Vous aimerez peut-être aussi
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Staar Eoc 2016 Test AlgebraDocument39 pagesStaar Eoc 2016 Test AlgebrachrisPas encore d'évaluation
- IT B.tech AR CS Detailed Syllabus 21-03-13Document223 pagesIT B.tech AR CS Detailed Syllabus 21-03-13sukanyaPas encore d'évaluation
- Mth166:Differential Equations and Vector Calculus: Session 2021-22 Page:1/1Document1 pageMth166:Differential Equations and Vector Calculus: Session 2021-22 Page:1/1Mohit RajPas encore d'évaluation
- Anna University Chennai:: Chennai - 600 025 Curriculum 2004 B.Tech. Petroleum EngineeringDocument64 pagesAnna University Chennai:: Chennai - 600 025 Curriculum 2004 B.Tech. Petroleum EngineeringSc Sathish KumarPas encore d'évaluation
- F.y.b.sc (2013 Pattern) Oct 2016Document101 pagesF.y.b.sc (2013 Pattern) Oct 2016Pratik PawarPas encore d'évaluation
- Ch3-Complex Numbers-Class 11 - Revisioin Notes With QuestionsDocument19 pagesCh3-Complex Numbers-Class 11 - Revisioin Notes With QuestionsAbhradeep GhoshPas encore d'évaluation
- mth108 MCQ For Practice PDFDocument2 pagesmth108 MCQ For Practice PDFGowtham Chandrasekar100% (1)
- StaticsDocument135 pagesStaticsTheod VilaPas encore d'évaluation
- Journal of Number Theory: D. Constales, R. de Almeida, Rolf Sören KraußharDocument14 pagesJournal of Number Theory: D. Constales, R. de Almeida, Rolf Sören Kraußharعقبة عقبةPas encore d'évaluation
- Rev - 2023-25 - MAT - JR - Super60 - Nucleus BT - Teaching&Test Schedule M, P, C - W.E.F - 23-04-23@ 20th JuneDocument22 pagesRev - 2023-25 - MAT - JR - Super60 - Nucleus BT - Teaching&Test Schedule M, P, C - W.E.F - 23-04-23@ 20th Junelasyanshu100% (1)
- TeacherGuide-1 220911 154001Document101 pagesTeacherGuide-1 220911 154001JhonS MubeenPas encore d'évaluation
- ALGEBRADocument4 pagesALGEBRAJames Darwin SorianoPas encore d'évaluation
- Beer's Law LabDocument4 pagesBeer's Law LabStephen Libbing100% (1)
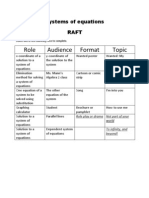
- Systems of Equations RAFTDocument1 pageSystems of Equations RAFTrachelrosalesPas encore d'évaluation
- Solutions To Difference EquationsDocument22 pagesSolutions To Difference EquationsKenneth LandichoPas encore d'évaluation
- Adomian Decomposition Method With Different Polynomials ForDocument11 pagesAdomian Decomposition Method With Different Polynomials ForTesfaye Teferi ShonePas encore d'évaluation
- Power Series Solutions To The Legendre Equation and The Legendre PolynomialsDocument6 pagesPower Series Solutions To The Legendre Equation and The Legendre PolynomialsJimmy WernerPas encore d'évaluation
- Mathematical Method For Physicists Ch. 1 & 2 Selected Solutions Webber and ArfkenDocument7 pagesMathematical Method For Physicists Ch. 1 & 2 Selected Solutions Webber and ArfkenJosh Brewer100% (3)
- Continuation Methods For Non-Linear Analysis: FR: Méthodes de Pilotage Du ChargementDocument32 pagesContinuation Methods For Non-Linear Analysis: FR: Méthodes de Pilotage Du ChargementStefano MilaniPas encore d'évaluation
- 2017-2018 Observation 2Document4 pages2017-2018 Observation 2api-317511549Pas encore d'évaluation
- Linear Equations Cheat SheetDocument1 pageLinear Equations Cheat SheetAnthea ClarkePas encore d'évaluation
- Mathematics G9-REPRINT 2021Document303 pagesMathematics G9-REPRINT 2021ReshPas encore d'évaluation
- Direct Drive Friction Welding: A Comprehensive Mathematical ModelDocument14 pagesDirect Drive Friction Welding: A Comprehensive Mathematical ModelKawnefPas encore d'évaluation
- Tsunamis and Hurricanes A Mathematical Approach PDFDocument201 pagesTsunamis and Hurricanes A Mathematical Approach PDFMiguel NevesPas encore d'évaluation
- A-Levels Pure Mathematics ExemplarDocument16 pagesA-Levels Pure Mathematics ExemplarDarlingtonPas encore d'évaluation
- ABE Introduction To Quantitative MethodDocument4 pagesABE Introduction To Quantitative MethodOrnellaNaliniJogie100% (1)
- Wolfram - Alpha Activity - Topic, Intermediate Algebra Activities - SolutionsDocument23 pagesWolfram - Alpha Activity - Topic, Intermediate Algebra Activities - SolutionsPearson Math StatsPas encore d'évaluation
- STP1455 Eb.1415051 1 PDFDocument221 pagesSTP1455 Eb.1415051 1 PDFpaola100% (1)
- Nautical Science Syllabus PDFDocument77 pagesNautical Science Syllabus PDFDevansh TyagiPas encore d'évaluation
- MAT1100 Syllabus 2020 PDFDocument3 pagesMAT1100 Syllabus 2020 PDFPotrine Muzumba100% (2)