Vous aimerez peut-être aussi
- RPallas Article 2004 2Document5 pagesRPallas Article 2004 2Christopher RoblesPas encore d'évaluation
- Zulu James Lab 1 4157Document7 pagesZulu James Lab 1 4157James Jimmy JahPas encore d'évaluation
- Impact of Variable Switching Frequency Over Power Loss On Converter TopologiesDocument6 pagesImpact of Variable Switching Frequency Over Power Loss On Converter TopologiesskrtamilPas encore d'évaluation
- Offset-Free Bidirectional Current Source For Impedance MeasurementDocument4 pagesOffset-Free Bidirectional Current Source For Impedance MeasurementHerman ToothrotPas encore d'évaluation
- Single Electron Based Binary Multipliers With Overflow DetectionDocument13 pagesSingle Electron Based Binary Multipliers With Overflow Detectionprabhjot singh1Pas encore d'évaluation
- Biomedicak instrumentation labDocument56 pagesBiomedicak instrumentation labMD. ASHIQUR RAHMAN 1602111Pas encore d'évaluation
- LAB # 10 DC Analysis of Differential Pair Amplifier With Common Mode SignalDocument8 pagesLAB # 10 DC Analysis of Differential Pair Amplifier With Common Mode SignalSaleh AhmedPas encore d'évaluation
- A 4.5mm2 Multimodal Biosensing SoC For PPG, ECG, BIOZ and GSR Acquisition in Consumer Wearable DevicesDocument3 pagesA 4.5mm2 Multimodal Biosensing SoC For PPG, ECG, BIOZ and GSR Acquisition in Consumer Wearable DevicesgetitabidPas encore d'évaluation
- Voltage Divider Circuit ExperimentDocument11 pagesVoltage Divider Circuit ExperimentLorshiel Anne TusingPas encore d'évaluation
- Pre-Lab Assignment: Read and Review Sections 2.4, 2.8.2, 9.9.3, 13.4, 13.5, and 13.9 inDocument11 pagesPre-Lab Assignment: Read and Review Sections 2.4, 2.8.2, 9.9.3, 13.4, 13.5, and 13.9 inThe_Dude1138Pas encore d'évaluation
- Laser Comm - ProjectDocument21 pagesLaser Comm - ProjectJaydeep SinhaPas encore d'évaluation
- Low Power Single Chip PstatDocument2 pagesLow Power Single Chip PstatKay ReimersPas encore d'évaluation
- 3-Phase PFC KolarDocument7 pages3-Phase PFC KolarJayant SalianPas encore d'évaluation
- Suppressing of Common-Mode Voltage, Shaft Voltage, Leakage Current and EMI Generated by Voltage Source PWM InverterDocument7 pagesSuppressing of Common-Mode Voltage, Shaft Voltage, Leakage Current and EMI Generated by Voltage Source PWM InverterFaissal RachmanPas encore d'évaluation
- C. Damian, C. Zet, I. Enculescu, R. Spohr: Virtual PotentiostatDocument5 pagesC. Damian, C. Zet, I. Enculescu, R. Spohr: Virtual Potentiostatnajam696Pas encore d'évaluation
- Local Media5941271462837301265Document65 pagesLocal Media5941271462837301265jason mr.perfect11Pas encore d'évaluation
- My PaperDocument6 pagesMy PaperCitharth MagendranPas encore d'évaluation
- Capacitance Adapter For Multimeter: (Document Subtitle)Document11 pagesCapacitance Adapter For Multimeter: (Document Subtitle)Kashif Hassan100% (1)
- Chapter 3Document10 pagesChapter 3Vikas UpadhyayPas encore d'évaluation
- bpw34 AvrDocument4 pagesbpw34 AvrNedim Avicena AlićPas encore d'évaluation
- Power Harvester Design For Semi-Passive UHF RFID Tag Using A Tunable Impedance TransformationDocument5 pagesPower Harvester Design For Semi-Passive UHF RFID Tag Using A Tunable Impedance TransformationM APas encore d'évaluation
- Circuit Design Techniques for Linear Integrated CircuitsDocument5 pagesCircuit Design Techniques for Linear Integrated CircuitsNoita EnolaPas encore d'évaluation
- High Frequency Modeling of Induction Motor Drives ForDocument7 pagesHigh Frequency Modeling of Induction Motor Drives ForIoan ŢileaPas encore d'évaluation
- GSM HarvesterDocument17 pagesGSM HarvesterSarah HeadPas encore d'évaluation
- Optical Fibre Line Current Measurement SystemDocument4 pagesOptical Fibre Line Current Measurement SystemVasu GuptaPas encore d'évaluation
- Soft Switched AC Link Buck Boost Converter TopologyDocument6 pagesSoft Switched AC Link Buck Boost Converter TopologyrigowPas encore d'évaluation
- EDN's Best of Design Ideas - Volume 1Document24 pagesEDN's Best of Design Ideas - Volume 1ableseaman100% (4)
- Opto Isolatr8Document8 pagesOpto Isolatr8bhaskarlxmPas encore d'évaluation
- Antenna Matching With EZNEC Version 5-Part1Document9 pagesAntenna Matching With EZNEC Version 5-Part1ALMTFPas encore d'évaluation
- A New High-Efficiency Single-Phase Transformerless PV Inverter TopologyDocument8 pagesA New High-Efficiency Single-Phase Transformerless PV Inverter TopologyMohamed SaidPas encore d'évaluation
- 01413552Document8 pages01413552Nalin Lochan GuptaPas encore d'évaluation
- LIC Question BankDocument7 pagesLIC Question BankParvathy S ParvathyPas encore d'évaluation
- IGBT: A Solid State SwitchDocument9 pagesIGBT: A Solid State Switchnagaraj p sPas encore d'évaluation
- Wireless Power Class-E OscillatorDocument5 pagesWireless Power Class-E OscillatorArohi SaxenaPas encore d'évaluation
- ENGG 166 Final HWDocument7 pagesENGG 166 Final HWRico BiggartPas encore d'évaluation
- Precision Constant Current Source For Electrical Impedance TomographyDocument5 pagesPrecision Constant Current Source For Electrical Impedance TomographyFitri PuspasariPas encore d'évaluation
- Modeling, Simulation and Reduction Techniques of Electromagnetic Conducted Emission Due To Operation of Power Electronic ConvertersDocument6 pagesModeling, Simulation and Reduction Techniques of Electromagnetic Conducted Emission Due To Operation of Power Electronic ConvertersskrtamilPas encore d'évaluation
- Understanding Power Impedance Supply For Optimum DecouplingDocument6 pagesUnderstanding Power Impedance Supply For Optimum Decouplingwillng001Pas encore d'évaluation
- EMI Problems Associated With DC-DC ConvertersDocument4 pagesEMI Problems Associated With DC-DC ConvertersAnonymous KhhapQJVYtPas encore d'évaluation
- A New Concept of Power Quality Monitoring: AbstractDocument6 pagesA New Concept of Power Quality Monitoring: AbstractlokvisPas encore d'évaluation
- Voltage Drop Describes How The SuppliedDocument4 pagesVoltage Drop Describes How The SuppliedrngwenaPas encore d'évaluation
- Opto Isolators Lesson 07-17-2012Document35 pagesOpto Isolators Lesson 07-17-2012whynot05Pas encore d'évaluation
- Potentiostat Fundamentals ExplainedDocument5 pagesPotentiostat Fundamentals ExplainedYousuf RazaPas encore d'évaluation
- A Novel Passive Filter To Reduce PWM Inverters Adverse Effects in Electrical Machine SystemDocument9 pagesA Novel Passive Filter To Reduce PWM Inverters Adverse Effects in Electrical Machine SystemshaheerdurraniPas encore d'évaluation
- Logarithmic and Antilogarithmic AmplifierDocument6 pagesLogarithmic and Antilogarithmic AmplifierSamuel Eduardo Toro GómezPas encore d'évaluation
- Modelling of Operational Amplifier by Using CMOS Technology: VSRD-IJEECE, Vol. 2 (6), 2012, 330-336Document7 pagesModelling of Operational Amplifier by Using CMOS Technology: VSRD-IJEECE, Vol. 2 (6), 2012, 330-336Akash VermaPas encore d'évaluation
- Cable Sizing for Non-Linear LoadsDocument12 pagesCable Sizing for Non-Linear Loadskhaldoun samiPas encore d'évaluation
- An203 - c8051fxxx Printed Circuit Board Design Notes - Silicon - LabsDocument22 pagesAn203 - c8051fxxx Printed Circuit Board Design Notes - Silicon - LabsEdson PaivaPas encore d'évaluation
- Electronics 08 01137 v2Document14 pagesElectronics 08 01137 v2sigit kurniawanPas encore d'évaluation
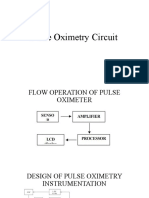
- Pulse Oximetry CircuitDocument19 pagesPulse Oximetry Circuitنواف الجهنيPas encore d'évaluation
- Edn Design Ideas IIIDocument5 pagesEdn Design Ideas IIIagmnm1962100% (2)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1D'EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Évaluation : 2.5 sur 5 étoiles2.5/5 (3)
- 5.8Ghz Circularly Polarized Rectennas Using Schottky Diode and Ltc5535 Rectifier For RF Energy HarvestingDocument4 pages5.8Ghz Circularly Polarized Rectennas Using Schottky Diode and Ltc5535 Rectifier For RF Energy HarvestingNag ChallaPas encore d'évaluation
- Glossary: A Factor Ais180Document1 pageGlossary: A Factor Ais180khrid3Pas encore d'évaluation
- Neukomm PDocument15 pagesNeukomm PDiego RodriguezPas encore d'évaluation
- Paper - An Electric Fence Energizer Design MethodDocument6 pagesPaper - An Electric Fence Energizer Design MethodMaria G AnimalistaPas encore d'évaluation
- PWM Transmitter DesignDocument5 pagesPWM Transmitter DesignAKASHPas encore d'évaluation
- Reduction of Electromagnetic Interference in DC-DC Converter Using ChaosDocument4 pagesReduction of Electromagnetic Interference in DC-DC Converter Using ChaosPrasenjit WakodePas encore d'évaluation
- Electrochemcial Society - 2007 - Sahalov Et Al - The Influence of Applied Potential On The Impedance of Alkanethiol SAMsDocument1 pageElectrochemcial Society - 2007 - Sahalov Et Al - The Influence of Applied Potential On The Impedance of Alkanethiol SAMsshreypathakPas encore d'évaluation
- Point-of-Care Assay Platform For Quantifying Active Enzymes To Femtomolar Levels Using Measurements of Time As The ReadoutDocument8 pagesPoint-of-Care Assay Platform For Quantifying Active Enzymes To Femtomolar Levels Using Measurements of Time As The ReadoutshreypathakPas encore d'évaluation
- Graphene Transistors by Frank SchwierzDocument10 pagesGraphene Transistors by Frank SchwierzshreypathakPas encore d'évaluation
- ElectroAnalysis - 1999 - Polk Et Al - Design of SSArray For Potentiometric and iMPEDANCE SENSING in GAS PHASEDocument5 pagesElectroAnalysis - 1999 - Polk Et Al - Design of SSArray For Potentiometric and iMPEDANCE SENSING in GAS PHASEshreypathakPas encore d'évaluation
- Graphene Transistors by Frank SchwierzDocument10 pagesGraphene Transistors by Frank SchwierzshreypathakPas encore d'évaluation
- Cadence Sim Man EE330 MaterialDocument50 pagesCadence Sim Man EE330 MaterialshreypathakPas encore d'évaluation
- IEEE Trans Biomed - 2009 - Yang Et Al - Amperometric Electrochem Us For Mini Protein Biosensor ArrayDocument9 pagesIEEE Trans Biomed - 2009 - Yang Et Al - Amperometric Electrochem Us For Mini Protein Biosensor ArrayshreypathakPas encore d'évaluation
- Notes PHD VivasDocument1 pageNotes PHD VivasshreypathakPas encore d'évaluation
- Tutorial Complete CadenceDocument59 pagesTutorial Complete Cadenceswain.ayasPas encore d'évaluation
- Diverse BTS For Sale From Power Storm 4SN06200834Document4 pagesDiverse BTS For Sale From Power Storm 4SN06200834Mohamed KsimaPas encore d'évaluation
- Dewan Md. Iftakharul Anik: Career ObjectiveDocument2 pagesDewan Md. Iftakharul Anik: Career ObjectiveDewan Md. Iftakharul AnikPas encore d'évaluation
- WPTDocument10 pagesWPTsrivaas131985Pas encore d'évaluation
- 8051 Microcontroller Book PDFDocument26 pages8051 Microcontroller Book PDFswati pasiPas encore d'évaluation
- EE3101 Lab Manual 2013 UMNDocument17 pagesEE3101 Lab Manual 2013 UMNNate LinxPas encore d'évaluation
- Low Noise J-FET Dual Op Amps TL072Document9 pagesLow Noise J-FET Dual Op Amps TL072Jose M PeresPas encore d'évaluation
- Experiment # 05: Parallel Operation of Two Single Phase TransformersDocument4 pagesExperiment # 05: Parallel Operation of Two Single Phase TransformersNasir Ali / Lab Engineer, Electrical Engineering DepartmentPas encore d'évaluation
- ONGAKU Manual SmallerDocument15 pagesONGAKU Manual SmallerEsteban BikicPas encore d'évaluation
- Eee-V-linear Ics and Applications (10ee56) - NotesDocument132 pagesEee-V-linear Ics and Applications (10ee56) - NotesSai Prasanna JandhyalaPas encore d'évaluation
- Synchronous Step-Down11Document57 pagesSynchronous Step-Down11ed251Pas encore d'évaluation
- Lm80-p0436-51 Apq8016 Processor Design GuidelinesDocument86 pagesLm80-p0436-51 Apq8016 Processor Design GuidelinesGustavo FélixPas encore d'évaluation
- 22 - R20 - MID 2 TT June 2023Document14 pages22 - R20 - MID 2 TT June 2023Sai Pavan Kumar NandigamPas encore d'évaluation
- Datasheet - X-DA4125EN With 24 VDC - EN2.5Document2 pagesDatasheet - X-DA4125EN With 24 VDC - EN2.5Walid DerradjiPas encore d'évaluation
- ENGIN 112 Intro To Electrical and Computer Engineering: Binary Adders and SubtractorsDocument20 pagesENGIN 112 Intro To Electrical and Computer Engineering: Binary Adders and SubtractorsRichie LatchmanPas encore d'évaluation
- Analog Circuit Design MOS Device PhysicsDocument42 pagesAnalog Circuit Design MOS Device PhysicsJaeduk HanPas encore d'évaluation
- State Forest Service Exam Electronics KeyDocument83 pagesState Forest Service Exam Electronics KeyDeepak YugaPas encore d'évaluation
- 11 Instruction Set of 8086Document61 pages11 Instruction Set of 8086kingmeno0% (1)
- Chapter 9 MemoryDocument28 pagesChapter 9 MemoryBinod ManandharPas encore d'évaluation
- MangaloreCircle 19 03 2023 25 03 2023Document4 pagesMangaloreCircle 19 03 2023 25 03 2023Karan kundraPas encore d'évaluation
- LB91B 47lh50ydDocument66 pagesLB91B 47lh50ydMaiaraFirminoPas encore d'évaluation
- ST10F280 JT3Document186 pagesST10F280 JT3Carlos Geeket' El HalabiPas encore d'évaluation
- Data Sheet MKP1584Document17 pagesData Sheet MKP1584aafeletronicaPas encore d'évaluation
- Dipole-Disk Antenna With Beam-Forming RingDocument6 pagesDipole-Disk Antenna With Beam-Forming RingtamilarasansrtPas encore d'évaluation
- Práctica 1 TiristoresDocument15 pagesPráctica 1 TiristoresDorian JesusPas encore d'évaluation
- Smart TV Serie 5 UN40EH5300 Full HDDocument69 pagesSmart TV Serie 5 UN40EH5300 Full HDZsasz HernandezPas encore d'évaluation
- SSP2N60B/SSS2N60B: 600V N-Channel MOSFETDocument11 pagesSSP2N60B/SSS2N60B: 600V N-Channel MOSFETCuenta ParaPas encore d'évaluation
- PLCDocument47 pagesPLCishwarPas encore d'évaluation
- Design and Simulation of 80 KHZ High Frequency Converter Using CD 4047IC CMOSDocument6 pagesDesign and Simulation of 80 KHZ High Frequency Converter Using CD 4047IC CMOSEditor IJTSRD100% (1)
- Understanding Microstrip LinesDocument23 pagesUnderstanding Microstrip Linescdg prqPas encore d'évaluation