Vous aimerez peut-être aussi
- Apostila Fisica Parte 1 CeepDocument85 pagesApostila Fisica Parte 1 CeepJose Jesito de CarvalhoPas encore d'évaluation
- Lista 3Document16 pagesLista 3PeboPas encore d'évaluation
- 02 Lista TermodinamicaDocument4 pages02 Lista TermodinamicaWashington DCPas encore d'évaluation
- Resolução Física 2 - Módulo SASDocument9 pagesResolução Física 2 - Módulo SASSamuelPas encore d'évaluation
- Alinhamento de CorreiaDocument4 pagesAlinhamento de CorreiaHussein GazelPas encore d'évaluation
- Ex Resolvido 01 VMDocument4 pagesEx Resolvido 01 VMHussein GazelPas encore d'évaluation
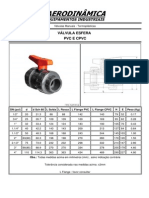
- Aerodinamica Valvulas Manuais - Termoplasticas Valvula Esfera PVC e CPVCDocument1 pageAerodinamica Valvulas Manuais - Termoplasticas Valvula Esfera PVC e CPVCHussein GazelPas encore d'évaluation
- Painel-Vibração ForçadaDocument3 pagesPainel-Vibração ForçadaHussein GazelPas encore d'évaluation
- Vibrações Mecânicas Resumo Da Teoria e ExercíciosDocument214 pagesVibrações Mecânicas Resumo Da Teoria e ExercíciosMaia202Pas encore d'évaluation
- VM Vibrações Forçadas 01Document23 pagesVM Vibrações Forçadas 01Hussein GazelPas encore d'évaluation
- VM Mov Oscil 01Document7 pagesVM Mov Oscil 01Hussein GazelPas encore d'évaluation
- Capítulo6 - Apostila de Mecânica Das VibraçõesDocument11 pagesCapítulo6 - Apostila de Mecânica Das VibraçõesHussein GazelPas encore d'évaluation
- Capítulo7 - Apostila de Mecânica Das VibraçoesDocument24 pagesCapítulo7 - Apostila de Mecânica Das VibraçoesHussein GazelPas encore d'évaluation
- Hidrostática (Extra) PDFDocument14 pagesHidrostática (Extra) PDFMateus Ferrari LuzPas encore d'évaluation
- 1001 Física - PRFDocument54 pages1001 Física - PRFRodrigo E JulianaPas encore d'évaluation
- Unid 2Document12 pagesUnid 2Eder RibeiroPas encore d'évaluation
- Física 1º Ano EditoradaDocument4 pagesFísica 1º Ano EditoradaWelen CarolinePas encore d'évaluation
- Caderno de Receitas Concreto Armado - Pilares - Vol. 2 - LivroDocument191 pagesCaderno de Receitas Concreto Armado - Pilares - Vol. 2 - Livrojoaoschultz1997Pas encore d'évaluation
- EmpolamentoDocument2 pagesEmpolamentoAlexFrankPas encore d'évaluation
- Relatório Física II - Equivalente Calor e EnergiaDocument10 pagesRelatório Física II - Equivalente Calor e EnergiaMaay ChanPas encore d'évaluation
- Mudança de Variáveis Na Integral Dupla - AplicaçõesDocument50 pagesMudança de Variáveis Na Integral Dupla - AplicaçõesronaldlucarvalhoPas encore d'évaluation
- RelatoriodeestagioDocument93 pagesRelatoriodeestagiojoelsonPas encore d'évaluation
- Vest2005 ProvaGrupo2Document9 pagesVest2005 ProvaGrupo2Felipe Leal SampaioPas encore d'évaluation
- Teorema Da Energia Cinética PDFDocument16 pagesTeorema Da Energia Cinética PDFMadalena BrasãoPas encore d'évaluation
- NBR 6355 PB 347 - PFFDocument37 pagesNBR 6355 PB 347 - PFFJosé Da SilvaPas encore d'évaluation
- LISTA 39 Cap 11 Momento AngularDocument2 pagesLISTA 39 Cap 11 Momento Angulargravidade20036922Pas encore d'évaluation
- Fisica ENEM Questoes Por Assunto Respostas ComentadasDocument126 pagesFisica ENEM Questoes Por Assunto Respostas ComentadasPaulo MoreiraPas encore d'évaluation
- DINÂMICA DE TRANSLAÇÃO e ROTAÇÃODocument9 pagesDINÂMICA DE TRANSLAÇÃO e ROTAÇÃOValdir Quental50% (2)
- Projeto Alimentação Saudável Aula Semana Completo 6º AnoDocument40 pagesProjeto Alimentação Saudável Aula Semana Completo 6º AnoElaine EstevamPas encore d'évaluation
- Relatório Determinação Da Constnte de PlanckDocument11 pagesRelatório Determinação Da Constnte de PlanckAna MariaPas encore d'évaluation
- Questões Cinemática e Dinâmica - RespostasDocument11 pagesQuestões Cinemática e Dinâmica - RespostasJesus RosaPas encore d'évaluation
- Engenharia - Mecanica - Tomo - 05Document54 pagesEngenharia - Mecanica - Tomo - 05Renato Balarini FerreiraPas encore d'évaluation
- Relatorio 1 - Conservação Da Quantidade de MovimentoDocument2 pagesRelatorio 1 - Conservação Da Quantidade de MovimentoSuellenThaysPas encore d'évaluation
- Aula 2 e 3 HIDRAÚLICA HisdrostáticaDocument41 pagesAula 2 e 3 HIDRAÚLICA HisdrostáticaAdilson Bermudes CardosoPas encore d'évaluation
- Fisexp2 ManDocument60 pagesFisexp2 ManfelipePas encore d'évaluation
- Questoes Globalizantes Fisica ASA ResolucaoDocument15 pagesQuestoes Globalizantes Fisica ASA ResolucaoDiogo Alves DiasPas encore d'évaluation
- Cosmologia-Relatividade Geral PDFDocument51 pagesCosmologia-Relatividade Geral PDFRafael HenriquePas encore d'évaluation
- Unidade I GravitacaoDocument16 pagesUnidade I GravitacaoPedro Rafael Afonso Afonso100% (1)