriacRajesh Reddy KakarlaPas encore d'évaluation
- Introduction To Atp - May 16 2011v8Document110 pagesIntroduction To Atp - May 16 2011v8karlTronxoPas encore d'évaluation
- Electrical Software Tools OverviewDocument20 pagesElectrical Software Tools OverviewPanom ParinyaPas encore d'évaluation
- 1-Cooling LoadDocument10 pages1-Cooling LoadJoão CavalcantiPas encore d'évaluation
- Why The Study of Breakdown Mechanism in Gaseous Dielectric Is Essential?Document16 pagesWhy The Study of Breakdown Mechanism in Gaseous Dielectric Is Essential?Md IbtidaPas encore d'évaluation
- EVMS Full Notes PDFDocument78 pagesEVMS Full Notes PDFNaveen DhanurajPas encore d'évaluation
- DetailsDocument1 pageDetailsAnjana SudarsananPas encore d'évaluation
- PID ControllerDocument10 pagesPID ControllerFarid HazwanPas encore d'évaluation
- Control Loop Feedback Mechanism Controller Control Systems Process Variable Setpoint Algorithm Proportional Integral Derivative HeuristicallyDocument1 pageControl Loop Feedback Mechanism Controller Control Systems Process Variable Setpoint Algorithm Proportional Integral Derivative HeuristicallymahasherryPas encore d'évaluation
- Faiz On Problems of Cultural Planning in Asia, PakistanDocument9 pagesFaiz On Problems of Cultural Planning in Asia, PakistanSajjad IdreesPas encore d'évaluation
- Virtual MouseDocument59 pagesVirtual MouseSajjad IdreesPas encore d'évaluation
- Lab File: Institute of Industrial Electronics EngineeringDocument3 pagesLab File: Institute of Industrial Electronics EngineeringSajjad IdreesPas encore d'évaluation
- Basic Antenna Theory: Department of Electronics and Communication EngineeringDocument30 pagesBasic Antenna Theory: Department of Electronics and Communication EngineeringSajjad IdreesPas encore d'évaluation
- Wireless Communication: Made By: Sajjad Idrees SEAT NO: IIEE-09032 First YearDocument16 pagesWireless Communication: Made By: Sajjad Idrees SEAT NO: IIEE-09032 First YearSajjad IdreesPas encore d'évaluation
- Suction Pile SpecDocument33 pagesSuction Pile Specriaz16shaik100% (1)
- Syllabus Mechanical Qaqc Course Sdlinc 9600162099Document3 pagesSyllabus Mechanical Qaqc Course Sdlinc 9600162099Sridurgha Lakshmi Inc SDLINC NDT QA QC INSTITUTE100% (3)
- Thermo Dyanmics 2Document2 pagesThermo Dyanmics 2xcalliber404Pas encore d'évaluation
- ZL-7901A en V2.6b PDFDocument8 pagesZL-7901A en V2.6b PDFElio Jose Burgos Brieva100% (1)
- International - VT365 (2002-06)Document6 pagesInternational - VT365 (2002-06)Gerard RamPas encore d'évaluation
- Mission Centrifugal PumpsDocument60 pagesMission Centrifugal PumpsWell Site Ranger100% (2)
- Block Die Positioning and Pre-ProcessingDocument18 pagesBlock Die Positioning and Pre-ProcessingAndres CaizaPas encore d'évaluation
- ME302: Materials Mechanics: Chap. 1 StressDocument16 pagesME302: Materials Mechanics: Chap. 1 StressMat MatttPas encore d'évaluation
- Engine Manual of WeichaiDocument121 pagesEngine Manual of Weichaizein zee100% (9)
- Function: Torque-Induced Gyroscopic Precession Heading Indicators or Directional GyrosDocument2 pagesFunction: Torque-Induced Gyroscopic Precession Heading Indicators or Directional GyrosVicePas encore d'évaluation
- Thermodynamics: AllenDocument9 pagesThermodynamics: AllenronakPas encore d'évaluation
- MD 1Document2 pagesMD 1joshuaPas encore d'évaluation
- Mindman MVSC-300 Solenoid ValveDocument3 pagesMindman MVSC-300 Solenoid ValvecoronaqcPas encore d'évaluation
- Liquid Limit Arugolanu 1Document3 pagesLiquid Limit Arugolanu 1Durga Rama Swamy KalvakolanuPas encore d'évaluation
- Motorcycle CatalogDocument24 pagesMotorcycle CatalogCarsten JakobsenPas encore d'évaluation
- Moment VectorDocument9 pagesMoment VectorGlen GulayPas encore d'évaluation
- Den Co Close Control Product GuideDocument40 pagesDen Co Close Control Product GuideJarwantoPas encore d'évaluation
- XTRACT Calculul Unui Perete de B.ADocument1 pageXTRACT Calculul Unui Perete de B.AHDu13Pas encore d'évaluation
- Repair Manual ZF 63 Iv - ZF 80 Iv - ZF 80-1 Iv - ZF 85 IV Code 310.01.0009hDocument110 pagesRepair Manual ZF 63 Iv - ZF 80 Iv - ZF 80-1 Iv - ZF 85 IV Code 310.01.0009hEdwin Enrique OsorioPas encore d'évaluation
- LAB 2: Air Recirculation Through A Duct-Room System: Description of ApparatusDocument7 pagesLAB 2: Air Recirculation Through A Duct-Room System: Description of Apparatusp_sudheersharma100% (3)
- PDDDocument33 pagesPDDDamotharan Sathesh KumarPas encore d'évaluation
- Welding Symbols and NomenclatureDocument17 pagesWelding Symbols and Nomenclaturesa saPas encore d'évaluation
- TacheuchiTB1140 S51400007 - ServiceDocument652 pagesTacheuchiTB1140 S51400007 - ServiceStelian CrisanPas encore d'évaluation
- PROBLEM 17.137: SolutionDocument7 pagesPROBLEM 17.137: SolutiontaPas encore d'évaluation
- AEBS LDW 01 06eDocument42 pagesAEBS LDW 01 06eSailohithPas encore d'évaluation
- AssignmentME LawDocument2 pagesAssignmentME LawMatthew AquinoPas encore d'évaluation
- Flat Wakaf Mek Zainab P1Document1 pageFlat Wakaf Mek Zainab P1Nur NaziraPas encore d'évaluation
- Building Utilities Reviewer ComprehensiveDocument3 pagesBuilding Utilities Reviewer ComprehensiveReynald HarrisPas encore d'évaluation
- Estimation TCI Sanmar - EDC Vent Condenser Tag No E-102Document5 pagesEstimation TCI Sanmar - EDC Vent Condenser Tag No E-102Raviraj Shashikant PatilPas encore d'évaluation
- Owner's Manual For Porsgrunn Rotary Vane Steering Gear S-1995Document124 pagesOwner's Manual For Porsgrunn Rotary Vane Steering Gear S-1995O olezhaod100% (4)