Vous aimerez peut-être aussi
- Porticos 3D (Porticos Espaciales) PDFDocument32 pagesPorticos 3D (Porticos Espaciales) PDFFernando SpinPas encore d'évaluation
- Elemento Triangular 2017 2 PDFDocument57 pagesElemento Triangular 2017 2 PDFANDRES RIVERAPas encore d'évaluation
- Efecto de La No Linealidad Del Suelo en La Interacción Suelo-Estructura en Edificios Con Zapatas CorridasDocument6 pagesEfecto de La No Linealidad Del Suelo en La Interacción Suelo-Estructura en Edificios Con Zapatas CorridasManuel AmayaPas encore d'évaluation
- Ejercicios Resueltos de Dinamica para El Tercer ExamenDocument36 pagesEjercicios Resueltos de Dinamica para El Tercer ExamenJean Bettner Cisneros ArroyoPas encore d'évaluation
- Solucion Indicial MATLABDocument4 pagesSolucion Indicial MATLABCamilo OrmenoPas encore d'évaluation
- Analisis Estructural IIDocument5 pagesAnalisis Estructural IIJIMMY_3788Pas encore d'évaluation
- Clase 5 Elementos FinitosDocument63 pagesClase 5 Elementos FinitosJorGe IsRaelPas encore d'évaluation
- Análisis Pseudo TridimensionalDocument7 pagesAnálisis Pseudo Tridimensionalkanario2006100% (1)
- Modelado Aisladores de Masa EtabsDocument127 pagesModelado Aisladores de Masa EtabsJaime CoronellPas encore d'évaluation
- Trabajo Parcial PimentelDocument179 pagesTrabajo Parcial PimentelasdasdPas encore d'évaluation
- Cimentaciones Especiales Garza PDFDocument160 pagesCimentaciones Especiales Garza PDFUriel Vélez Orejuela100% (1)
- 20200326121847Document50 pages20200326121847Johanny GarcesPas encore d'évaluation
- Tesis Jorge Alberto Rosero Quevedo - Universidad de Guayaquil - Ingeniería CivilDocument248 pagesTesis Jorge Alberto Rosero Quevedo - Universidad de Guayaquil - Ingeniería Civiljorginho2010Pas encore d'évaluation
- Zanjas EscalonadasDocument11 pagesZanjas EscalonadasEdwin Arenas100% (1)
- Pórtico 3DDocument10 pagesPórtico 3DHalver de lacruz100% (1)
- Guía Sap2000 - MCV (Ahpe) PDFDocument21 pagesGuía Sap2000 - MCV (Ahpe) PDFDevyn GutierrezPas encore d'évaluation
- Capítulo 19Document62 pagesCapítulo 19Nicole Michelle Andrade GomezPas encore d'évaluation
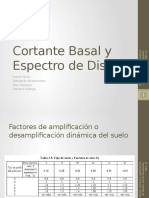
- Cortante Basal y Espectro de DiseñoDocument16 pagesCortante Basal y Espectro de DiseñoJosé Sebastián BustamantePas encore d'évaluation
- Diseño Zapata Aislada Con Excentricidad UniaxialDocument15 pagesDiseño Zapata Aislada Con Excentricidad UniaxialMateoContreuxMelodayPas encore d'évaluation
- Informe Analisis Dinámico Modal Espectral 2018-1Document35 pagesInforme Analisis Dinámico Modal Espectral 2018-1Julian Nio GuzmanPas encore d'évaluation
- Parrilla Plana ARDocument28 pagesParrilla Plana ARNelson RiveraPas encore d'évaluation
- Análisis Pseudo TridimensionalDocument28 pagesAnálisis Pseudo TridimensionalElber Bonilla Del CarpioPas encore d'évaluation
- Muros de ContencionDocument4 pagesMuros de ContencionpalmerascityPas encore d'évaluation
- Flexión, Simetria y Antisimetria.r2Document22 pagesFlexión, Simetria y Antisimetria.r2Paúl Sam AvellanedaPas encore d'évaluation
- Diagramas de Flujo Fundaciones Concreto ArmadoDocument4 pagesDiagramas de Flujo Fundaciones Concreto ArmadoRODRIGO ALBERTO BARRERA VALDIVIAPas encore d'évaluation
- Metodo Grundy-Kaibala PDFDocument10 pagesMetodo Grundy-Kaibala PDFandresPas encore d'évaluation
- Análisis Dinámico Modal de Estructuras 2D Con MATHCAD PRIME 4.0 PDFDocument57 pagesAnálisis Dinámico Modal de Estructuras 2D Con MATHCAD PRIME 4.0 PDFProyectista IngenierosPas encore d'évaluation
- Integral de DuhamelDocument34 pagesIntegral de DuhamelIvan FmsPas encore d'évaluation
- Ae1 2018 - Ii Clase Tema 05 - P02 Portico Fila A PDFDocument5 pagesAe1 2018 - Ii Clase Tema 05 - P02 Portico Fila A PDFMARCOS JOSUE RUPAY VARGASPas encore d'évaluation
- Adscripcion 2018 PDFDocument436 pagesAdscripcion 2018 PDFRodrigo Lizarazu FerrelPas encore d'évaluation
- Cap 7Document9 pagesCap 7Anonymous 1fKeMfwFPas encore d'évaluation
- Ejemplo de Aplicacion Momento CurvaturaDocument16 pagesEjemplo de Aplicacion Momento CurvaturaRigobertoGuerraPas encore d'évaluation
- Informe de Avance de Obra Sistema de Tratamiento de Aguas ResidualesDocument17 pagesInforme de Avance de Obra Sistema de Tratamiento de Aguas ResidualesCarlos Fernando Gallego GilPas encore d'évaluation
- Super PaveDocument9 pagesSuper PavepedroPas encore d'évaluation
- Ingenieria Sismica: Espectros de Respuesta Y de DiseñoDocument77 pagesIngenieria Sismica: Espectros de Respuesta Y de Diseñoel pepePas encore d'évaluation
- SeismoStruct 2018 Manual de Usuario - SPADocument506 pagesSeismoStruct 2018 Manual de Usuario - SPAStelios Antoniou100% (1)
- Presion PasivaDocument11 pagesPresion PasivaMónica HernándezPas encore d'évaluation
- Diseã - o de Mezcla OctubreDocument31 pagesDiseã - o de Mezcla OctubreSteven SandovalPas encore d'évaluation
- SUCS (Flujograma)Document1 pageSUCS (Flujograma)vale ramirezPas encore d'évaluation
- Matriz de Rigidez Diafragma Rigido PDFDocument113 pagesMatriz de Rigidez Diafragma Rigido PDFaldoalexisPas encore d'évaluation
- ETABSDocument3 pagesETABSCristofer VenturaPas encore d'évaluation
- Distribucion de PresionesDocument28 pagesDistribucion de PresionesAnaisPas encore d'évaluation
- Dinámica EstructuralDocument1 pageDinámica EstructuralFrank Soto MendezPas encore d'évaluation
- Modelo de Plasticidad Concentrada de GibersonDocument6 pagesModelo de Plasticidad Concentrada de Gibersoncarlossam7191Pas encore d'évaluation
- Porticos 3d Metodo de La RigidezDocument10 pagesPorticos 3d Metodo de La RigidezDaniel Chapoñan CuevaPas encore d'évaluation
- Introduccion Curso Ingenieria Antisismica - 2012Document16 pagesIntroduccion Curso Ingenieria Antisismica - 2012Albeins Reyes Melgarejo0% (1)
- Dinamicaestructural StevenDocument94 pagesDinamicaestructural StevenSteven Angel Cuellar NinanyaPas encore d'évaluation
- Análisi MatricialDocument22 pagesAnálisi MatricialJuan Manuel VelezPas encore d'évaluation
- Ejercicio Muro CantileverDocument15 pagesEjercicio Muro CantileverMiguel VielmaPas encore d'évaluation
- Viga de Arriostre A TraccionDocument4 pagesViga de Arriostre A TraccionJaime NovakPas encore d'évaluation
- Analisis de Una Loza Aligerada Matricial FinalDocument13 pagesAnalisis de Una Loza Aligerada Matricial FinalDikxon BcsPas encore d'évaluation
- Cimentaciones Superficiales Suelos II 2Document20 pagesCimentaciones Superficiales Suelos II 2Miguel Paredes TorresPas encore d'évaluation
- Analisis de Portico 3D PDFDocument34 pagesAnalisis de Portico 3D PDFEmanuel Sifuentes100% (1)
- Análisis Sísmico Modal Espectral & Tiempo Historia de Una Edificación Con MATHCAD Prime, CSI SAP2000 y ETABS - CivilGeeks PDFDocument57 pagesAnálisis Sísmico Modal Espectral & Tiempo Historia de Una Edificación Con MATHCAD Prime, CSI SAP2000 y ETABS - CivilGeeks PDFwesr1956Pas encore d'évaluation
- Celosias 3DDocument28 pagesCelosias 3DAlan LPPas encore d'évaluation
- Sem 04 - PPT - Superficies Cuádricas y Revolución.Document31 pagesSem 04 - PPT - Superficies Cuádricas y Revolución.Jackeline AlvaradoPas encore d'évaluation
- Placas Mindlin PDFDocument23 pagesPlacas Mindlin PDFQuispeSullcarayKevinPas encore d'évaluation
- Elasticidad 2DDocument53 pagesElasticidad 2DVilma Puma InostrozaPas encore d'évaluation
- Placas ClasicasDocument31 pagesPlacas ClasicasGreidy Janampa MamaniPas encore d'évaluation
- 01 - Primer Examen Parcial-04!10!16Document2 pages01 - Primer Examen Parcial-04!10!16Julio Aguilar ChaniniPas encore d'évaluation
- 2016 V - Syllabus - Costos y PresupuestosDocument4 pages2016 V - Syllabus - Costos y PresupuestosJulio Aguilar ChaniniPas encore d'évaluation
- Julio CesarDocument21 pagesJulio CesarJulio Aguilar ChaniniPas encore d'évaluation
- Diseño de Losas Macizas-Unjbg-TacnaDocument8 pagesDiseño de Losas Macizas-Unjbg-TacnaJulio Aguilar ChaniniPas encore d'évaluation
- Diseño de BocatomasDocument59 pagesDiseño de BocatomasJulio Aguilar ChaniniPas encore d'évaluation
- Complemto de Analisis Estructural IIDocument12 pagesComplemto de Analisis Estructural IIJulio Aguilar ChaniniPas encore d'évaluation
- Analisis Costo UnitarioDocument22 pagesAnalisis Costo UnitarioJulio Aguilar Chanini0% (1)
- Analogos y AntilogosDocument4 pagesAnalogos y AntilogosDeisy Jasmin Apaza PumaPas encore d'évaluation
- Calculo de Escalera 2017Document4 pagesCalculo de Escalera 2017Eliana Di BárbaroPas encore d'évaluation
- Ficha Hipoclorito de SodioDocument4 pagesFicha Hipoclorito de SodioManuel Antonio Silva GuevaraPas encore d'évaluation
- Adn Y Emociones Por Gregg BradenDocument3 pagesAdn Y Emociones Por Gregg BradenIgor Medeot DiazPas encore d'évaluation
- Cuestionario FinalDocument6 pagesCuestionario FinalRodrigo Calderon LopezPas encore d'évaluation
- k.-2 Dinamica de Suelos Como Medio Continuo.Document27 pagesk.-2 Dinamica de Suelos Como Medio Continuo.Jose Luis Triguero100% (1)
- Presentación Software LINDO 6.1Document16 pagesPresentación Software LINDO 6.1roberto100% (1)
- Método Matricial de La RigidezDocument9 pagesMétodo Matricial de La RigidezjhonmoyatPas encore d'évaluation
- Las Comunicaciones en Emergencias y CatástrofesDocument22 pagesLas Comunicaciones en Emergencias y CatástrofesmenssesPas encore d'évaluation
- Tippens - Dinamica de Cuerpo RigidoDocument33 pagesTippens - Dinamica de Cuerpo Rigidojaimecolonche100% (1)
- SRM ProveedoresDocument13 pagesSRM Proveedoreshenrysobrino100% (1)
- Importancia de Elaborar Un Plan EstratégicoDocument6 pagesImportancia de Elaborar Un Plan EstratégicoSteven BriceñoPas encore d'évaluation
- Constancia de No AdeudoDocument1 pageConstancia de No AdeudoVanessa GuzmanPas encore d'évaluation
- 14 Aplicaciones Industriales de La Absorción de GasesDocument6 pages14 Aplicaciones Industriales de La Absorción de GasesValeria Catalina Galárraga Campoverde100% (2)
- Tesis CoagulantesDocument145 pagesTesis CoagulantesJuanitaPas encore d'évaluation
- Cálculo y Seleccíon de RodamientosDocument14 pagesCálculo y Seleccíon de RodamientosHerlis Esmith Mija TacurePas encore d'évaluation
- Diapos de Sedimentacion Meneses Falta GraficosDocument28 pagesDiapos de Sedimentacion Meneses Falta GraficosClaudiaPalominoZelayaPas encore d'évaluation
- Funcionamiento Del Sistema de Abastecimiento Urbano Del Estado LaraDocument3 pagesFuncionamiento Del Sistema de Abastecimiento Urbano Del Estado LaraStephany DiasPas encore d'évaluation
- TRIPTICODocument5 pagesTRIPTICOabalaloxizPas encore d'évaluation
- Cald. Ferroli Domiproject D, Calderas MuralesDocument2 pagesCald. Ferroli Domiproject D, Calderas MuraleslilymaulenPas encore d'évaluation
- MII UC DescripcionDocument19 pagesMII UC DescripcionEleazar MadariagaPas encore d'évaluation
- Norma NTG 41085-Gua Instalacin de Adoquines PDFDocument43 pagesNorma NTG 41085-Gua Instalacin de Adoquines PDFLuis JimenezPas encore d'évaluation
- Pontofocal Textos Regulamentos PAN 21Document3 pagesPontofocal Textos Regulamentos PAN 21Gabriela CortèsPas encore d'évaluation
- PPE Problema 2 Resuelto PDFDocument3 pagesPPE Problema 2 Resuelto PDFELVIA YAQUELIN GALDAMEZ ZUNIGAPas encore d'évaluation
- Especificaciones Técnicas en Asfaltos Líquidos de Curado LentoDocument3 pagesEspecificaciones Técnicas en Asfaltos Líquidos de Curado LentoAngel Miranda MoralesPas encore d'évaluation
- Presentacion-1.1 Resistencia Al FuegoDocument71 pagesPresentacion-1.1 Resistencia Al Fuegouniramirez100% (1)
- Laboratorio de Ingeniería de MaterialesDocument5 pagesLaboratorio de Ingeniería de Materialessaul lopezPas encore d'évaluation
- M.A ÓpticaDocument31 pagesM.A ÓpticaTobe CabreraPas encore d'évaluation
- NORMASDocument12 pagesNORMASFernandezIrigoinRoberthPas encore d'évaluation
- Guía de Ejercicios Movimiento en Una DimensiónDocument7 pagesGuía de Ejercicios Movimiento en Una DimensiónsyliramPas encore d'évaluation