Vous aimerez peut-être aussi
- Project Report: Line Following RobotDocument12 pagesProject Report: Line Following RobotAhsan MuradPas encore d'évaluation
- Line Robot FollowerDocument23 pagesLine Robot Followeratul mishra100% (1)
- Line FollowerDocument13 pagesLine FollowerFarah AzamPas encore d'évaluation
- Line Follower ReportDocument23 pagesLine Follower Reportatul mishra88% (8)
- Project Report: Digital Logic DesignsDocument17 pagesProject Report: Digital Logic DesignsSiddique FarooqPas encore d'évaluation
- Optical EncoderDocument5 pagesOptical EncoderWicaksono Tegar Kristantyo100% (1)
- Robotics PDFDocument19 pagesRobotics PDFGiovanna PerezPas encore d'évaluation
- Advanced Line FollowerDocument15 pagesAdvanced Line FollowerMohtasim NakibPas encore d'évaluation
- Autonoums Robotics Part 1: IR Led Detector CKTDocument14 pagesAutonoums Robotics Part 1: IR Led Detector CKTSameer SalamPas encore d'évaluation
- Line Tracking Sensors and AlgorithmsDocument8 pagesLine Tracking Sensors and AlgorithmsГОРДАН ИЛИЕВPas encore d'évaluation
- Line Follower SynopsisDocument14 pagesLine Follower SynopsisAshmeet SabbyPas encore d'évaluation
- Robotics Club (Rtist)Document26 pagesRobotics Club (Rtist)Ashish MaddheshiyaPas encore d'évaluation
- LFR ProposalDocument3 pagesLFR ProposalAbd-e-Munaf KalimeePas encore d'évaluation
- How To Build A Simple Line Tracer RobotDocument6 pagesHow To Build A Simple Line Tracer RobotaashlinnPas encore d'évaluation
- Parts Needed:-: IR SensorDocument6 pagesParts Needed:-: IR SensorkjsdjkfPas encore d'évaluation
- Line Follower RobotDocument10 pagesLine Follower Robotvishal groverPas encore d'évaluation
- Technical Report of Building A Line Follower RobotDocument6 pagesTechnical Report of Building A Line Follower RobotLuizPas encore d'évaluation
- Line Tracking Is A Very Important Notion in The World of Robotics As It Give To The Robot A PreciseDocument16 pagesLine Tracking Is A Very Important Notion in The World of Robotics As It Give To The Robot A PreciseHonney Sunny K KPas encore d'évaluation
- Line Follower Robot ProjectDocument6 pagesLine Follower Robot ProjectPravin GaretaPas encore d'évaluation
- Autonomous Bot MakingDocument45 pagesAutonomous Bot MakingSudhir ImperfectPas encore d'évaluation
- Line Follower Robot ProjectDocument45 pagesLine Follower Robot ProjectJeffery YipPas encore d'évaluation
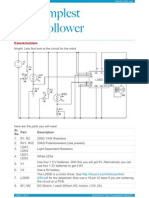
- The Simplest Line Follower: ConstructionDocument5 pagesThe Simplest Line Follower: Constructionapi-115728880Pas encore d'évaluation
- Line FollowerDocument6 pagesLine FollowerD Sreeram BhargavPas encore d'évaluation
- A Project Report On Line Follower: RobotDocument14 pagesA Project Report On Line Follower: RobotMegha OmshreePas encore d'évaluation
- April 2022Document12 pagesApril 2022Pavithra VPas encore d'évaluation
- ArduinoDocument9 pagesArduinoThirdy LuchingPas encore d'évaluation
- Robot Project JaseungDocument7 pagesRobot Project JaseungGiri MuruganPas encore d'évaluation
- Line Follower Robot - J4rv4i1010Document4 pagesLine Follower Robot - J4rv4i1010Journal 4 ResearchPas encore d'évaluation
- Line Follower RobotDocument22 pagesLine Follower Robotkawish4uPas encore d'évaluation
- Non Programmable Line Follower RobotDocument27 pagesNon Programmable Line Follower RobotAsish Kumar Sharma100% (1)
- PID Controller For Lego Mind Storms RobotsDocument16 pagesPID Controller For Lego Mind Storms RobotsEnio DiazPas encore d'évaluation
- Line Follower RobotDocument16 pagesLine Follower RobotSebastian NistoricăPas encore d'évaluation
- Line - Following - Robot 2019 09 11 12 49 PDFDocument3 pagesLine - Following - Robot 2019 09 11 12 49 PDFMegharaj GoudarPas encore d'évaluation
- Project 2Document11 pagesProject 2John CedrickPas encore d'évaluation
- Line Following RobotDocument17 pagesLine Following RobotSon TeaPas encore d'évaluation
- Major Project - Grid Solving RobotDocument84 pagesMajor Project - Grid Solving RobotAshish Bharade57% (7)
- Arduino Line Follower Robot With QRD1114Document20 pagesArduino Line Follower Robot With QRD1114daniel_i_denev100% (1)
- Line Follower Robot Using LabVIEWDocument6 pagesLine Follower Robot Using LabVIEWTrần Huy Vinh QuangPas encore d'évaluation
- Line Follower RobotDocument21 pagesLine Follower RobotaasthaPas encore d'évaluation
- An Open Loop Diection Control Sysytem - The Line FollowerDocument9 pagesAn Open Loop Diection Control Sysytem - The Line FollowerNaveen Mahadev AdigaPas encore d'évaluation
- The LM324 Quad Op-Amp Line Follower Robot With Pulse Width ModulationDocument15 pagesThe LM324 Quad Op-Amp Line Follower Robot With Pulse Width ModulationMeyersson BeltranPas encore d'évaluation
- 1.1 What Is A Line Follower?: Automated Line-Following RobotDocument39 pages1.1 What Is A Line Follower?: Automated Line-Following Robotajay9953Pas encore d'évaluation
- Rich Text Editor FileDocument39 pagesRich Text Editor FilePrem KumarPas encore d'évaluation
- Line Follower Robot Using 8051 Micro ControllerDocument34 pagesLine Follower Robot Using 8051 Micro Controllerm.abdullah100% (2)
- Co Project: Edge Avoiding Robot USING 8051 MicrocontrollerDocument14 pagesCo Project: Edge Avoiding Robot USING 8051 MicrocontrollerJuthik BVPas encore d'évaluation
- Line Following RobotDocument17 pagesLine Following RobotSujeet KumarPas encore d'évaluation
- PID Controller For Lego Mindstorms RobotsDocument14 pagesPID Controller For Lego Mindstorms RobotsFelipe ApazaPas encore d'évaluation
- Line Follower ATMEGA16 WWW - Robotechno.usDocument17 pagesLine Follower ATMEGA16 WWW - Robotechno.usSarang WadekarPas encore d'évaluation
- STEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10D'EverandSTEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10Pas encore d'évaluation
- Master Builder Power Up! Level 3: Minecraft® Redstone for Advanced PlayersD'EverandMaster Builder Power Up! Level 3: Minecraft® Redstone for Advanced PlayersÉvaluation : 4 sur 5 étoiles4/5 (9)
- Nfjpia Mockboard 2011 BLTDocument12 pagesNfjpia Mockboard 2011 BLTVon Wilson AjocPas encore d'évaluation
- Andaman & Nicobar: Port BlairDocument4 pagesAndaman & Nicobar: Port BlairDevan BhallaPas encore d'évaluation
- Variable Length Subnet MasksDocument4 pagesVariable Length Subnet MaskszelalemPas encore d'évaluation
- Research On Surface Roughness by Laser CDocument5 pagesResearch On Surface Roughness by Laser CfatmirhusejniPas encore d'évaluation
- Allergies To Cross-Reactive Plant Proteins: Takeshi YagamiDocument11 pagesAllergies To Cross-Reactive Plant Proteins: Takeshi YagamisoylahijadeunvampiroPas encore d'évaluation
- Multicomponent Distillation Shortcut MethodDocument5 pagesMulticomponent Distillation Shortcut MethodDiegoAndréVegaDávalosPas encore d'évaluation
- Tesco Travel Policy BookletDocument64 pagesTesco Travel Policy Bookletuser001hPas encore d'évaluation
- Process Plant Layout and Piping DesignDocument4 pagesProcess Plant Layout and Piping Designktsnl100% (1)
- RECRUITMENT AGENCIES IN U.A.E. (Here Is A List Containing 150+ Names)Document22 pagesRECRUITMENT AGENCIES IN U.A.E. (Here Is A List Containing 150+ Names)raajc12380% (5)
- 11.traders Virtual Mag OTA July 2011 WebDocument68 pages11.traders Virtual Mag OTA July 2011 WebAde CollinsPas encore d'évaluation
- Aml Questionnaire For Smes: CheduleDocument5 pagesAml Questionnaire For Smes: CheduleHannah CokerPas encore d'évaluation
- REID CatalogDocument54 pagesREID Catalogzhaoye maoPas encore d'évaluation
- Title To The ProjectDocument14 pagesTitle To The ProjectJatinChadhaPas encore d'évaluation
- Ein Extensive ListDocument60 pagesEin Extensive ListRoberto Monterrosa100% (2)
- Project Proposal - Articulation SessionsDocument8 pagesProject Proposal - Articulation SessionsJhay-are PogoyPas encore d'évaluation
- Agenda 9Document46 pagesAgenda 9Bala Gangadhar TilakPas encore d'évaluation
- Transport StrikeDocument9 pagesTransport StrikeYsrael Von ArcillaPas encore d'évaluation
- Security Enhancement in 2016 SQL ServerDocument21 pagesSecurity Enhancement in 2016 SQL ServerAtul SharmaPas encore d'évaluation
- Memorandum of AgreementDocument6 pagesMemorandum of AgreementJomar JaymePas encore d'évaluation
- Hyster Forklift Class 5 Internal Combustion Engine Trucks g019 h13xm h12xm 12ec Service ManualsDocument23 pagesHyster Forklift Class 5 Internal Combustion Engine Trucks g019 h13xm h12xm 12ec Service Manualsedwinodom070882sad100% (72)
- What Is SAP PS (Project Systems) ModuleDocument3 pagesWhat Is SAP PS (Project Systems) ModuleahmerPas encore d'évaluation
- High-Definition Multimedia Interface SpecificationDocument51 pagesHigh-Definition Multimedia Interface SpecificationwadrPas encore d'évaluation
- Sterling PumpeDocument20 pagesSterling PumpesrdzaPas encore d'évaluation
- Schema Elctrica Placa Baza Toshiba A500-13wDocument49 pagesSchema Elctrica Placa Baza Toshiba A500-13wnicmaxxusPas encore d'évaluation
- Management by ObjectivesDocument30 pagesManagement by ObjectivesJasmandeep brar100% (4)
- Magicolor2400 2430 2450FieldSvcDocument262 pagesMagicolor2400 2430 2450FieldSvcKlema HanisPas encore d'évaluation
- Consolidated Digests - Part 2Document314 pagesConsolidated Digests - Part 2Neil Patrick Pepito ErmacPas encore d'évaluation
- MB0048 Operation Research Assignments Feb 11Document4 pagesMB0048 Operation Research Assignments Feb 11Arvind KPas encore d'évaluation
- Refference 01 Sheethal Visa Rejection Reason ExplanationDocument3 pagesRefference 01 Sheethal Visa Rejection Reason ExplanationAniket PatelPas encore d'évaluation
- Fashion Designing Sample Question Paper1Document3 pagesFashion Designing Sample Question Paper1Aditi VermaPas encore d'évaluation