Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Femto Hybrid Paper ImproveDocument5 pagesFemto Hybrid Paper ImproveAnkit AgarwalPas encore d'évaluation
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Nokia ScholarshipDocument3 pagesNokia ScholarshipAnkit AgarwalPas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (894)
- PhD Scholarships for Non-EU Citizens at Mediterranean University of Reggio CalabriaDocument13 pagesPhD Scholarships for Non-EU Citizens at Mediterranean University of Reggio CalabriaAnkit AgarwalPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- PersonDocument1 pagePersonAnkit AgarwalPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Signal Processing Techniques For Software Radio: Behrouz Farhang-BoroujenyDocument7 pagesSignal Processing Techniques For Software Radio: Behrouz Farhang-BoroujenyAnkit AgarwalPas encore d'évaluation
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Higher Algebra - Hall & KnightDocument593 pagesHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Huawei ActixOne - 20110530-Use Case V3 PDFDocument66 pagesHuawei ActixOne - 20110530-Use Case V3 PDFFrensel PetronaPas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- What Is RTWP?: Statistics CategoriesDocument6 pagesWhat Is RTWP?: Statistics CategoriesOpeyemi DadaPas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- Thesis Proposal of LTE DimensioningDocument13 pagesThesis Proposal of LTE DimensioningGirma Abebe BPas encore d'évaluation
- D All Product Smartphone Y Series Y520-U22 HUAWEI Y520 Smart Phone Product Description V1.0Document15 pagesD All Product Smartphone Y Series Y520-U22 HUAWEI Y520 Smart Phone Product Description V1.0XXXXPas encore d'évaluation
- Agilent 8960 User ClubDocument61 pagesAgilent 8960 User ClubPrasanta Kumar SingPas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Wimax: Wi Max Navigation SearchDocument28 pagesWimax: Wi Max Navigation SearchMangesh GaykwadPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Inrouter 700 Series User'S Manual: Fifth Edition, August, 2011Document62 pagesInrouter 700 Series User'S Manual: Fifth Edition, August, 2011MARCOM SRLPas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Microsoft PowerPoint - 01 OEB004710 eNodeB LTE V100R006 Product Description ISSUE 1Document58 pagesMicrosoft PowerPoint - 01 OEB004710 eNodeB LTE V100R006 Product Description ISSUE 1javadiazPas encore d'évaluation
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- BTS or Node B RehomingDocument14 pagesBTS or Node B RehomingOhiwei OsawemenPas encore d'évaluation
- Star India V Piyush Agarwal and OrsDocument56 pagesStar India V Piyush Agarwal and OrsBar & BenchPas encore d'évaluation
- CelFi Repeater SpecificationsDocument2 pagesCelFi Repeater Specificationsbluebird1969Pas encore d'évaluation
- Mobile Network Architecture FundamentalsDocument47 pagesMobile Network Architecture FundamentalsIoniță Sorin CristianPas encore d'évaluation
- Max Br1 DatasheetDocument2 pagesMax Br1 Datasheetthed00medPas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- AMR Transmission Bandwidth Compression (RAN19.0 - Draft A)Document32 pagesAMR Transmission Bandwidth Compression (RAN19.0 - Draft A)AlbertPas encore d'évaluation
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- AllgonDocument52 pagesAllgonEvgeny VakhteevPas encore d'évaluation
- Iu Flex (RAN15.0 - 02)Document97 pagesIu Flex (RAN15.0 - 02)Firmansyah HermanaPas encore d'évaluation
- At CmndsDocument107 pagesAt CmndsNaveen VengaldasPas encore d'évaluation
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- World's Most Trusted Family of Handheld RF and Microwave AnalyzersDocument6 pagesWorld's Most Trusted Family of Handheld RF and Microwave AnalyzersTareq NadyPas encore d'évaluation
- LTE CELL Planning: Security LevelDocument31 pagesLTE CELL Planning: Security Levelwiwitraharjo100% (1)
- Dualband CombinerDocument24 pagesDualband CombinerCourtney HernandezPas encore d'évaluation
- Rel-10 Description 20120621Document154 pagesRel-10 Description 20120621Bhaskar KumarPas encore d'évaluation
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
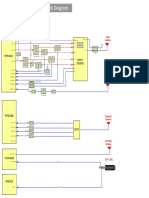
- L3 Block Diagram XT1063-XT1064-XT1068-XT1069 V1.0Document4 pagesL3 Block Diagram XT1063-XT1064-XT1068-XT1069 V1.0Renato AlmeidaPas encore d'évaluation
- PIM TrainingDocument71 pagesPIM TrainingAldrichPayponPas encore d'évaluation
- Geocell LTE Optimisation Plan v1Document31 pagesGeocell LTE Optimisation Plan v1Anonymous 56r2hICtlPas encore d'évaluation
- Introduction To Moshell Useful Commands and TasksDocument11 pagesIntroduction To Moshell Useful Commands and TasksPrabhat Kumar Singh100% (9)
- TP - RTT Calculation UMTSDocument11 pagesTP - RTT Calculation UMTSShahnawaz AnjumPas encore d'évaluation
- Aexio Xeus Pro 2012 Quick GuideDocument60 pagesAexio Xeus Pro 2012 Quick GuideShalua YonahPas encore d'évaluation
- UMTS: Origins, Architecture and The Standard: Pierre LescuyerDocument6 pagesUMTS: Origins, Architecture and The Standard: Pierre LescuyerTimeReversalPas encore d'évaluation
- Performance KPI's Optimization TipsDocument17 pagesPerformance KPI's Optimization TipsShekh Mohammad NasimPas encore d'évaluation
- Spectrum Control SystemDocument6 pagesSpectrum Control SystemToto DjadjamePas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)