Vous aimerez peut-être aussi
- Casino Regulatory Manual For Entertainment City Licensees Version 4Document366 pagesCasino Regulatory Manual For Entertainment City Licensees Version 4Paige Lim100% (2)
- Chapter11.Flexible Budgeting and The Management of Overhead and Support Activity CostsDocument34 pagesChapter11.Flexible Budgeting and The Management of Overhead and Support Activity CostsStephanie Ann AsuncionPas encore d'évaluation
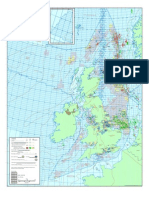
- North Sea Oil and Gas Wall MapDocument1 pageNorth Sea Oil and Gas Wall Mapbarnibar1Pas encore d'évaluation
- Basics of CrystallographyDocument60 pagesBasics of Crystallographylmanna454Pas encore d'évaluation
- Partnership LiquidationDocument20 pagesPartnership LiquidationIvhy Cruz Estrella0% (1)
- Watch and Clock Escapements A Complete Study in Theory and Practice of the Lever, Cylinder and Chronometer Escapements, Together with a Brief Account of the Origin and Evolution of the Escapement in HorologyD'EverandWatch and Clock Escapements A Complete Study in Theory and Practice of the Lever, Cylinder and Chronometer Escapements, Together with a Brief Account of the Origin and Evolution of the Escapement in HorologyPas encore d'évaluation
- Basic Documents and Transactions Related To Bank DepositsDocument15 pagesBasic Documents and Transactions Related To Bank DepositsJessica80% (5)
- Linear Time Triangulation of Special Polygons: Deepit Purkayastha 09CS3013Document8 pagesLinear Time Triangulation of Special Polygons: Deepit Purkayastha 09CS3013Deepit PurkayasthaPas encore d'évaluation
- Magnetic Field Around Finite SolenoidDocument42 pagesMagnetic Field Around Finite SolenoidjabruPas encore d'évaluation
- Part 8Document27 pagesPart 8TwinkelsPas encore d'évaluation
- AC Lesson LectureDocument56 pagesAC Lesson LectureMKPas encore d'évaluation
- Convex HullDocument10 pagesConvex HullmarionblunaPas encore d'évaluation
- Chapter 6Document56 pagesChapter 6hmdniltfi0% (1)
- Aerial Robotics Lecture 2A - 4 Axis-Angle Representations For RotationsDocument6 pagesAerial Robotics Lecture 2A - 4 Axis-Angle Representations For RotationsIain McCullochPas encore d'évaluation
- CG 6Document26 pagesCG 6pankajchandre30Pas encore d'évaluation
- USA Mathematical Talent SearchDocument14 pagesUSA Mathematical Talent SearchSitan ChenPas encore d'évaluation
- Lec29 ExplainDocument22 pagesLec29 Explainanton dmitriPas encore d'évaluation
- Lec2 PDFDocument26 pagesLec2 PDFsuntararaajanPas encore d'évaluation
- Coordinat Lines, and Point 2Document10 pagesCoordinat Lines, and Point 2yahya rizkiPas encore d'évaluation
- Astronomy SolutionsDocument15 pagesAstronomy SolutionsGowrisankar RaoPas encore d'évaluation
- Surface AreaDocument5 pagesSurface AreaKruger JoePas encore d'évaluation
- Trig Graphs and EquationsDocument56 pagesTrig Graphs and EquationsBerry MatsimelaPas encore d'évaluation
- 5.stokes TheoremDocument7 pages5.stokes TheoremPrasanta NaskarPas encore d'évaluation
- CirclesDocument61 pagesCirclesbasavarasaPas encore d'évaluation
- Arc Length and Surface AreaDocument5 pagesArc Length and Surface AreaAimee Layson PolancoPas encore d'évaluation
- Banach Tarski BallDocument13 pagesBanach Tarski BallpidoPas encore d'évaluation
- StokesDocument6 pagesStokesChernet TugePas encore d'évaluation
- Statement of The ProblemDocument27 pagesStatement of The ProblemMjGutierrezPas encore d'évaluation
- CG 5Document68 pagesCG 5pankajchandre30Pas encore d'évaluation
- Kuhn's Algorithm For Finding The Greatest Matching in A Bipartite GraphDocument6 pagesKuhn's Algorithm For Finding The Greatest Matching in A Bipartite GraphRavi GohelPas encore d'évaluation
- Parametric SurfacesDocument7 pagesParametric SurfacesChernet TugePas encore d'évaluation
- Construct A Fold Cross-Section Using The Arc (Busk) MethodDocument14 pagesConstruct A Fold Cross-Section Using The Arc (Busk) MethodMuhsan Iskandar Juarsa100% (1)
- Graham ScanDocument3 pagesGraham ScanKobach23Pas encore d'évaluation
- Chapter 10 - Vector and Geometry SpaceDocument66 pagesChapter 10 - Vector and Geometry SpaceRiyad MohammedPas encore d'évaluation
- Plane Curves, Curvature, and Arclength: (T - Sin (T), 1 - Cos (T) )Document16 pagesPlane Curves, Curvature, and Arclength: (T - Sin (T), 1 - Cos (T) )Leo KutsPas encore d'évaluation
- Major Assignment 1 2017Document9 pagesMajor Assignment 1 2017Gurparkash Singh SohiPas encore d'évaluation
- Convex Hull AlgorithmsDocument4 pagesConvex Hull AlgorithmsAbhishikta SaiPas encore d'évaluation
- Wallpaper Designs of Mirror CurvesDocument8 pagesWallpaper Designs of Mirror Curvesjuan perez arrikitaunPas encore d'évaluation
- Chapter 2. Functions of Several VariablesDocument43 pagesChapter 2. Functions of Several Variablesyeyem12345Pas encore d'évaluation
- CG-module 4 NotesDocument21 pagesCG-module 4 NotesRajeswari RPas encore d'évaluation
- Coordinate and GeometryDocument98 pagesCoordinate and GeometryTanveerAli01Pas encore d'évaluation
- CSE 101 Homework 2 Solutions: Winter 2021Document3 pagesCSE 101 Homework 2 Solutions: Winter 2021Hoang NguyenPas encore d'évaluation
- Robust Field-Aligned Global Parametrization: Supplement 1, Proofs and Algorithmic DetailsDocument4 pagesRobust Field-Aligned Global Parametrization: Supplement 1, Proofs and Algorithmic Detailsrtfss13666Pas encore d'évaluation
- Projectile Motion PDFDocument28 pagesProjectile Motion PDFilyasheee901Pas encore d'évaluation
- Abdulla Bin Askar GroupfjvdjfvDocument15 pagesAbdulla Bin Askar Groupfjvdjfvapi-240156957Pas encore d'évaluation
- Lec8 PDFDocument25 pagesLec8 PDFsabhari_ramPas encore d'évaluation
- Geometri EuclidDocument39 pagesGeometri EuclidVita100% (1)
- Lec 9Document21 pagesLec 9DrSneha SharmaPas encore d'évaluation
- 082187571X GeometriesDocument160 pages082187571X GeometriescarlosPas encore d'évaluation
- Divide and Conquer - ContinuedDocument6 pagesDivide and Conquer - ContinuedS U B R O 0Pas encore d'évaluation
- Collision Detection EllipseDocument20 pagesCollision Detection EllipsemasharecoPas encore d'évaluation
- Deriving The Metric of Euclidean Space NEWNEW NEWDocument3 pagesDeriving The Metric of Euclidean Space NEWNEW NEWjohndoe21718Pas encore d'évaluation
- EP2CD4T2. PlanarMechanisms ForceTransforms MotionWRTRotatingFrames2Document41 pagesEP2CD4T2. PlanarMechanisms ForceTransforms MotionWRTRotatingFrames2Jason wonwonPas encore d'évaluation
- Monotone Convergence TheoremDocument6 pagesMonotone Convergence TheoremmutasiliPas encore d'évaluation
- Group 3Document17 pagesGroup 3indula123Pas encore d'évaluation
- Suppose YouDocument7 pagesSuppose YouAnonymous eZB6YajtBnPas encore d'évaluation
- Thrust Optimised Parabolic NozzleDocument6 pagesThrust Optimised Parabolic NozzleVinoth BalasubramaniyanPas encore d'évaluation
- Cohen A. Group Theory For Maths, Physics and Chemistry Students 2002Document91 pagesCohen A. Group Theory For Maths, Physics and Chemistry Students 2002Thongkool CtpPas encore d'évaluation
- Proofs of Trigonometric Identities - WikipediaDocument35 pagesProofs of Trigonometric Identities - WikipediaChris BakamPas encore d'évaluation
- Cantor SetDocument7 pagesCantor SetMauri Ericson SombowadilePas encore d'évaluation
- CliftonBridge To VELASCODocument7 pagesCliftonBridge To VELASCOMaximo Cusihuata ChoquePas encore d'évaluation
- On The Motion of A Ball in A Sinusoidal Billiards SystemDocument16 pagesOn The Motion of A Ball in A Sinusoidal Billiards SystempeytonjohniganPas encore d'évaluation
- Class Notes, Trajectory Planning, COMS4733: 1 TrajectoriesDocument9 pagesClass Notes, Trajectory Planning, COMS4733: 1 TrajectoriesVashish RamrechaPas encore d'évaluation
- Minimum Bounding Box: Unveiling the Power of Spatial Optimization in Computer VisionD'EverandMinimum Bounding Box: Unveiling the Power of Spatial Optimization in Computer VisionPas encore d'évaluation
- Land Meant For Petrol Station or Has The Potential For Petrol StationDocument2 pagesLand Meant For Petrol Station or Has The Potential For Petrol StationselvarajPas encore d'évaluation
- CV in World BankDocument8 pagesCV in World BankNydzerPas encore d'évaluation
- Textile & Apparel IndustryDocument13 pagesTextile & Apparel IndustryGOKAPas encore d'évaluation
- 06 GDP and Economic GrowthDocument3 pages06 GDP and Economic GrowthAkash Chandak0% (2)
- 8294 PDFDocument174 pages8294 PDFManjeet Pandey100% (1)
- Lecture 3Document14 pagesLecture 3skye080Pas encore d'évaluation
- Price Elasticity of Supply (PES)Document23 pagesPrice Elasticity of Supply (PES)SyedPas encore d'évaluation
- NovDec Flowertown Knitting Guild NewsletterDocument5 pagesNovDec Flowertown Knitting Guild NewsletterScarlett McCrary Jones LmtPas encore d'évaluation
- Exam2 Solutions 40610 2008Document8 pagesExam2 Solutions 40610 2008blackghostPas encore d'évaluation
- Duke Energy Coal AllocationDocument4 pagesDuke Energy Coal AllocationSatish Kumar100% (1)
- Economic Cycles: Historical Evidence, Classification and ExplicationDocument29 pagesEconomic Cycles: Historical Evidence, Classification and ExplicationkyffusPas encore d'évaluation
- Hilado v. CIRDocument5 pagesHilado v. CIRclandestine2684Pas encore d'évaluation
- Deregulation of Energy Sector in NigeriaDocument15 pagesDeregulation of Energy Sector in NigeriaWilliam BabigumiraPas encore d'évaluation
- Insurance Company Final AccountsDocument17 pagesInsurance Company Final AccountsKirti_Bhatia_5739Pas encore d'évaluation
- Topic 6-Cash Flow in Capital BudgetingDocument61 pagesTopic 6-Cash Flow in Capital BudgetingBaby KhorPas encore d'évaluation
- Partnership SBCDocument10 pagesPartnership SBChyosunglover100% (1)
- Presentation ON Spectrum Brands, Inc. The Sales Force DilemmaDocument21 pagesPresentation ON Spectrum Brands, Inc. The Sales Force DilemmaNaresh Vemisetti0% (1)
- TKM Training ManualDocument34 pagesTKM Training ManualRajaraamanSrinivasPas encore d'évaluation
- The Beer Industry in The NetherlandsDocument2 pagesThe Beer Industry in The NetherlandsAliceLePas encore d'évaluation
- Air Transport Beyond The Crisis - Pascal Huet - WTFL 2009Document18 pagesAir Transport Beyond The Crisis - Pascal Huet - WTFL 2009World Tourism Forum LucernePas encore d'évaluation
- List of Guest HousesDocument5 pagesList of Guest Housesramineedi6Pas encore d'évaluation
- Lucian A 1Document17 pagesLucian A 1keylaelizabehtPas encore d'évaluation
- Monday To Friday: - Solihull To Coventry Via Catherine-de-Barnes, Hampton-in-Arden & MeridenDocument2 pagesMonday To Friday: - Solihull To Coventry Via Catherine-de-Barnes, Hampton-in-Arden & MeridenanuragrathorePas encore d'évaluation
- Econ Practice Exam 2Document15 pagesEcon Practice Exam 2MKPas encore d'évaluation
- Business London's 20 Under 40 - London's New Economic TrailblazersDocument2 pagesBusiness London's 20 Under 40 - London's New Economic TrailblazersrtractionPas encore d'évaluation