Vous aimerez peut-être aussi
- (J. D. Lambert) Numerical Methods For Ordinary Dif (1993) PDFDocument151 pages(J. D. Lambert) Numerical Methods For Ordinary Dif (1993) PDFJeoff Libo-on100% (1)
- FEM For 2D With MatlabDocument33 pagesFEM For 2D With Matlabammar_harbPas encore d'évaluation
- Local Linear Conditional Cumulative Distribution Function With Mixing DataDocument19 pagesLocal Linear Conditional Cumulative Distribution Function With Mixing Dataالشمس اشرقتPas encore d'évaluation
- Norm-Induced Inner ProductsDocument16 pagesNorm-Induced Inner ProductsshivsagardharamPas encore d'évaluation
- Rhotrix Topological SpaceDocument8 pagesRhotrix Topological SpacerjkmrkanwarPas encore d'évaluation
- Functional Problems AnhLe FullDocument152 pagesFunctional Problems AnhLe FullThai An NguyenPas encore d'évaluation
- Metric Space NotesDocument70 pagesMetric Space NotesNehal AnuragPas encore d'évaluation
- Oso 9780198827351 Chapter 3Document20 pagesOso 9780198827351 Chapter 3SigmundPas encore d'évaluation
- 02 Comss 22 Acar-TurgayDocument12 pages02 Comss 22 Acar-TurgayMustapha MaaroufPas encore d'évaluation
- GEORGIAN MATHEMATICAL JOURNAL: Vol. 3, No. 4, 1996, 319-342Document24 pagesGEORGIAN MATHEMATICAL JOURNAL: Vol. 3, No. 4, 1996, 319-342Bintang KejoraPas encore d'évaluation
- FA Chap4 1-4 PDFDocument4 pagesFA Chap4 1-4 PDFJuan Carlos Moreno OrtizPas encore d'évaluation
- 1084-Article Text-4070-1-10-20141013Document17 pages1084-Article Text-4070-1-10-20141013Prasoon PandeyPas encore d'évaluation
- An Overview On Tools From Functional Analysis: Matthias Augustin, Sarah Eberle, and Martin GrothausDocument35 pagesAn Overview On Tools From Functional Analysis: Matthias Augustin, Sarah Eberle, and Martin GrothaussergenPas encore d'évaluation
- Some Results On 2-Inner Product SpacesDocument6 pagesSome Results On 2-Inner Product SpacesSaid Darya Al AfghaniPas encore d'évaluation
- 0719 0646 Cubo 22 01 55Document16 pages0719 0646 Cubo 22 01 55talvane.santos069Pas encore d'évaluation
- A MULTIDIMENSIONAL BOUNDARY ANALOGUE OF HARTOGS'S THEOREM FOR INTEGRABLE FUNCTIONS ON n-CIRCULAR DOMAINSDocument10 pagesA MULTIDIMENSIONAL BOUNDARY ANALOGUE OF HARTOGS'S THEOREM FOR INTEGRABLE FUNCTIONS ON n-CIRCULAR DOMAINSCentral Asian StudiesPas encore d'évaluation
- Introduction To Hilbert Spaces: Herman J. Bierens Pennsylvania State UniversityDocument18 pagesIntroduction To Hilbert Spaces: Herman J. Bierens Pennsylvania State UniversityPrasann SethiPas encore d'évaluation
- Some Mathematical NotationsDocument4 pagesSome Mathematical Notationsababsaaziz60Pas encore d'évaluation
- 2.1 Properties of Vector SpacesDocument8 pages2.1 Properties of Vector SpacesRohit PrasadPas encore d'évaluation
- A Characterization of Inner Product SpacesDocument8 pagesA Characterization of Inner Product SpacesGeorge ProtopapasPas encore d'évaluation
- Chapter 2 Metric Spaces 2018Document19 pagesChapter 2 Metric Spaces 2018PutriPas encore d'évaluation
- Sufficient Conditions For Uniform Normal Structure of Banach Spaces and Their DualsDocument8 pagesSufficient Conditions For Uniform Normal Structure of Banach Spaces and Their Dualssatitz chongPas encore d'évaluation
- Linear Algebra Chapter 11 - Applications of Real Inner Product SpacesDocument12 pagesLinear Algebra Chapter 11 - Applications of Real Inner Product Spacesdaniel_bashir808Pas encore d'évaluation
- Lecture 4Document13 pagesLecture 4The tricksterPas encore d'évaluation
- Fuzzy Q-Ideals in Q-AlgebrasDocument12 pagesFuzzy Q-Ideals in Q-AlgebrasTI Journals PublishingPas encore d'évaluation
- Karesh CEJM 5 (4) 2007Document10 pagesKaresh CEJM 5 (4) 2007ErkinjonPas encore d'évaluation
- 2018.proceedings Cmmse 5Document4 pages2018.proceedings Cmmse 5JE Macias-DiazPas encore d'évaluation
- Global Asymptotic Stability of Solutions of A Functional Integral EquationDocument8 pagesGlobal Asymptotic Stability of Solutions of A Functional Integral EquationLuis Arce GonzálezPas encore d'évaluation
- 17B4 1-AllwebnotesDocument68 pages17B4 1-AllwebnotesAtaaye ZahraPas encore d'évaluation
- Some Mathematical NotationsDocument11 pagesSome Mathematical Notationsababsaaziz60Pas encore d'évaluation
- Some Mathematical NotationsDocument9 pagesSome Mathematical Notationsababsaaziz60Pas encore d'évaluation
- 5510 Notes F17 V1Document119 pages5510 Notes F17 V1saruji_sanPas encore d'évaluation
- Metric Convexity of Symmetric Cones: Lawson, J. and Lim, Y. Osaka J. MathDocument22 pagesMetric Convexity of Symmetric Cones: Lawson, J. and Lim, Y. Osaka J. MathSangat BaikPas encore d'évaluation
- MA 20104 Probability and Statistics Assignment No. 7Document3 pagesMA 20104 Probability and Statistics Assignment No. 7Subhajit BagPas encore d'évaluation
- Brief Introduction To Hilbert SpaceDocument9 pagesBrief Introduction To Hilbert SpaceΧάρης Φραντζικινάκης100% (2)
- Hilbert 3Document35 pagesHilbert 3HadeelAl-hamaamPas encore d'évaluation
- Minimal ProjectionDocument5 pagesMinimal ProjectionDityana Mila MauliaPas encore d'évaluation
- Notes 1: Introduction and DefinitionsDocument3 pagesNotes 1: Introduction and DefinitionsPete Jacopo Belbo CayaPas encore d'évaluation
- 978-1-6654-7661-4/22/$31.00 ©2022 Ieee 1Document12 pages978-1-6654-7661-4/22/$31.00 ©2022 Ieee 1vnodataPas encore d'évaluation
- Theoretical Foundations of The Finite Element MethodDocument18 pagesTheoretical Foundations of The Finite Element MethodsanathkeshavPas encore d'évaluation
- Large Deviation Principle For Reflected Stochastic Diffe 2023 Statistics PDocument12 pagesLarge Deviation Principle For Reflected Stochastic Diffe 2023 Statistics Ppepito perezPas encore d'évaluation
- 2.2. Norms 1Document8 pages2.2. Norms 1Muhammad ShoaibPas encore d'évaluation
- Report 4Document8 pagesReport 4Mahmoud KatayaPas encore d'évaluation
- Informationtheory-Lecture Slides-A1 Solutions 5037558613Document0 pageInformationtheory-Lecture Slides-A1 Solutions 5037558613gowthamkurriPas encore d'évaluation
- Annals v158 n1 p03Document42 pagesAnnals v158 n1 p03gengtian.ncgPas encore d'évaluation
- COHEN - Mixed Finite Elements With Mass-Lumping For The Transient Wave EquationDocument18 pagesCOHEN - Mixed Finite Elements With Mass-Lumping For The Transient Wave EquationAndrés MercadoPas encore d'évaluation
- How Small Are The Increments of G Brownian 2022 Statistics Probability LeDocument9 pagesHow Small Are The Increments of G Brownian 2022 Statistics Probability Lepepito perezPas encore d'évaluation
- 1.1 Review of Sections 1.2.1-1.2.2 - Elastic Bar: Compare With The 1-D CaseDocument3 pages1.1 Review of Sections 1.2.1-1.2.2 - Elastic Bar: Compare With The 1-D Casejulianli0220Pas encore d'évaluation
- Lecture 10-11Document10 pagesLecture 10-11alfalfa manPas encore d'évaluation
- A Fixed-Point Approach To Stability of Quadratic Functional Equation in Non-Archimedean 2-Normed SpacesDocument12 pagesA Fixed-Point Approach To Stability of Quadratic Functional Equation in Non-Archimedean 2-Normed SpacesInternational Journal of Innovative Science and Research Technology100% (1)
- Understanding Basic ProbabilityDocument7 pagesUnderstanding Basic ProbabilitynaveenrulezPas encore d'évaluation
- Towards The Cauchy Problem For TheDocument18 pagesTowards The Cauchy Problem For Theashraf shalghoumPas encore d'évaluation
- On Finite Noncommutative Grobner BasesDocument8 pagesOn Finite Noncommutative Grobner BasesYatma DiopPas encore d'évaluation
- Solving Linear Boundary Value Problem Using Shooting Continuous Explicit Runge-Kutta MethodDocument8 pagesSolving Linear Boundary Value Problem Using Shooting Continuous Explicit Runge-Kutta Methodhassan1993Pas encore d'évaluation
- Fully Invariant and Characteristic Interval Valued Intuition Is Tic Fuzzy Dual Ideals of BFDocument8 pagesFully Invariant and Characteristic Interval Valued Intuition Is Tic Fuzzy Dual Ideals of BFAlexander DeckerPas encore d'évaluation
- ConferenceDocument17 pagesConferenceAb JubrilPas encore d'évaluation
- 6 - Adesh Kumar TripathiDocument4 pages6 - Adesh Kumar TripathiiistePas encore d'évaluation
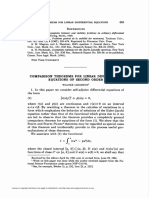
- Comparison Theorems For Linear Differential Equations of Second Order - LeightonDocument8 pagesComparison Theorems For Linear Differential Equations of Second Order - Leightoniatrakisg8671Pas encore d'évaluation
- DonatoDocument11 pagesDonatoHuỳnh NguyênPas encore d'évaluation
- Cohomology Operations (AM-50), Volume 50: Lectures by N. E. Steenrod. (AM-50)D'EverandCohomology Operations (AM-50), Volume 50: Lectures by N. E. Steenrod. (AM-50)Pas encore d'évaluation
- T FG Martinez Bae NaDocument32 pagesT FG Martinez Bae NaIsrael EmmanuelPas encore d'évaluation
- Practice Test - Chapter 9Document13 pagesPractice Test - Chapter 9yawahabPas encore d'évaluation
- Lec4Statics Moment of A Forcepptx 1Document54 pagesLec4Statics Moment of A Forcepptx 1Jared RosePas encore d'évaluation
- Engineering Mechanics Prof. Manoj Harbola Indian Institute of Technology, Kanpur Module - 01 Lecture - 01 Review Vector and Laws of MotionDocument33 pagesEngineering Mechanics Prof. Manoj Harbola Indian Institute of Technology, Kanpur Module - 01 Lecture - 01 Review Vector and Laws of Motionlechu-92Pas encore d'évaluation
- Real and P-Adic AnalysisDocument91 pagesReal and P-Adic Analysisdmtri100% (1)
- Lectures On Finite Element MethodDocument111 pagesLectures On Finite Element Methodlphuong_20100% (1)
- Lecture 01 - Vectors in R 2 and R 3Document9 pagesLecture 01 - Vectors in R 2 and R 3joel.phillip92Pas encore d'évaluation
- Matlab Code - 2D Structured and Unstructred MeshDocument12 pagesMatlab Code - 2D Structured and Unstructred MeshAbhiyan PaudelPas encore d'évaluation
- Activity Worksheet 1Document4 pagesActivity Worksheet 1api-395493982Pas encore d'évaluation
- Moment and CoupleDocument18 pagesMoment and CouplejaganathanbePas encore d'évaluation
- Information Geometry in Functional Spaces of Classical and Quantum Finite Statistical SystemsDocument25 pagesInformation Geometry in Functional Spaces of Classical and Quantum Finite Statistical Systemssepot24093Pas encore d'évaluation
- (Springer Series in Computational Mathematics 27) Richard S. Varga (Auth.) - Matrix Iterative Analysis - Springer-Verlag Berlin Heidelberg (2000)Document369 pages(Springer Series in Computational Mathematics 27) Richard S. Varga (Auth.) - Matrix Iterative Analysis - Springer-Verlag Berlin Heidelberg (2000)guruviswa_rPas encore d'évaluation
- Vector Space Interpretation of Random VariablesDocument6 pagesVector Space Interpretation of Random VariablesSiva Kumar GaniPas encore d'évaluation
- Assignment 1-Engg MechDocument3 pagesAssignment 1-Engg Mechsanjay50% (2)
- Elementary Course of Infinitesimal CalculusDocument648 pagesElementary Course of Infinitesimal CalculusMarcel StefanitaPas encore d'évaluation
- 2 - 5 Zeros of Poly FNDocument6 pages2 - 5 Zeros of Poly FNkaloy33Pas encore d'évaluation
- M. Spivak - Calculus On Manifolds PDFDocument158 pagesM. Spivak - Calculus On Manifolds PDFEstudante de Ciências100% (1)
- Project Report On OCRDocument55 pagesProject Report On OCRNisarg Patel80% (5)
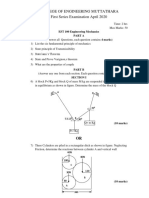
- College of Engineering Muttathara First Series Examination April 2020Document2 pagesCollege of Engineering Muttathara First Series Examination April 2020Ahammed SalamPas encore d'évaluation
- cs450 Chapt02Document101 pagescs450 Chapt02Davis LeePas encore d'évaluation
- Chap01 Metric and Normed SpacesDocument34 pagesChap01 Metric and Normed Spacesgod40Pas encore d'évaluation
- Definition Maths HSSC II Waqas SulaimanDocument6 pagesDefinition Maths HSSC II Waqas SulaimanAbdullah BajwaPas encore d'évaluation
- Mathematics 2018 PDFDocument98 pagesMathematics 2018 PDFUsama NadeemPas encore d'évaluation
- Electric and Magnetic FieldsDocument2 pagesElectric and Magnetic FieldsShootingStarPhotonsPas encore d'évaluation
- Math 535 - General TopologyDocument40 pagesMath 535 - General TopologyFabian MolinaPas encore d'évaluation
- Wikibooks Functional AnalysisDocument48 pagesWikibooks Functional Analysisjyoti swaroop repaka100% (1)
- Pau 2013Document13 pagesPau 2013Hyh HghjgPas encore d'évaluation
- LN 2122 Student1Document28 pagesLN 2122 Student1Fawzi SaadaPas encore d'évaluation
- Mechanics 1Document2 pagesMechanics 1Eunice FiecasPas encore d'évaluation