Vous aimerez peut-être aussi
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (120)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- 7.6 Branch and Bound Method: C 1 1 0 0 0 Basic Variables Basic Basic Variables X X S S S Coefficient Variables ValuesDocument8 pages7.6 Branch and Bound Method: C 1 1 0 0 0 Basic Variables Basic Basic Variables X X S S S Coefficient Variables ValuesKowsalyaPas encore d'évaluation
- ShipDocument5 pagesShipTryj1Pas encore d'évaluation
- Governor Limit in SalesforceDocument3 pagesGovernor Limit in SalesforceSantpa TechnologiesPas encore d'évaluation
- Contingency Ranking and Analysis Using Power System AnalysisDocument5 pagesContingency Ranking and Analysis Using Power System AnalysisVenkatesh PeruthambiPas encore d'évaluation
- Project Invention in ChsDocument5 pagesProject Invention in ChsMelanie Daclan AntepasadoPas encore d'évaluation
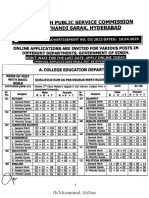
- 1000+ Education, Police & Anti Corruption Jobs Through SPSCDocument12 pages1000+ Education, Police & Anti Corruption Jobs Through SPSCZahid AliPas encore d'évaluation
- Alienware 17 R4 Service Manual: Computer Model: Alienware 17 R4 Regulatory Model: P31E Regulatory Type: P31E001Document133 pagesAlienware 17 R4 Service Manual: Computer Model: Alienware 17 R4 Regulatory Model: P31E Regulatory Type: P31E001Diki Fernando SaputraPas encore d'évaluation
- Dell PowerEdge R620 Spec SheetDocument2 pagesDell PowerEdge R620 Spec SheetRosli YusoffPas encore d'évaluation
- Netsuite GlossaryDocument42 pagesNetsuite Glossarymiguel barrosPas encore d'évaluation
- Hexadecimal Conversion Table Midi Channel Table: CC Chan. CC Chan. CC Chan. CCDocument1 pageHexadecimal Conversion Table Midi Channel Table: CC Chan. CC Chan. CC Chan. CCFernandoEscobedoBernuyPas encore d'évaluation
- 1.master Dug Hardware Failure:: Configure One of Slave Dugs As A Master. Not Doing So, Increases TheDocument2 pages1.master Dug Hardware Failure:: Configure One of Slave Dugs As A Master. Not Doing So, Increases TheDave100% (1)
- Vdocuments - MX Rotalign Ultra System ManualDocument31 pagesVdocuments - MX Rotalign Ultra System ManualTanPas encore d'évaluation
- CAN BUS Steering Gear ControlDocument7 pagesCAN BUS Steering Gear ControlsithulibraPas encore d'évaluation
- Safelink Enrollment FormDocument2 pagesSafelink Enrollment FormSet UpPas encore d'évaluation
- Condocs Numbering SystemDocument0 pageCondocs Numbering SystemEhtisham HaiderPas encore d'évaluation
- Electronics and Communication Engineering: Projectbased Lab Report OnDocument21 pagesElectronics and Communication Engineering: Projectbased Lab Report OnGowtham RoxtaPas encore d'évaluation
- JUMO mTRON T - Your System: The Scalable Measuring, Control and Automation SystemDocument33 pagesJUMO mTRON T - Your System: The Scalable Measuring, Control and Automation SystemJaime HernandezPas encore d'évaluation
- FDL-3 BOM Auto TailDocument2 pagesFDL-3 BOM Auto TailRafael ReisPas encore d'évaluation
- 50+ Data Analysis Projects With Python by Aman Kharwal MediumDocument12 pages50+ Data Analysis Projects With Python by Aman Kharwal Mediumpradito_bhimoPas encore d'évaluation
- Integrated XML Gateway Implementation GuideDocument142 pagesIntegrated XML Gateway Implementation GuideManu K BhagavathPas encore d'évaluation
- 5.CASA LabDocument6 pages5.CASA LabsathishPas encore d'évaluation
- Creators2 Lesson7 3rdeditionDocument27 pagesCreators2 Lesson7 3rdeditionLace CabatoPas encore d'évaluation
- Forcing A Connection Procedure (Franchises)Document5 pagesForcing A Connection Procedure (Franchises)Erick Hernandez SanchezPas encore d'évaluation
- Skybox Security Best Practices Migrating Next-Gen Firewalls EN PDFDocument3 pagesSkybox Security Best Practices Migrating Next-Gen Firewalls EN PDFsysdhanabalPas encore d'évaluation
- VLT FC 301 - 302 AddendumDocument30 pagesVLT FC 301 - 302 AddendumRoneiPas encore d'évaluation
- Display Static Parameters of Cells-2Document6 804 pagesDisplay Static Parameters of Cells-2Fayed GamalPas encore d'évaluation
- 6762792 (1)Document2 pages6762792 (1)BenjaPas encore d'évaluation
- Forex InsiderDocument17 pagesForex InsiderLewis LowPas encore d'évaluation
- Safetica Professional ServicesDocument6 pagesSafetica Professional ServicesMing LePas encore d'évaluation
- Anguttaranikaya 5Document437 pagesAnguttaranikaya 5Hansi ZhaiPas encore d'évaluation