Vous aimerez peut-être aussi
- Computer Applications in Power SystemsDocument34 pagesComputer Applications in Power SystemsAlebel AyalnehPas encore d'évaluation
- Computer Methods in Power Systems Analysis with MATLABD'EverandComputer Methods in Power Systems Analysis with MATLABPas encore d'évaluation
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsD'EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsPas encore d'évaluation
- Machines II 2 MarksDocument25 pagesMachines II 2 MarksRajasekaran ViswanathanPas encore d'évaluation
- Economic Operation of Power SystemsDocument45 pagesEconomic Operation of Power SystemsDogbey BrightPas encore d'évaluation
- Mcqs Preparation For Engineering Competitive ExamsDocument11 pagesMcqs Preparation For Engineering Competitive ExamsHussam GujjarPas encore d'évaluation
- Eee-Viii-power System Operation and Control (06ee82) - NotesDocument138 pagesEee-Viii-power System Operation and Control (06ee82) - Noteskeerthanavijaya100% (3)
- Internal Procedure For Operating State GridDocument71 pagesInternal Procedure For Operating State GridSiddharth Bhawsar100% (1)
- 100 QuestionsDocument3 pages100 QuestionsprashantshivanagiPas encore d'évaluation
- Power System TransientsDocument11 pagesPower System TransientsKhairul AshrafPas encore d'évaluation
- Selection of Power Rating of MotorDocument6 pagesSelection of Power Rating of MotorSEC ExamcellPas encore d'évaluation
- Mcqs Preparation For Engineering Competitive ExamsDocument25 pagesMcqs Preparation For Engineering Competitive ExamsNitin MauryaPas encore d'évaluation
- Common SSR 2010-11 PDFDocument55 pagesCommon SSR 2010-11 PDFrizu230% (1)
- Advance Power SystemsDocument88 pagesAdvance Power SystemsRachit KhannaPas encore d'évaluation
- Transformer MaintenancDocument13 pagesTransformer MaintenancAnonymous m4MF1gPas encore d'évaluation
- Study of Over Current Earth Fault RelayDocument1 pageStudy of Over Current Earth Fault RelayVirender RanaPas encore d'évaluation
- Power Quality DisturbancesDocument25 pagesPower Quality DisturbancesVara Lakshmi100% (1)
- Voltage and Reactive Power ControlDocument34 pagesVoltage and Reactive Power Controlpsmeee100% (1)
- Voltage and Frequency ControlDocument12 pagesVoltage and Frequency ControlKhawarAminPas encore d'évaluation
- Relay SettingDocument17 pagesRelay SettingFuat BolatPas encore d'évaluation
- Losses in TransformerDocument15 pagesLosses in TransformerAnkit SrivastavaPas encore d'évaluation
- POWER SYSTEMS - 1 - QuestionsDocument7 pagesPOWER SYSTEMS - 1 - QuestionsB.Neelakanteshwar RaoPas encore d'évaluation
- Lecture Notes - Synchronous MachineDocument14 pagesLecture Notes - Synchronous MachineYuvraj GogoiPas encore d'évaluation
- Advanced Power System IIDocument2 pagesAdvanced Power System IIdurgesh_ahirPas encore d'évaluation
- High Low Impedance Busbar ProtectionDocument92 pagesHigh Low Impedance Busbar Protectionsugeng100% (1)
- Impulse Voltage Generator Modelling Using MATLAB PDFDocument8 pagesImpulse Voltage Generator Modelling Using MATLAB PDFAsmaPas encore d'évaluation
- Power System Interview QuestionDocument10 pagesPower System Interview QuestionTanuja Singh100% (1)
- Ferroresenance Phenomena of A Station Service Transformer During Black Start and Its Investigatio1Document4 pagesFerroresenance Phenomena of A Station Service Transformer During Black Start and Its Investigatio1pongpumPas encore d'évaluation
- Optimal Power Flow Solution For Indian Utility 62 Bus SystemDocument28 pagesOptimal Power Flow Solution For Indian Utility 62 Bus Systemyeshitela100% (1)
- Congestion in Power SystemDocument4 pagesCongestion in Power Systemsangeetarai100% (1)
- One-Line Diagram: Simplified Single-Phase Balanced Three-Phase Single Line Apparatus SymbolsDocument25 pagesOne-Line Diagram: Simplified Single-Phase Balanced Three-Phase Single Line Apparatus SymbolsSafina SygPas encore d'évaluation
- Single Line To Ground FaultDocument12 pagesSingle Line To Ground Faultluhusapa-1Pas encore d'évaluation
- Effect of Load Shedding Strategy On Interconnected Power Systems Stability When A Blackout OccursDocument6 pagesEffect of Load Shedding Strategy On Interconnected Power Systems Stability When A Blackout OccursMoon3pellPas encore d'évaluation
- Power System Stability Question PaperDocument8 pagesPower System Stability Question PaperMousa Dhrgham100% (1)
- DC Motor EarlierDocument229 pagesDC Motor Earlieranoopingle9Pas encore d'évaluation
- Fuse and Types of Fuses - Electrical Technology-OkDocument7 pagesFuse and Types of Fuses - Electrical Technology-Okdrastir_777100% (1)
- Substation Automation Basics - The Next GenerationDocument8 pagesSubstation Automation Basics - The Next GenerationAlly RaxaPas encore d'évaluation
- Bus Bar Protection REV 1Document18 pagesBus Bar Protection REV 1Jai GuptaPas encore d'évaluation
- Nigeria Grid 330kvDocument9 pagesNigeria Grid 330kvemmas90Pas encore d'évaluation
- M.E.Electrical Power System - 2 PDFDocument32 pagesM.E.Electrical Power System - 2 PDFAnonymous 9VcxlFErfPas encore d'évaluation
- Power System Reliability, Security and State Estimation NotesDocument14 pagesPower System Reliability, Security and State Estimation NotespriyaPas encore d'évaluation
- Transformers 17.7.14Document7 pagesTransformers 17.7.14TharinduPas encore d'évaluation
- Review Paper On Three Phase Fault AnalysisDocument6 pagesReview Paper On Three Phase Fault AnalysisPritesh Singh50% (2)
- Interconnected SystemDocument17 pagesInterconnected SystemChowdhury, A HasibPas encore d'évaluation
- Load Studies and Effects of Load VariationDocument14 pagesLoad Studies and Effects of Load VariationAreeba Mushtaq AhmedPas encore d'évaluation
- Welcome To A Presentation On: "Transmission-An Over View" BY A.Sai Prasad Sarma Retd. Ce/AptranscoDocument189 pagesWelcome To A Presentation On: "Transmission-An Over View" BY A.Sai Prasad Sarma Retd. Ce/AptranscoElwasila100% (1)
- Module Information Module Title Electric Drives and Control Module Code MMD2511Document4 pagesModule Information Module Title Electric Drives and Control Module Code MMD2511Ashley KaPas encore d'évaluation
- Generac - Gen Insulation ClassDocument4 pagesGenerac - Gen Insulation Class6609503100% (1)
- Electrical Safety by EarthingDocument36 pagesElectrical Safety by EarthingS Bharadwaj ReddyPas encore d'évaluation
- Optimal Load SheddingDocument36 pagesOptimal Load SheddingAkshay GhotekarPas encore d'évaluation
- Testing and Commissioning Notes-5,6,7Document20 pagesTesting and Commissioning Notes-5,6,7romanPas encore d'évaluation
- Symmetrical FaultsDocument11 pagesSymmetrical FaultsNeha RajputPas encore d'évaluation
- Insulation Co OrdinationDocument4 pagesInsulation Co OrdinationVasudha SinghPas encore d'évaluation
- Electrical Distribution Systems DOC1Document25 pagesElectrical Distribution Systems DOC1Ravi TejaPas encore d'évaluation
- Electrical InstallationsDocument48 pagesElectrical InstallationsSyed Muzammil AliPas encore d'évaluation
- Knowledge is "Real Power": Introduction to Power QualityD'EverandKnowledge is "Real Power": Introduction to Power QualityPas encore d'évaluation
- New Approaches to the Design and Economics of EHV Transmission Plant: International Series of Monographs in Electrical EngineeringD'EverandNew Approaches to the Design and Economics of EHV Transmission Plant: International Series of Monographs in Electrical EngineeringPas encore d'évaluation
- Safari - Jan 21, 2019 at 3:52 PMDocument1 pageSafari - Jan 21, 2019 at 3:52 PMMuhammad NizamuddinPas encore d'évaluation
- TransformersDocument24 pagesTransformersWonbae ChoiPas encore d'évaluation
- Tray and Ladder Practice GuideDocument73 pagesTray and Ladder Practice GuidemariusrotaruPas encore d'évaluation
- RMUDocument33 pagesRMUMuhammad NizamuddinPas encore d'évaluation
- TNB GuidelinesDocument132 pagesTNB GuidelinesDaecan Tee83% (6)
- Steve Jobs On of The Brilliant EntrepreneurDocument3 pagesSteve Jobs On of The Brilliant EntrepreneurMuhammad NizamuddinPas encore d'évaluation
- Measuring and Comparing Motor Starting MethodsDocument6 pagesMeasuring and Comparing Motor Starting MethodsMuhammad NizamuddinPas encore d'évaluation
- Kip Thorne Journal Gravitational Collapse Death of StarDocument9 pagesKip Thorne Journal Gravitational Collapse Death of Starpatricius327Pas encore d'évaluation
- Module-5 SemiconductorsDocument9 pagesModule-5 SemiconductorsKedar PunaginPas encore d'évaluation
- 29 1551-Lza7016011 1uen CMDocument217 pages29 1551-Lza7016011 1uen CMGhizlane MounjimPas encore d'évaluation
- AC Tank Type Test TRFRMR by HAEFELYDocument20 pagesAC Tank Type Test TRFRMR by HAEFELYmadhukarreddy2811Pas encore d'évaluation
- Physics Investigatory ProjectDocument10 pagesPhysics Investigatory Projectdarshna100% (5)
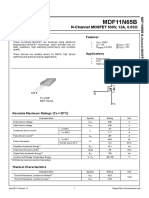
- MDF11N65BDocument6 pagesMDF11N65BElec FoPas encore d'évaluation
- Type of Energy Lesson 1Document4 pagesType of Energy Lesson 1Helin TARPISPas encore d'évaluation
- Compact Power Pack Type HC: 1. Design and General InformationDocument17 pagesCompact Power Pack Type HC: 1. Design and General InformationCesar MessiasPas encore d'évaluation
- 0.1 Single Time Constant Circuit: No Energy Storage Elements No Independent GeneratorsDocument10 pages0.1 Single Time Constant Circuit: No Energy Storage Elements No Independent GeneratorsSimone MolinaroPas encore d'évaluation
- Siemens Sicat SR Pi enDocument12 pagesSiemens Sicat SR Pi enIsrael SotoPas encore d'évaluation
- Explanation of RoutineTests For FATs On Current Transformers According To IEC 60044Document6 pagesExplanation of RoutineTests For FATs On Current Transformers According To IEC 60044Hung VuPas encore d'évaluation
- Manometer Pressure DifferenceDocument5 pagesManometer Pressure DifferenceBlue SkyPas encore d'évaluation
- Physics Bowl PB - 1994Document13 pagesPhysics Bowl PB - 1994James SuPas encore d'évaluation
- Elex DC Cir 2Document2 pagesElex DC Cir 2Jaiko BendoPas encore d'évaluation
- Negative-Sequence Differential Protection - Principles, Sensitivity, and SecurityDocument17 pagesNegative-Sequence Differential Protection - Principles, Sensitivity, and SecurityPhạm Khánh TâmPas encore d'évaluation
- Chapter 8. Griffiths-Conservation Laws 8.2Document19 pagesChapter 8. Griffiths-Conservation Laws 8.2Sami Tsegu ShewanPas encore d'évaluation
- BJT Amplifier SimulationDocument11 pagesBJT Amplifier SimulationNiko de LemosPas encore d'évaluation
- ETP48600 V100R001C02 Embedded Power User ManualDocument70 pagesETP48600 V100R001C02 Embedded Power User ManualLFFstarPas encore d'évaluation
- EEE105 Circuit Theory 1 - Chapter 1 Basic Concepts 2022 - 2023Document28 pagesEEE105 Circuit Theory 1 - Chapter 1 Basic Concepts 2022 - 2023Muhammad Akmal Bin Mohd FauziPas encore d'évaluation
- Foundation Physics I (PHY094) : Motion in One DimensionDocument24 pagesFoundation Physics I (PHY094) : Motion in One DimensionIsmul AzamPas encore d'évaluation
- HVAC Mechanical Plans Aircon Project 2Document3 pagesHVAC Mechanical Plans Aircon Project 2Paul Camu100% (2)
- Who Invented The TransformerDocument4 pagesWho Invented The TransformerJulioPas encore d'évaluation
- Atmospheric Blowdown Tank Calculation ReportDocument49 pagesAtmospheric Blowdown Tank Calculation ReporttauqeerPas encore d'évaluation
- En g3mc PDFDocument4 pagesEn g3mc PDFAshrafuz ZamanPas encore d'évaluation
- Grid Energy Storage - WikipediaDocument27 pagesGrid Energy Storage - Wikipediapowew28978Pas encore d'évaluation
- Direct calculation of added mass of oscillating circular cylinderDocument5 pagesDirect calculation of added mass of oscillating circular cylinderKhoironSyamdatuPas encore d'évaluation
- Separation of Ammonia and WaterDocument5 pagesSeparation of Ammonia and WaterJamie MalonePas encore d'évaluation
- Midterm Exam - HydraulicsDocument1 pageMidterm Exam - HydraulicsGhiovani DayananPas encore d'évaluation
- Eckert-1950-Analysis of Turbulent Free Convection Boundary Layer On Flat PlateDocument23 pagesEckert-1950-Analysis of Turbulent Free Convection Boundary Layer On Flat PlateDom BooPas encore d'évaluation
- Technology and Development of 800 KV HVDC Applications: M. Haeusler H. Huang V. Ramaswami D. KumarDocument12 pagesTechnology and Development of 800 KV HVDC Applications: M. Haeusler H. Huang V. Ramaswami D. KumarRatheesh KumarPas encore d'évaluation