Vous aimerez peut-être aussi
- CG2027 - Assign - 2 - SolutionDocument2 pagesCG2027 - Assign - 2 - SolutionPeng FeiPas encore d'évaluation
- SEM N TEM in Polymer CharacterizationDocument25 pagesSEM N TEM in Polymer CharacterizationNabihah AbdullahPas encore d'évaluation
- GA Catalogue CA 500 GB 0501Document36 pagesGA Catalogue CA 500 GB 0501adst34Pas encore d'évaluation
- RainBird AutoCAD LegendDocument3 pagesRainBird AutoCAD LegendFlop ArghPas encore d'évaluation
- HDLC and PPP Protocols ExplainedDocument28 pagesHDLC and PPP Protocols ExplainedToàn VũPas encore d'évaluation
- TS-2000 (B510-01-005) UT-20 InstallationDocument6 pagesTS-2000 (B510-01-005) UT-20 Installationbackup mailPas encore d'évaluation
- Beam Modifiers in RadiotherapyDocument26 pagesBeam Modifiers in RadiotherapyHirak BandyopadhyayPas encore d'évaluation
- Bidirectional Flyback Inverter WithDocument5 pagesBidirectional Flyback Inverter WithArceu CamposPas encore d'évaluation
- InGaAs LDMOS Power TransistorsDocument13 pagesInGaAs LDMOS Power TransistorsMamidala Jagadesh KumarPas encore d'évaluation
- Pe - Chapter 4 PDFDocument87 pagesPe - Chapter 4 PDFTrong Hieu DoanPas encore d'évaluation
- Digital IC Design Lab v1p0 20170324 PDFDocument68 pagesDigital IC Design Lab v1p0 20170324 PDFBộLạcPas encore d'évaluation
- IIR Filter Design Problems and SolutionsDocument21 pagesIIR Filter Design Problems and Solutionskhrid3100% (2)
- X-RAY DIFFRACTION TECHNIQUESDocument48 pagesX-RAY DIFFRACTION TECHNIQUESmethoxyPas encore d'évaluation
- Leach PDFDocument6 pagesLeach PDFNandiniManinarayanaPas encore d'évaluation
- Es35 SW BrochureDocument4 pagesEs35 SW BrochureThái Trung TàiPas encore d'évaluation
- What is a Shockley diodeDocument6 pagesWhat is a Shockley diodeHaries GarciaPas encore d'évaluation
- EMSY435664-He Thong NhungDocument6 pagesEMSY435664-He Thong NhungDanh QuânPas encore d'évaluation
- MOSFET Constant Current DriverDocument4 pagesMOSFET Constant Current DriverdragoblaztrPas encore d'évaluation
- Catalogue - DC Dien - HemDocument8 pagesCatalogue - DC Dien - HemLuong Tam ThinhPas encore d'évaluation
- p1512 eDocument4 pagesp1512 eJavier Augusto ReyesPas encore d'évaluation
- Datasheet LCD 20x4Document16 pagesDatasheet LCD 20x4Gaston_77100% (1)
- Machine Elements Gear Drive AnalysisDocument6 pagesMachine Elements Gear Drive Analysiszangue billy jamesPas encore d'évaluation
- Predator Prey ModelDocument11 pagesPredator Prey ModelHiren PatelPas encore d'évaluation
- Bipolar Junction Question and Answer 2Document53 pagesBipolar Junction Question and Answer 2S MarwatPas encore d'évaluation
- Introduction To Electro-OpticsDocument34 pagesIntroduction To Electro-OpticspraadiitaaPas encore d'évaluation
- Final Exam 2021.1 For Technical Writing and Presentation: Date Submit in Class On The Day of Multiple-Choice ExamDocument2 pagesFinal Exam 2021.1 For Technical Writing and Presentation: Date Submit in Class On The Day of Multiple-Choice ExamKhoa ĐTTT Nguyễn Tiến HòaPas encore d'évaluation
- MOS II - TUTORIAL SHEET Week 4 PDFDocument2 pagesMOS II - TUTORIAL SHEET Week 4 PDFShirishaVijayapuramPas encore d'évaluation
- Robust Fast Terminal SMC With Prescribed Performance For A Wearable Exoskeleton RobotDocument6 pagesRobust Fast Terminal SMC With Prescribed Performance For A Wearable Exoskeleton Robotabdelhamid.ghoul93Pas encore d'évaluation
- VLSI Design Mid 2Document3 pagesVLSI Design Mid 2mohanPas encore d'évaluation
- (BS 1041-5-1989) - Temperature Measurement. Guide To Selection and Use of Radiation Pyrometers PDFDocument42 pages(BS 1041-5-1989) - Temperature Measurement. Guide To Selection and Use of Radiation Pyrometers PDFAnonymous Y833nLdDPas encore d'évaluation
- ECE 437 Power Electronics: SVPWM Inverter SimulationDocument27 pagesECE 437 Power Electronics: SVPWM Inverter Simulationkhaled99Pas encore d'évaluation
- 2016 Ch1-Intro PDFDocument16 pages2016 Ch1-Intro PDFTrần Anh TânPas encore d'évaluation
- CG2027 Assign3Document2 pagesCG2027 Assign3clement hungPas encore d'évaluation
- Fuzzy PID Control With Type-2 FIS - MATLAB & Simulink PDFDocument11 pagesFuzzy PID Control With Type-2 FIS - MATLAB & Simulink PDFManuel DelgadoPas encore d'évaluation
- Cohesive Energy of DiamondDocument6 pagesCohesive Energy of DiamondReinard DTPas encore d'évaluation
- Electrical Machines Question BankDocument5 pagesElectrical Machines Question BankLohanathan VkPas encore d'évaluation
- Chapter Five: Inimization of OnductedDocument27 pagesChapter Five: Inimization of Onductedligrav007Pas encore d'évaluation
- Computer Vision Report1Document29 pagesComputer Vision Report1TanPas encore d'évaluation
- Damhccd Nguyen Thi QuangDocument84 pagesDamhccd Nguyen Thi QuangtayantrungquocPas encore d'évaluation
- Midterm rp - Nguyễn Phú Minh Nhật - 20202795Document1 pageMidterm rp - Nguyễn Phú Minh Nhật - 20202795Minh Nhật100% (1)
- Mini ProjectDocument8 pagesMini ProjectAzizul HadiPas encore d'évaluation
- SVPWM 3 LevelDocument27 pagesSVPWM 3 Levelthirumalai22Pas encore d'évaluation
- Nmos FabricationDocument45 pagesNmos FabricationDr-GopalPas encore d'évaluation
- Physics Experiment Circular MotionDocument10 pagesPhysics Experiment Circular MotionSubesh Shanmugam0% (1)
- Partial Molar PropertiesDocument6 pagesPartial Molar PropertiesNISHTHA PANDEYPas encore d'évaluation
- Final 222 2009 SolDocument6 pagesFinal 222 2009 SolNapsterPas encore d'évaluation
- Exp10 ESC Electron Specific ChargeDocument4 pagesExp10 ESC Electron Specific ChargeUtkarsh AgarwalPas encore d'évaluation
- Optimization of LDMOS TransistorDocument84 pagesOptimization of LDMOS TransistorLuís PaisPas encore d'évaluation
- 4.plasma ReactorsDocument28 pages4.plasma Reactors湯晴羽Pas encore d'évaluation
- Speak B1.2Document5 pagesSpeak B1.2Xuân ThưPas encore d'évaluation
- English (Transistor) : Jurusan Teknik Elektro Program Studi D-Iv Teknik Elektronika Politeknik Negeri Malang 2019Document5 pagesEnglish (Transistor) : Jurusan Teknik Elektro Program Studi D-Iv Teknik Elektronika Politeknik Negeri Malang 2019Zulfikar Iannur AwwalPas encore d'évaluation
- Stepper Motor PDFDocument49 pagesStepper Motor PDFP HAMSA DATTAPas encore d'évaluation
- Chapter7 GSO5Document40 pagesChapter7 GSO5Lawson SangoPas encore d'évaluation
- IpbalanceDocument1 pageIpbalancephuceltnPas encore d'évaluation
- Sal Institute of Technology and Engineering Reserch Electrical DepartmentDocument1 pageSal Institute of Technology and Engineering Reserch Electrical DepartmentSachin ShikotraPas encore d'évaluation
- ZVZCS ConverterDocument7 pagesZVZCS ConverterefremofePas encore d'évaluation
- Lin 2013Document12 pagesLin 2013Pavan Singh TomarPas encore d'évaluation
- Synchronous RectificationDocument64 pagesSynchronous Rectificationramkrsingh1384Pas encore d'évaluation
- Resonant Converter Power Supply Design for Arc WeldingDocument5 pagesResonant Converter Power Supply Design for Arc Weldingshado2010Pas encore d'évaluation
- Single Phase Reduced Order Ac-Ac Resonant - Frequency ConverterDocument10 pagesSingle Phase Reduced Order Ac-Ac Resonant - Frequency ConverterIJAR JOURNALPas encore d'évaluation
- Line Losses in The 14-Bus Power System Network Using UPFCDocument6 pagesLine Losses in The 14-Bus Power System Network Using UPFCIDESPas encore d'évaluation
- 1010Document6 pages1010Wil LamPas encore d'évaluation
- Power System State Estimation - A ReviewDocument9 pagesPower System State Estimation - A ReviewIDESPas encore d'évaluation
- Study of Structural Behaviour of Gravity Dam With Various Features of Gallery by FEMDocument8 pagesStudy of Structural Behaviour of Gravity Dam With Various Features of Gallery by FEMIDESPas encore d'évaluation
- Design and Performance Analysis of Genetic Based PID-PSS With SVC in A Multi-Machine System Considering Detailed ModelDocument9 pagesDesign and Performance Analysis of Genetic Based PID-PSS With SVC in A Multi-Machine System Considering Detailed ModelIDESPas encore d'évaluation
- Various OSI Layer Attacks and Countermeasure To Enhance The Performance of WSNs During Wormhole AttackDocument6 pagesVarious OSI Layer Attacks and Countermeasure To Enhance The Performance of WSNs During Wormhole AttackIDESPas encore d'évaluation
- Secure Multi-Party Negotiation: An Analysis Forelectronic Payments in Mobile ComputingDocument8 pagesSecure Multi-Party Negotiation: An Analysis Forelectronic Payments in Mobile ComputingIDESPas encore d'évaluation
- Optimal Placement of DG For Loss Reduction and Voltage Sag Mitigation in Radial Distribution Systems Using ABC AlgorithmDocument6 pagesOptimal Placement of DG For Loss Reduction and Voltage Sag Mitigation in Radial Distribution Systems Using ABC AlgorithmIDESPas encore d'évaluation
- Responsive Parameter Based An AntiWorm Approach To Prevent Wormhole Attack in Ad Hoc NetworksDocument8 pagesResponsive Parameter Based An AntiWorm Approach To Prevent Wormhole Attack in Ad Hoc NetworksIDESPas encore d'évaluation
- Artificial Intelligence Technique Based Reactive Power Planning Incorporating FACTS Controllers in Real Time Power Transmission SystemDocument7 pagesArtificial Intelligence Technique Based Reactive Power Planning Incorporating FACTS Controllers in Real Time Power Transmission SystemIDESPas encore d'évaluation
- Selfish Node Isolation & Incentivation Using Progressive ThresholdsDocument8 pagesSelfish Node Isolation & Incentivation Using Progressive ThresholdsIDESPas encore d'évaluation
- Permutation of Pixels Within The Shares of Visual Cryptography Using KBRP For Enhanced SecurityDocument9 pagesPermutation of Pixels Within The Shares of Visual Cryptography Using KBRP For Enhanced SecurityIDESPas encore d'évaluation
- Cloud Security and Data Integrity With Client Accountability FrameworkDocument13 pagesCloud Security and Data Integrity With Client Accountability FrameworkIDESPas encore d'évaluation
- Comparative Study of Morphological, Correlation, Hybrid and DCSFPSS Based Morphological & Tribrid Algorithms For GFDDDocument10 pagesComparative Study of Morphological, Correlation, Hybrid and DCSFPSS Based Morphological & Tribrid Algorithms For GFDDIDESPas encore d'évaluation
- Enhancing Data Storage Security in Cloud Computing Through SteganographyDocument7 pagesEnhancing Data Storage Security in Cloud Computing Through SteganographyIDESPas encore d'évaluation
- Low Energy Routing For WSN'sDocument4 pagesLow Energy Routing For WSN'sIDESPas encore d'évaluation
- High Density Salt and Pepper Impulse Noise RemovalDocument10 pagesHigh Density Salt and Pepper Impulse Noise RemovalIDESPas encore d'évaluation
- Genetic Algorithm Based Layered Detection and Defense of HTTP BotnetDocument12 pagesGenetic Algorithm Based Layered Detection and Defense of HTTP BotnetIDESPas encore d'évaluation
- Texture Unit Based Monocular Real-World Scene Classification Using SOM and KNN ClassifierDocument8 pagesTexture Unit Based Monocular Real-World Scene Classification Using SOM and KNN ClassifierIDESPas encore d'évaluation
- Band Clustering For The Lossless Compression of AVIRIS Hyperspectral ImagesDocument14 pagesBand Clustering For The Lossless Compression of AVIRIS Hyperspectral ImagesIDESPas encore d'évaluation
- Rotman Lens Performance AnalysisDocument6 pagesRotman Lens Performance AnalysisIDESPas encore d'évaluation
- Optimized Neural Network For Classification of Multispectral ImagesDocument6 pagesOptimized Neural Network For Classification of Multispectral ImagesIDESPas encore d'évaluation
- Blind Source Separation of Super and Sub-Gaussian Signals With ABC AlgorithmDocument10 pagesBlind Source Separation of Super and Sub-Gaussian Signals With ABC AlgorithmIDESPas encore d'évaluation
- Microelectronic Circuit Analogous To Hydrogen Bonding Network in Active Site of - LactamaseDocument8 pagesMicroelectronic Circuit Analogous To Hydrogen Bonding Network in Active Site of - LactamaseIDESPas encore d'évaluation
- Mental Stress Evaluation Using An Adaptive ModelDocument8 pagesMental Stress Evaluation Using An Adaptive ModelIDESPas encore d'évaluation
- 3-D FFT Moving Object Signatures For Velocity FilteringDocument5 pages3-D FFT Moving Object Signatures For Velocity FilteringIDESPas encore d'évaluation
- Genetic Algorithm Based Mosaic Image Steganography For Enhanced SecurityDocument12 pagesGenetic Algorithm Based Mosaic Image Steganography For Enhanced SecurityIDESPas encore d'évaluation
- Efficient Architecture For Variable Block Size Motion Estimation in H.264/AVCDocument9 pagesEfficient Architecture For Variable Block Size Motion Estimation in H.264/AVCIDESPas encore d'évaluation
- Opportunities and Challenges of Software CustomizationDocument11 pagesOpportunities and Challenges of Software CustomizationIDESPas encore d'évaluation
- Ontology-Based Semantic Approach For Learning Object RecommendationDocument10 pagesOntology-Based Semantic Approach For Learning Object RecommendationIDESPas encore d'évaluation
- 85 87 Radcom Mar05Document3 pages85 87 Radcom Mar05Billy NoonPas encore d'évaluation
- S2PF380N65R: N-Channel 650V Enhancement Mode Power MOSFETDocument8 pagesS2PF380N65R: N-Channel 650V Enhancement Mode Power MOSFETMaikel Borges IglesiasPas encore d'évaluation
- Sharma ResistorsDocument6 pagesSharma ResistorsBob TaymanPas encore d'évaluation
- L Series Catalog Page PDFDocument22 pagesL Series Catalog Page PDFMiulenPas encore d'évaluation
- 6.5 Electrical Characteristics: (T 25°C, V 5 V To 15 V, Unless Otherwise Specified)Document2 pages6.5 Electrical Characteristics: (T 25°C, V 5 V To 15 V, Unless Otherwise Specified)PC SmailPas encore d'évaluation
- Monitor Undervoltage with BA 9043 RelayDocument4 pagesMonitor Undervoltage with BA 9043 Relayhammad129Pas encore d'évaluation
- LG NeON® H BiFacial (440W-445W-450W)Document2 pagesLG NeON® H BiFacial (440W-445W-450W)Adrian GhermanPas encore d'évaluation
- Catalogo Siemens PararrayosDocument12 pagesCatalogo Siemens PararrayosFidel MorenoPas encore d'évaluation
- Questions On Electric Motors With AnswersDocument2 pagesQuestions On Electric Motors With Answersanil1216kumar100% (2)
- Product - Power Transformer - EN PDFDocument16 pagesProduct - Power Transformer - EN PDFMd Mustafijur Rahman TusharPas encore d'évaluation
- Z1 Clip Dec21Document7 pagesZ1 Clip Dec21Joaquin Escobar VillanuevaPas encore d'évaluation
- TD-1002b 9.6 Major Standards List Table 20 Major Standards ListDocument1 pageTD-1002b 9.6 Major Standards List Table 20 Major Standards ListNurul DhilaPas encore d'évaluation
- Geared DC Instrument Motor 1308 SeriesDocument1 pageGeared DC Instrument Motor 1308 SeriesIdehen KelvinPas encore d'évaluation
- Comparison GG Am Fuses EnuDocument2 pagesComparison GG Am Fuses EnuNaveed RabbaniPas encore d'évaluation
- TFC/U-JIN Coaxial Cable Spec SheetDocument1 pageTFC/U-JIN Coaxial Cable Spec SheetPrakash BhavsarPas encore d'évaluation
- How To Test A SolenoidDocument3 pagesHow To Test A SolenoidVyas SrinivasanPas encore d'évaluation
- TEJ HS1 Quiz Electricity Safety StudentDocument2 pagesTEJ HS1 Quiz Electricity Safety StudentZaw Htet MyintPas encore d'évaluation
- Torque Motors: 5 T K 20 GN - CW 2 EDocument8 pagesTorque Motors: 5 T K 20 GN - CW 2 ETowfiqur RahmanPas encore d'évaluation
- Course Teacher: Dr. Muhammad Mohsin Aman Course Code: EE-523 Venue: Computer Laboratory, Department of Electrical Engineering, NED University KarachiDocument56 pagesCourse Teacher: Dr. Muhammad Mohsin Aman Course Code: EE-523 Venue: Computer Laboratory, Department of Electrical Engineering, NED University KarachiNaveed RabbaniPas encore d'évaluation
- PDF Q1 Mod 1 EIM GRADE 12 NewDocument10 pagesPDF Q1 Mod 1 EIM GRADE 12 NewCloud DullasPas encore d'évaluation
- Voltage Monitoring Series SM 175Document7 pagesVoltage Monitoring Series SM 175sai kiranPas encore d'évaluation
- Schedule of Loads for 19-Unit DwellingDocument1 pageSchedule of Loads for 19-Unit Dwellingmichael jay juanPas encore d'évaluation
- LEARN ABOUT ELECTRICITY AND ITS KEY TERMSDocument30 pagesLEARN ABOUT ELECTRICITY AND ITS KEY TERMSAdrielle LadazzaPas encore d'évaluation
- FusesDocument50 pagesFusesJustine RenzPas encore d'évaluation
- FET Transistor Guide: Types, Operation and CharacteristicsDocument72 pagesFET Transistor Guide: Types, Operation and CharacteristicsOmar OdehPas encore d'évaluation
- Overcharge/Overdischarge/Overcurrent Safety Circuits: - The Functions of The Safety Circuits (Typical Functions)Document4 pagesOvercharge/Overdischarge/Overcurrent Safety Circuits: - The Functions of The Safety Circuits (Typical Functions)Mahir MahmoodPas encore d'évaluation
- Calibrating Dyn1 10794 Controllers for Stanadyne PumpsDocument4 pagesCalibrating Dyn1 10794 Controllers for Stanadyne PumpsGolbert GolbiPas encore d'évaluation
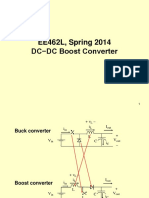
- DC DC Boost ConverterDocument21 pagesDC DC Boost Converterrokbraihan2Pas encore d'évaluation
- Galil BLM-N23-50-1000-BDocument2 pagesGalil BLM-N23-50-1000-BServo2GoPas encore d'évaluation