Vous aimerez peut-être aussi
- Consideration About Elastic Couplings Modeled in CATIA, BUTNARIU SilviuDocument5 pagesConsideration About Elastic Couplings Modeled in CATIA, BUTNARIU SilviuRipanu Marius IonutPas encore d'évaluation
- Brushless DC MotorDocument11 pagesBrushless DC MotorSek PyroPas encore d'évaluation
- Finite Element Analysis of A Synchronous Permanent Magnet Micromotor Through Axisymmetric and Transverse Planar SimulationsDocument4 pagesFinite Element Analysis of A Synchronous Permanent Magnet Micromotor Through Axisymmetric and Transverse Planar Simulationsarnika33Pas encore d'évaluation
- Design of Deployment Mechanism of Solar Array On A Small SatelliteDocument7 pagesDesign of Deployment Mechanism of Solar Array On A Small Satellitesaadajmalsultan23Pas encore d'évaluation
- Finite Element Model For Spot Welds Using Multi-Point Constraints and Its Dynamic CharacteristicsDocument9 pagesFinite Element Model For Spot Welds Using Multi-Point Constraints and Its Dynamic Characteristicssumatrablackcoffee453Pas encore d'évaluation
- Design and Analysis of Composite Structures for Automotive Applications: Chassis and DrivetrainD'EverandDesign and Analysis of Composite Structures for Automotive Applications: Chassis and DrivetrainPas encore d'évaluation
- Splines and SerrationsDocument6 pagesSplines and SerrationsMikel1020Pas encore d'évaluation
- An Efficient Approach For Cogging Torque Analysis of Motors With Three-Dimensional Flux DistributionDocument3 pagesAn Efficient Approach For Cogging Torque Analysis of Motors With Three-Dimensional Flux DistributionDeni Shidqi KhaerudiniPas encore d'évaluation
- 2003 Design of A New Axial Flux Permanent Magnet Generator For Hybrid Electric VehiclesDocument5 pages2003 Design of A New Axial Flux Permanent Magnet Generator For Hybrid Electric VehiclesFazal Karim MahsudPas encore d'évaluation
- Introductory Tutorial: Solidworks Motion and Finite Element Analysis (Fea) SimulationDocument12 pagesIntroductory Tutorial: Solidworks Motion and Finite Element Analysis (Fea) SimulationMWFirmansyahPas encore d'évaluation
- 3-D Stress Analysis Generator Rotor Styudy PDFDocument24 pages3-D Stress Analysis Generator Rotor Styudy PDFdkymqPas encore d'évaluation
- Analysis of Rolling Contact Fatigue Damage Initiation at The Wheel-Rail InterfaceDocument9 pagesAnalysis of Rolling Contact Fatigue Damage Initiation at The Wheel-Rail InterfaceVicky MtsPas encore d'évaluation
- Mechanical Analysis of Crossbeam in A Gantry Machine Tool and Its Deformation CompensationDocument6 pagesMechanical Analysis of Crossbeam in A Gantry Machine Tool and Its Deformation CompensationTrâm Anh NguyenPas encore d'évaluation
- Ebrahim I 2000Document13 pagesEbrahim I 2000namPas encore d'évaluation
- ANSYS Analysis of Single Phase Induction Motor - Hani Aziz AmeenDocument74 pagesANSYS Analysis of Single Phase Induction Motor - Hani Aziz AmeenHani Aziz Ameen50% (2)
- Shape Memory Alloy Actuators: Design, Fabrication, and Experimental EvaluationD'EverandShape Memory Alloy Actuators: Design, Fabrication, and Experimental EvaluationPas encore d'évaluation
- Naf Ems 2013 RotorDocument12 pagesNaf Ems 2013 Rotorletter_ashish4444Pas encore d'évaluation
- Hiroaki HOSHINO - Simulation On Synchronization MechanismDocument8 pagesHiroaki HOSHINO - Simulation On Synchronization Mechanismelah1Pas encore d'évaluation
- VV FE Study Bridge Deck DesignDocument22 pagesVV FE Study Bridge Deck DesignMahfuzur RahmanPas encore d'évaluation
- The Optimal Design of Three Degree-of-Freedom Parallel Mechanisms For Machining ApplicationsDocument9 pagesThe Optimal Design of Three Degree-of-Freedom Parallel Mechanisms For Machining ApplicationsBignaturalPas encore d'évaluation
- Analysis of Fatigue Characteristics of Gears Based On Ncode DesignlifeDocument6 pagesAnalysis of Fatigue Characteristics of Gears Based On Ncode DesignlifeTUTUPas encore d'évaluation
- Tutorial Tzu-Yu WuDocument12 pagesTutorial Tzu-Yu WuIonut-Catalin DimachePas encore d'évaluation
- Jaw CouplingDocument18 pagesJaw CouplingsalesPas encore d'évaluation
- A Curved-Beam Bistable Mechanism: Jin Qiu, Jeffrey H. Lang, Fellow, IEEE, and Alexander H. Slocum, Member, IEEEDocument10 pagesA Curved-Beam Bistable Mechanism: Jin Qiu, Jeffrey H. Lang, Fellow, IEEE, and Alexander H. Slocum, Member, IEEEM.J.W.100% (1)
- The Optimal Design of Three Degree-of-Freedom Parallel Mechanisms For Machining ApplicationsDocument6 pagesThe Optimal Design of Three Degree-of-Freedom Parallel Mechanisms For Machining ApplicationsmiguelrlzPas encore d'évaluation
- Damage Factor Estimation of Crane-Hook (A Database Approach With Image, Knowledge and Simulation)Document14 pagesDamage Factor Estimation of Crane-Hook (A Database Approach With Image, Knowledge and Simulation)Rogers PalamattamPas encore d'évaluation
- Cao 2012Document6 pagesCao 2012amirbakhtiary97Pas encore d'évaluation
- Practical Induction 01Document5 pagesPractical Induction 01sathishPas encore d'évaluation
- Axial Turbine FEADocument8 pagesAxial Turbine FEAcena3135Pas encore d'évaluation
- Mathematical Modeling of Wheeled Mobile Robots: KeywordsDocument5 pagesMathematical Modeling of Wheeled Mobile Robots: KeywordsRaviPas encore d'évaluation
- TruptiDocument7 pagesTruptidebanshushekharPas encore d'évaluation
- Permanent Magnet Linear Transverse Flux MotorsDocument6 pagesPermanent Magnet Linear Transverse Flux Motorsarnika33Pas encore d'évaluation
- Model Updating and Validation of A Dual-Rotor System: H. Miao, C. Zang, M. FriswellDocument16 pagesModel Updating and Validation of A Dual-Rotor System: H. Miao, C. Zang, M. FriswellPhuor TyPas encore d'évaluation
- 3D-Multi Body Simulation of Wind Turbines With Flexible ComponentsDocument4 pages3D-Multi Body Simulation of Wind Turbines With Flexible ComponentsJesus MamaniPas encore d'évaluation
- Rad GP FU 2004Document16 pagesRad GP FU 2004scribdpgoranPas encore d'évaluation
- Till Ema 02 ValidationDocument10 pagesTill Ema 02 Validationuamiranda3518Pas encore d'évaluation
- Dynamic Damage and FragmentationD'EverandDynamic Damage and FragmentationDavid Edward LambertPas encore d'évaluation
- CYPE CONNECT-Calculations Report PDFDocument16 pagesCYPE CONNECT-Calculations Report PDFAHMAD BALFAQIHPas encore d'évaluation
- 3d Transient With Motion Simulation of Electric MotorsDocument3 pages3d Transient With Motion Simulation of Electric MotorsjalilemadiPas encore d'évaluation
- About The Preliminary Design of The Suspension SPRDocument7 pagesAbout The Preliminary Design of The Suspension SPRalinPas encore d'évaluation
- 7 TransformadorDocument27 pages7 TransformadorMarkovic Ávila MartínezPas encore d'évaluation
- CAD Project 05 Report FinalDocument52 pagesCAD Project 05 Report Finalsidhant_rockPas encore d'évaluation
- Toshiaki Nakagawa, First Order Analysis For Automotive Body Structure Design - Part 4 Noise and Vibration Analysis Applied To A SubframeDocument10 pagesToshiaki Nakagawa, First Order Analysis For Automotive Body Structure Design - Part 4 Noise and Vibration Analysis Applied To A SubframeLiyana 리야나 RoslanPas encore d'évaluation
- Thesis On Fretting Fatigue in Railway AxlesDocument6 pagesThesis On Fretting Fatigue in Railway Axlespamelasmithlittlerock100% (2)
- 3IJMPERDAPR20193Document18 pages3IJMPERDAPR20193TJPRC PublicationsPas encore d'évaluation
- Xu (2018) - Finite Element Analysis of Hook Structure Based On Autodesk SimulationDocument4 pagesXu (2018) - Finite Element Analysis of Hook Structure Based On Autodesk SimulationGogyPas encore d'évaluation
- Computation of Additional Losses Due To Rotoreccentricity in Electrical MachinesDocument8 pagesComputation of Additional Losses Due To Rotoreccentricity in Electrical Machinesafru2000Pas encore d'évaluation
- MECH3403 Assignment 1 Report FINALDocument16 pagesMECH3403 Assignment 1 Report FINALCong Thanh LePas encore d'évaluation
- 3-D Modelling AND Finite Element Analysis OF EOT Crane: Abhinay Suratkar, Vishal ShuklaDocument4 pages3-D Modelling AND Finite Element Analysis OF EOT Crane: Abhinay Suratkar, Vishal ShuklaNaresh DesaiPas encore d'évaluation
- Rotordynamic Characteristics Analysis For An AeroDocument7 pagesRotordynamic Characteristics Analysis For An AeroyunusPas encore d'évaluation
- Analysis of Axial Flux MotorDocument4 pagesAnalysis of Axial Flux MotorAvi GuptaPas encore d'évaluation
- Cable Bowden Actuator Force FeddbackDocument6 pagesCable Bowden Actuator Force FeddbackAb Imō PectorePas encore d'évaluation
- Hinterberger SCC2009 PDFDocument14 pagesHinterberger SCC2009 PDFKalpesh JoshiPas encore d'évaluation
- Materials Science and Technology of Optical FabricationD'EverandMaterials Science and Technology of Optical FabricationPas encore d'évaluation
- Finite Element Modelling Ball Screw Feed Drive SystemsDocument4 pagesFinite Element Modelling Ball Screw Feed Drive SystemsnPas encore d'évaluation
- Detc2002/mech 34231Document10 pagesDetc2002/mech 34231kaesarPas encore d'évaluation
- JMSS 2 4 2010 PDFDocument10 pagesJMSS 2 4 2010 PDFCafer BalPas encore d'évaluation
- Chassis AnalysisDocument11 pagesChassis AnalysisDaani OloraPas encore d'évaluation
- A Study On The Dynamic Behaviour of Lightweight GeDocument13 pagesA Study On The Dynamic Behaviour of Lightweight GeOmair Nisar KhanPas encore d'évaluation
- 3.1 MuazuDocument8 pages3.1 MuazuMon CastrPas encore d'évaluation
- DAB Submersible PumpsDocument24 pagesDAB Submersible PumpsMohamed MamdouhPas encore d'évaluation
- Integration Plan Grade 9 Mapeh SeptemberDocument3 pagesIntegration Plan Grade 9 Mapeh Septemberbernie evaristo bacsaPas encore d'évaluation
- SL 4001Document2 pagesSL 4001ardiPas encore d'évaluation
- Pursuit of Performance Findings From The 2014 Miller Heiman Sales Best Practices StudyDocument37 pagesPursuit of Performance Findings From The 2014 Miller Heiman Sales Best Practices StudyLoredanaPas encore d'évaluation
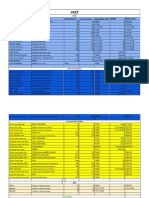
- Jazz PrepaidDocument4 pagesJazz PrepaidHoney BunnyPas encore d'évaluation
- Bug Life Cycle in Software TestingDocument2 pagesBug Life Cycle in Software TestingDhirajPas encore d'évaluation
- Dimmable Bulbs SamplesDocument11 pagesDimmable Bulbs SamplesBOSS BalaPas encore d'évaluation
- AB-005-2020 Dated 10.09.2020 (SKF-Prestine)Document3 pagesAB-005-2020 Dated 10.09.2020 (SKF-Prestine)AliasgarPas encore d'évaluation
- SKF CMSS2200 PDFDocument2 pagesSKF CMSS2200 PDFSANTIAGOPas encore d'évaluation
- VPZ M BrochureDocument2 pagesVPZ M BrochuresundyaPas encore d'évaluation
- Concrete Lab ManualDocument20 pagesConcrete Lab ManualkelmazodroPas encore d'évaluation
- AnimDessin2 User Guide 01Document2 pagesAnimDessin2 User Guide 01rendermanuser100% (1)
- Warning: Shaded Answers Without Corresponding Solution Will Incur Deductive PointsDocument1 pageWarning: Shaded Answers Without Corresponding Solution Will Incur Deductive PointsKhiara Claudine EspinosaPas encore d'évaluation
- Catálogo StaubliDocument8 pagesCatálogo StaubliJackson BravosPas encore d'évaluation
- Soil Liquefaction Analysis of Banasree Residential Area, Dhaka Using NovoliqDocument7 pagesSoil Liquefaction Analysis of Banasree Residential Area, Dhaka Using NovoliqPicasso DebnathPas encore d'évaluation
- Lab Final SolutionDocument18 pagesLab Final SolutionZeePas encore d'évaluation
- Chapter 07Document16 pagesChapter 07Elmarie RecorbaPas encore d'évaluation
- PhotometryDocument2 pagesPhotometryHugo WPas encore d'évaluation
- Classroom Debate Rubric Criteria 5 Points 4 Points 3 Points 2 Points 1 Point Total PointsDocument1 pageClassroom Debate Rubric Criteria 5 Points 4 Points 3 Points 2 Points 1 Point Total PointsKael PenalesPas encore d'évaluation
- Marketing Plan Outline-Fall 23Document6 pagesMarketing Plan Outline-Fall 23arbelsb3Pas encore d'évaluation
- Slip Ring Motor CheckDocument3 pagesSlip Ring Motor CheckRolando LoayzaPas encore d'évaluation
- Tourism PlanningDocument36 pagesTourism PlanningAvegael Tonido Rotugal100% (1)
- Torrent - WSCC - Windows System Control Center 7.0.5.7 Commercial (x64 x86) - TeamOS - Team OS - Your Only Destination To Custom OS !!Document5 pagesTorrent - WSCC - Windows System Control Center 7.0.5.7 Commercial (x64 x86) - TeamOS - Team OS - Your Only Destination To Custom OS !!moustafaPas encore d'évaluation
- Proposed Multimodal Terminal: Architect Rosauro H. Jamandri, M. ArchDocument7 pagesProposed Multimodal Terminal: Architect Rosauro H. Jamandri, M. Archpepito manalotoPas encore d'évaluation
- SHAW Superdew 3 Specification SheetDocument3 pagesSHAW Superdew 3 Specification SheetGeetha ManoharPas encore d'évaluation
- A Guide To Sample Size For Animal-Based Studies (VetBooks - Ir)Document292 pagesA Guide To Sample Size For Animal-Based Studies (VetBooks - Ir)Jonathan MannPas encore d'évaluation
- Sim Educ101Document101 pagesSim Educ101Rolando AmadPas encore d'évaluation
- Sai Deepa Rock Drills: Unless Otherwise Specified ToleranceDocument1 pageSai Deepa Rock Drills: Unless Otherwise Specified ToleranceRavi BabaladiPas encore d'évaluation
- Num Sheet 1Document1 pageNum Sheet 1Abinash MohantyPas encore d'évaluation